复习日
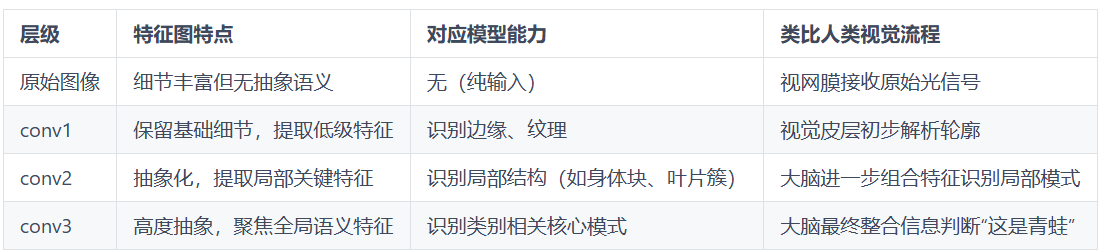
1.卷积神经网络的基本概念
2.kaggle找到一个图像数据集,用cnn网络进行训练并且用grad-cam做可视化
进阶:并拆分成多个文件
tips:注册kaggle的注意事项
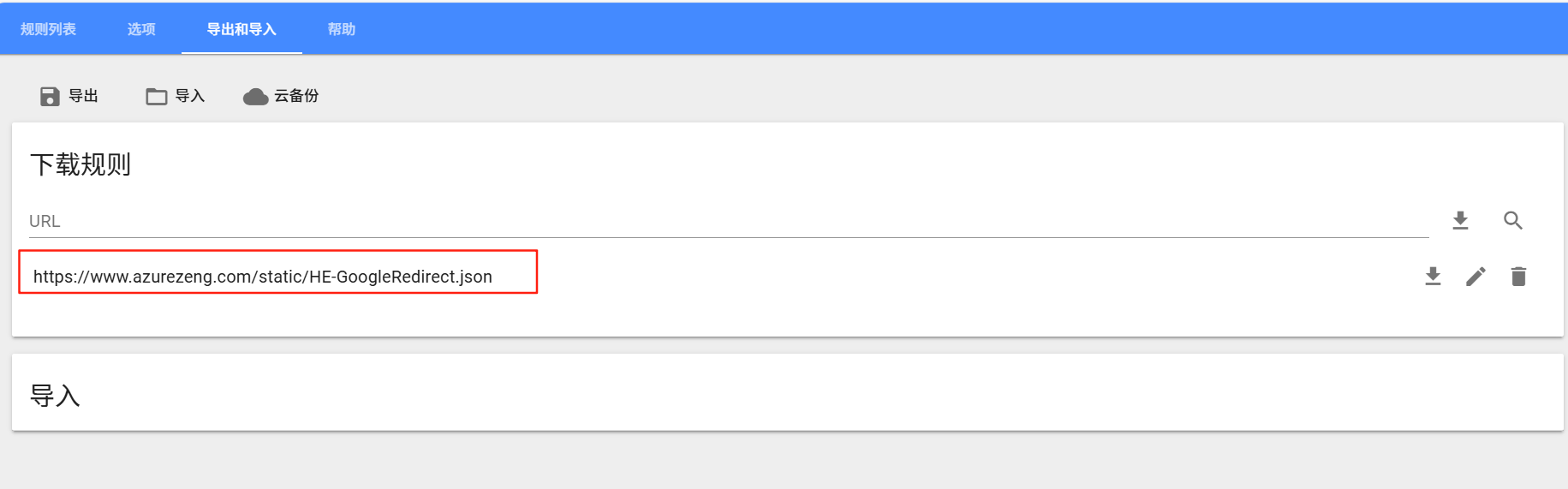
安装插件:Header Editor
然后打开扩展选项:
输入网址:https://www.azurezeng.com/static/HE-GoogleRedirect.json
导入保存即可,刷新注册页面完成注册。

import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms, models
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np
import torch.nn.functional as F
# 设置随机种子确保结果可复现
torch.manual_seed(42)
np.random.seed(42)
# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")
# 1. 数据预处理
# 训练集:使用多种数据增强方法提高模型泛化能力
train_transform = transforms.Compose([
# 新增:调整图像大小为统一尺寸
transforms.Resize((32, 32)), # 确保所有图像都是32x32像素
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),
transforms.RandomRotation(15),
transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))])
# 测试集:仅进行必要的标准化,保持数据原始特性
test_transform = transforms.Compose([
# 新增:调整图像大小为统一尺寸
transforms.Resize((32, 32)), # 确保所有图像都是32x32像素
transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
])
# 定义数据集根目录
root = r'day43'
train_dataset = datasets.ImageFolder(
root=root + '/training_set', # 指向 train 子文件夹
transform=train_transform
)
test_dataset = datasets.ImageFolder(
root=root + '/test_set', # 指向 test 子文件夹
transform=test_transform
)
# 打印类别信息,确认数据加载正确
print(f"训练集类别: {train_dataset.classes}")
print(f"测试集类别: {test_dataset.classes}")
# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 定义一个简单的CNN模型
class SimpleCNN(nn.Module):
def __init__(self):
super(SimpleCNN, self).__init__()
# 第一个卷积层,输入通道为3(彩色图像),输出通道为32,卷积核大小为3x3,填充为1以保持图像尺寸不变
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, padding=1)
# 第二个卷积层,输入通道为32,输出通道为64,卷积核大小为3x3,填充为1
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
# 第三个卷积层,输入通道为64,输出通道为128,卷积核大小为3x3,填充为1
self.conv3 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
# 最大池化层,池化核大小为2x2,步长为2,用于下采样,减少数据量并提取主要特征
self.pool = nn.MaxPool2d(2, 2)
# 第一个全连接层,输入特征数为128 * 4 * 4(经过前面卷积和池化后的特征维度),输出为512
self.fc1 = nn.Linear(128 * 4 * 4, 512)
# 第二个全连接层,输入为512,输出为2(对应猫和非猫两个类别)
self.fc2 = nn.Linear(512, 2)
def forward(self, x):
# 第一个卷积层后接ReLU激活函数和最大池化操作,经过池化后图像尺寸变为原来的一半,这里输出尺寸变为16x16
x = self.pool(F.relu(self.conv1(x)))
# 第二个卷积层后接ReLU激活函数和最大池化操作,输出尺寸变为8x8
x = self.pool(F.relu(self.conv2(x)))
# 第三个卷积层后接ReLU激活函数和最大池化操作,输出尺寸变为4x4
x = self.pool(F.relu(self.conv3(x)))
# 将特征图展平为一维向量,以便输入到全连接层
x = x.view(-1, 128 * 4 * 4)
# 第一个全连接层后接ReLU激活函数
x = F.relu(self.fc1(x))
# 第二个全连接层输出分类结果
x = self.fc2(x)
return x
# 初始化模型
model = SimpleCNN()
print("模型已创建")
# 如果有GPU则使用GPU,将模型转移到对应的设备上
model = model.to(device)
# 训练模型
def train_model(model, train_loader, test_loader, epochs=20):
# 定义损失函数为交叉熵损失,用于分类任务
criterion = nn.CrossEntropyLoss()
# 定义优化器为Adam,用于更新模型参数,学习率设置为0.001
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
for epoch in range(epochs):
# 训练阶段
model.train()
running_loss = 0.0
correct = 0
total = 0
for i, data in enumerate(train_loader, 0):
# 从数据加载器中获取图像和标签
inputs, labels = data
# 将图像和标签转移到对应的设备(GPU或CPU)上
inputs, labels = inputs.to(device), labels.to(device)
# 清空梯度,避免梯度累加
optimizer.zero_grad()
# 模型前向传播得到输出
outputs = model(inputs)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播计算梯度
loss.backward()
# 更新模型参数
optimizer.step()
running_loss += loss.item()
_, predicted = outputs.max(1)
total += labels.size(0)
correct += predicted.eq(labels).sum().item()
# 测试阶段
model.eval()
test_loss = 0
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = model(images)
test_loss += criterion(outputs, labels).item()
_, predicted = outputs.max(1)
total += labels.size(0)
correct += predicted.eq(labels).sum().item()
print(f'测试集 [{epoch + 1}] 损失: {test_loss/len(test_loader):.3f} | 准确率: {100.*correct/total:.2f}%')
print("训练完成")
return model
# 训练模型
try:
# 尝试加载预训练模型(如果存在)
model.load_state_dict(torch.load('cat_classifier.pth'))
print("已加载预训练模型")
except:
print("无法加载预训练模型,训练新模型")
model = train_model(model, train_loader, test_loader, epochs=10)
# 保存训练后的模型参数
torch.save(model.state_dict(), 'cat_classifier.pth')
# 设置模型为评估模式
model.eval()
# Grad-CAM实现
class GradCAM:
def __init__(self, model, target_layer):
self.model = model
self.target_layer = target_layer
self.gradients = None
self.activations = None
# 注册钩子,用于获取目标层的前向传播输出和反向传播梯度
self.register_hooks()
def register_hooks(self):
# 前向钩子函数,在目标层前向传播后被调用,保存目标层的输出(激活值)
def forward_hook(module, input, output):
self.activations = output.detach()
# 反向钩子函数,在目标层反向传播后被调用,保存目标层的梯度
def backward_hook(module, grad_input, grad_output):
self.gradients = grad_output[0].detach()
# 在目标层注册前向钩子和反向钩子
self.target_layer.register_forward_hook(forward_hook)
self.target_layer.register_backward_hook(backward_hook)
def generate_cam(self, input_image, target_class=None):
# 前向传播,得到模型输出
model_output = self.model(input_image)
if target_class is None:
# 如果未指定目标类别,则取模型预测概率最大的类别作为目标类别
target_class = torch.argmax(model_output, dim=1).item()
# 清除模型梯度,避免之前的梯度影响
self.model.zero_grad()
# 反向传播,构造one-hot向量,使得目标类别对应的梯度为1,其余为0,然后进行反向传播计算梯度
one_hot = torch.zeros_like(model_output)
one_hot[0, target_class] = 1
model_output.backward(gradient=one_hot)
# 获取之前保存的目标层的梯度和激活值
gradients = self.gradients
activations = self.activations
# 对梯度进行全局平均池化,得到每个通道的权重,用于衡量每个通道的重要性
weights = torch.mean(gradients, dim=(2, 3), keepdim=True)
# 加权激活映射,将权重与激活值相乘并求和,得到类激活映射的初步结果
cam = torch.sum(weights * activations, dim=1, keepdim=True)
# ReLU激活,只保留对目标类别有正贡献的区域,去除负贡献的影响
cam = F.relu(cam)
# 调整大小并归一化,将类激活映射调整为与输入图像相同的尺寸(32x32),并归一化到[0, 1]范围
cam = F.interpolate(cam, size=(32, 32), mode='bilinear', align_corners=False)
cam = cam - cam.min()
cam = cam / cam.max() if cam.max() > 0 else cam
return cam.cpu().squeeze().numpy(), target_class
# 可视化Grad-CAM结果的函数
import warnings
warnings.filterwarnings("ignore")
import matplotlib.pyplot as plt
# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
# 选择一个随机图像
# idx = np.random.randint(len(test_dataset))
idx = 50 # 选择测试集中的第49张图片 (索引从0开始)
image, label = test_dataset[idx]
print(f"选择的图像类别: {test_dataset.classes[label]}")
# 转换图像以便可视化
def tensor_to_np(tensor):
img = tensor.cpu().numpy().transpose(1, 2, 0)
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
img = std * img + mean
img = np.clip(img, 0, 1)
return img
# 添加批次维度并移动到设备
input_tensor = image.unsqueeze(0).to(device)
# 初始化Grad-CAM(选择最后一个卷积层)
grad_cam = GradCAM(model, model.conv3)
# 生成热力图
heatmap, pred_class = grad_cam.generate_cam(input_tensor)
# 可视化
plt.figure(figsize=(12, 4))
# 原始图像
plt.subplot(1, 3, 1)
plt.imshow(tensor_to_np(image))
plt.title(f"原始图像: {test_dataset.classes[label]}")
plt.axis('off')
# 热力图
plt.subplot(1, 3, 2)
plt.imshow(heatmap, cmap='jet')
plt.title(f"Grad-CAM热力图: {test_dataset.classes[pred_class]}")
plt.axis('off')
# 叠加的图像
plt.subplot(1, 3, 3)
img = tensor_to_np(image)
heatmap_resized = np.uint8(255 * heatmap)
heatmap_colored = plt.cm.jet(heatmap_resized)[:, :, :3]
superimposed_img = heatmap_colored * 0.4 + img * 0.6
plt.imshow(superimposed_img)
plt.title("叠加热力图")
plt.axis('off')
plt.tight_layout()
plt.show()@浙大疏锦行