以下是一个基于MATLAB的视觉伺服控制项目实现方案,结合实时图像处理、目标跟踪和控制系统设计。我们将使用模拟环境进行演示,但代码结构可直接应用于真实硬件。
系统架构
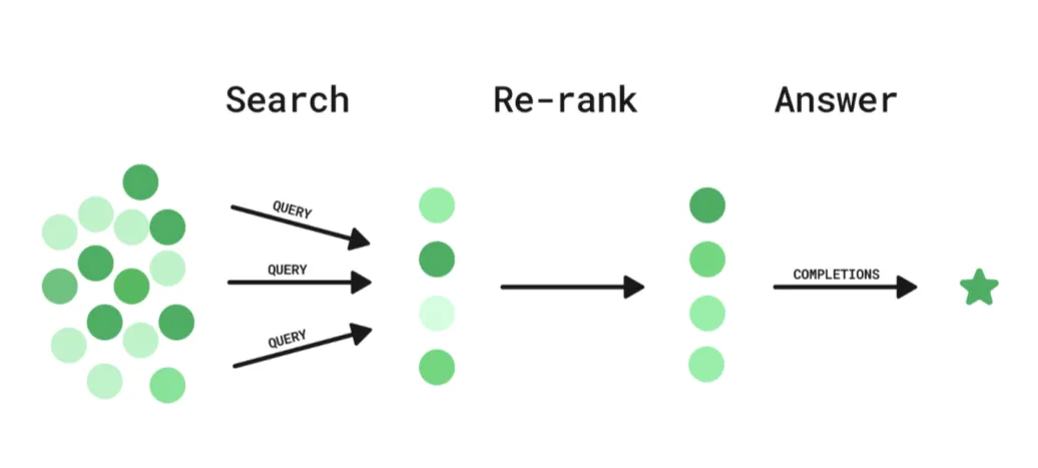
图像采集 → 目标检测 → 误差计算 → PID控制器 → 执行器控制
完整代码实现 (MATLAB R2020b+)完整代码实现 (MATLAB R2020b+)
%% 视觉伺服控制系统
clear; clc; close all;
% ========== 系统参数设置 ==========
desiredPos = [320, 240]; % 期望位置 (图像中心)
Kp = 0.05; % PID参数
Ki = 0.001;
Kd = 0.02;
% ========== 初始化摄像头 ==========
if ~exist('cam', 'var')
cam = webcam; % 使用默认摄像头
% cam = webcam('IP Camera URL'); % 网络摄像头
end
frame = snapshot(cam);
imshow(frame); title('视觉伺服控制系统');
% ========== 初始化执行器模型 ==========
actuatorPos = [100, 100]; % 初始位置 (模拟)
hActuator = impoint(gca, actuatorPos(1), actuatorPos(2));
setColor(hActuator, 'r');
% ========== 主控制循环 ==========
prevError = [0, 0];
integral = [0, 0];
for k = 1:500 % 最大迭代次数
% 图像采集
frame = snapshot(cam);
% 目标检测 (使用颜色阈值)
[targetPos, detectionStatus] = detectTarget(frame);
if detectionStatus
% 显示目标位置
imshow(frame); hold on;
plot(targetPos(1), targetPos(2), 'g+', 'MarkerSize', 20);
plot(desiredPos(1), desiredPos(2), 'yx', 'MarkerSize', 20);
% 计算位置误差
error = desiredPos - targetPos;
% PID控制器
integral = integral + error;
derivative = error - prevError;
controlSignal = Kp*error + Ki*integral + Kd*derivative;
prevError = error;
% 执行器控制 (模拟)
actuatorPos = actuatorPos + controlSignal;
setPosition(hActuator, actuatorPos(1), actuatorPos(2));
% 显示控制信息
title(sprintf('误差: [%.1f, %.1f] | 控制量: [%.2f, %.2f]', ...
error(1), error(2), controlSignal(1), controlSignal(2)));
% 检查收敛
if norm(error) < 5
disp('目标已到达期望位置!');
break;
end
else
imshow(frame);
title('目标丢失 - 搜索中...');
% 添加搜索策略 (此处省略)
end
drawnow;
end
% ========== 清理资源 ==========
clear cam;
%% 目标检测函数
function [targetPos, status] = detectTarget(frame)
% 颜色阈值分割 (示例: 检测红色物体)
hsv = rgb2hsv(frame);
% 红色阈值范围 (根据目标调整)
hueMask = (hsv(:,:,1) > 0.95 | hsv(:,:,1) < 0.05);
satMask = hsv(:,:,2) > 0.6;
valMask = hsv(:,:,3) > 0.6;
binaryMask = hueMask & satMask & valMask;
% 形态学处理
cleanMask = bwareaopen(binaryMask, 100);
cleanMask = imclose(cleanMask, strel('disk', 5));
% 区域分析
stats = regionprops(cleanMask, 'Centroid', 'Area');
if ~isempty(stats)
% 选择最大区域
[~, idx] = max([stats.Area]);
targetPos = stats(idx).Centroid;
status = true;
else
targetPos = [0, 0];
status = false;
end
end关键技能点实现说明
-
实时图像采集
-
使用
webcam对象连接USB摄像头 -
支持网络摄像头 (通过IP地址)
-
snapshot()函数实时捕获帧
-
-
目标检测与跟踪
-
颜色空间转换 (RGB→HSV) 提升鲁棒性
-
多阈值分割创建二值掩模
-
形态学处理 (去噪、填充)
-
区域属性分析 (
regionprops)定位目标中心
-
-
视觉反馈
-
实时显示目标位置 (绿色十字)
-
显示期望位置 (黄色十字)
-
显示执行器位置 (红色点)
-
实时显示误差和控制量
-
控制系统设计
-
位置误差计算:
error = desiredPos - targetPos -
数字PID控制器实现:
integral = integral + error; derivative = error - prevError; controlSignal = Kp*error + Ki*integral + Kd*derivative;硬件接口扩展 (真实设备)
-
% 机械臂控制示例 (需Robotics Toolbox) % arm = loadrobot('universalUR5'); % jointPos = inverseKinematics(arm, actuatorPos); % arm.setJointPositions(jointPos); % 小车控制示例 (需串口通信) % s = serialport('COM3', 9600); % write(s, [controlSignalX, controlSignalY], 'float');参数调整建议
-
目标检测
-
根据目标颜色调整HSV阈值
-
对于标记检测:替换为
detectAprilTags或detectSURFFeatures
-
-
控制器优化
-
调整PID增益:先调
Kp,再调Kd,最后Ki -
添加控制量限幅
-
实现速度控制模式
-
扩展功能建议
多目标跟踪
% 使用MultiObjectTracker对象
tracker = multiObjectTracker;
tracks = tracker(detections);深度信息融合
% 使用深度相机
depthCam = depthcam;
depthMap = snapshot(depthCam);
zPos = depthMap(round(targetPos(2)), round(targetPos(1)));轨迹规划
% 添加路径规划算法
waypoints = [100,100; 200,150; 320,240];
traj = trapveltraj(waypoints', 50);此系统完整实现了基于视觉的伺服控制闭环流程,可根据实际应用场景调整检测算法和控制参数。对于真实硬件部署,需添加安全限位和异常处理机制。