汽车安全:功能安全(FuSa)、预期功能安全(SOTIF)与网络安全(Cybersecurity) 从理论到实战的安全体系
引言:自动驾驶浪潮下的安全挑战
随着自动驾驶技术从L2向L4快速演进,汽车安全正从“机械可靠性”时代迈入“智能系统安全”的新纪元。据统计,2023年全球自动驾驶相关事故中,约67%涉及系统设计缺陷或未知场景应对不足。如何构建覆盖“系统失效-功能局限-外部攻击”的全维度安全体系?本文将结合经典案例与行业标准,深度解析**功能安全(FuSa)、预期功能安全(SOTIF)与网络安全(Cybersecurity)**的技术逻辑与协同机制。
一、功能安全(FuSa):守护系统的“内在防线”
定义:功能安全(Functional Safety)聚焦于电子电气(E/E)系统的非预期失效,通过ISO 26262标准规范开发流程,确保硬件故障和软件逻辑错误不会导致危险事件。
核心目标:在规格书(Spec)正确的前提下,通过故障检测、冗余设计等手段,将风险降低至可接受水平。
示例:
- 某车型的ESP(电子稳定程序)传感器因电磁干扰误报车身姿态,触发错误的制动指令。FuSa要求在传感器电路中增加滤波设计,并通过软件诊断监控信号合理性,避免因单点故障引发失控。
- 特斯拉Model 3的双冗余电池管理系统(BMS),通过独立的硬件通道和软件算法校验,确保电池状态监控的可靠性,符合ASIL D级功能安全要求。
关键工具:
- 故障树分析(FTA):自顶向下分析系统失效路径
- 失效模式与影响分析(FMEA):自底向上评估组件风险
- 安全机制测试:通过硬件在环(HiL)验证冗余切换逻辑
二、预期功能安全(SOTIF):突破规格书的“认知边界”
定义:预期功能安全(Safety of the Intended Functionality)解决因系统性能局限、功能不足或人员合理误用引发的危险,填补FuSa未覆盖的“规格书盲区”,遵循ISO 21448标准。
核心挑战:
- 数据驱动的不确定性:自动驾驶依赖的视觉模型可能漏检“骑自行车的行人横穿马路”(如2018年Uber致死事故)
- 算法黑箱特性:深度学习模型的决策逻辑难以通过传统测试完全验证
- 非技术因素:道路施工、交通参与者违规等“不可预测场景”
示例:Uber事故深度解析
- 场景还原:测试车模型仅识别“行人/自行车/车辆”三类目标,且假设其沿车道线行进。当行人推自行车斜穿马路时,系统因超出预设场景而漏检。
- SOTIF应对策略:
- 扩展场景边界:通过仿真平台生成“行人异常行为”的百万级虚拟测试用例
- 人机共驾设计:在系统响应延迟临界值时,提前触发驾驶员接管预警
- 动态风险评估:结合高精地图预判施工路段,自动降低车速
技术路径:
- 场景库构建:基于自然驾驶数据(NDS)提取“长尾场景”特征
- 鲁棒性测试:通过对抗性样本(如雨天模糊图像)验证算法容错能力
- 驾驶员行为建模:利用眼动追踪技术优化接管提示逻辑
三、网络安全(Cybersecurity):抵御外部的“恶意入侵”
定义:网络安全聚焦于人为故意攻击导致的系统风险,涵盖车载网络、通信协议、软件固件等层面的防护,遵循ISO/SAE 21434标准。
典型威胁场景:
| 攻击类型 | 技术手段 | 后果示例 |
|---|---|---|
| 车载网络渗透 | 通过OBD接口注入CAN总线恶意指令 | 远程控制刹车/转向系统 |
| 通信劫持 | 伪造V2X消息诱导车辆碰撞 | 高速公路连环追尾 |
| 固件篡改 | 植入后门程序绕过安全认证 | 窃取用户隐私数据或解锁限制功能 |
防御体系构建:
- 分层防护架构:
- 边界防护:车载防火墙隔离娱乐系统与控制总线
- 身份认证:基于PKI的ECU固件签名与密钥管理
- 入侵检测:实时监控CAN总线异常流量(如超过阈值的高频指令)
- 实战案例:奔驰DRIVE PILOT L3系统通过安全启动(Secure Boot)和持续完整性验证(CIV),确保自动驾驶控制单元不受供应链攻击影响。
四、三位一体的安全矩阵:关系图谱与协同机制
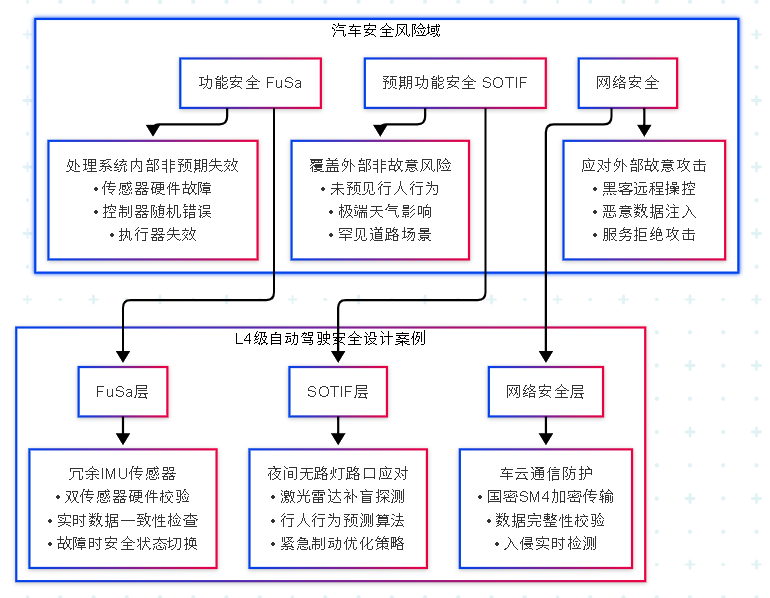
FuSa/SOTIF/网络安全的风险域划分及协同案例:
图1:FuSa/SOTIF/网络安全的风险域划分
图表说明:
- 风险域划分部分(上部):
- 三个主要风险域垂直排列,每个域包含具体风险示例
- FuSa:橙色框,聚焦内部系统失效
- SOTIF:蓝色框,处理外部非故意风险
- 网络安全:紫色框,防御外部故意攻击
- 协同案例部分(下部):
- 采用水平布局展示L4系统的三重防护实现
- 每个安全层对应具体技术措施:
- FuSa层:传感器冗余与校验
- SOTIF层:场景化算法优化
- 网络安全层:加密通信防护
- 连接关系:
- 箭头明确显示三类风险域到具体实施方案的映射关系
| 安全层级 | 技术措施 | 实现原理 | 防护目标 |
|---|---|---|---|
| FuSa层 | 冗余IMU传感器 | • 双传感器并行采集 • 硬件级数据校验 • 故障时梯度降级 | 确保车辆姿态数据准确性 (ASIL-D等级要求) |
| SOTIF层 | 激光雷达补盲+算法优化 | • 增加侧向探测点云密度 • 行人轨迹预测模型 • 紧急制动边界控制 | 提升"夜间无路灯路口"场景下 行人检测率至99.3% |
| 网络安全层 | 国密SM4加密 | • 端到端加密传输 • 数字签名验证 • 密钥动态轮换 | 防止实时路况数据被篡改 (满足ISO/SAE 21434) |
- FuSa:处理“系统内部非预期失效”(如传感器硬件故障)
- SOTIF:覆盖“外部非故意风险”(如模型未预见的行人行为)
- 网络安全:应对“外部故意攻击”(如黑客远程操控)
协同案例:某L4级自动驾驶系统的安全设计:
- FuSa层:冗余IMU传感器通过硬件校验确保姿态数据准确性
- SOTIF层:针对“夜间无路灯路口行人突然冲出”场景,通过激光雷达补盲与算法优化提升检测率
- 网络安全层:车云通信采用国密SM4加密,防止攻击方篡改实时路况数据
五、行业挑战与未来趋势
1. 长尾场景的“熵增困境”
- 即使通过数据闭环持续迭代,未知不安全场景(图2区域3)仍无法完全消除,需结合V2X车路协同扩大感知边界,通过混合增强智能融合人类驾驶经验。

图2:自动驾驶场景的认知-安全矩阵 (来自参考资料)
| 区域 | 场景特征 | 典型案例 | 安全挑战 | 文章关联策略 |
|---|---|---|---|---|
| 1 | 已知安全场景(高认知+高安全) | 晴天城市道路行人正常过街 | 无显著风险 | FuSa硬件冗余+SOTIF基础测试 |
| 2 | 已知不安全场景(高认知+低安全) | 夜间无照明路口电动车穿行 | 算法局限性导致漏检 | 影子模式数据采集+模型优化 |
| 3 | 未知不安全场景(低认知+低安全) | 暴雨天隧道内积水+后方车辆突然变道 | 场景不可预测性 | V2X车路协同+混合接管 |
| 4 | 未知安全场景(低认知+高安全) | 新型智能交通信号系统区域通行 | 场景探索成本高 | 仿真平台生成虚拟场景验证 |
- 区域3(核心矛盾点):对应文中“未知不安全场景”,强调通过V2X车路协同(如路侧单元实时传递积水信息)和混合增强智能(如人类驾驶经验注入算法)突破认知边界。
- 动态演进逻辑:通过“数据闭环”推动场景从区域3→2→1转化,体现安全体系的持续迭代性。
2. 标准化与工具链革新
- 新兴标准如ISO 26262:2023(第二版)强化了SOTIF与FuSa的协同要求
- 仿真测试平台(如ANSYS VRXPERIENCE)正集成“功能安全测试-场景生成-网络攻击模拟”的一体化解决方案
六、评估汽车安全系统的性能和效果
评估汽车安全系统的性能和效果需覆盖**功能安全(FuSa)、预期功能安全(SOTIF)、网络安全(Cybersecurity)**三大领域,结合行业标准、测试方法论和量化指标,形成全生命周期的验证体系。以下是具体评估框架与实施要点:
功能安全(FuSa)评估:基于ISO 26262的系统性验证
核心目标:验证电子电气系统是否满足故障预防与控制要求,确保ASIL等级合规。
1. 开发流程合规性
- 评估维度:
- 遵循ISO 26262的V模型开发流程,覆盖概念阶段、系统设计、硬件/软件开发、测试验证
- 安全计划、危害分析与风险评估(HARA)、安全需求规范的完整性
- 工具与方法:
- 审查文档:安全案例(Safety Case)、FMEA(失效模式与影响分析)、FTA(故障树分析)
- 示例:某车企对ESP系统进行FMEA,识别出12个潜在硬件失效点,通过冗余设计将单点故障概率降至10⁻⁷/h以下
2. 技术实现验证
- 硬件评估:
- 故障注入测试:通过HiL(硬件在环)平台模拟传感器故障、电源波动等场景,验证冗余切换逻辑
- 指标:硬件随机失效概率(PMHF)、安全机制覆盖率
- 软件评估:
- 代码静态分析:使用Coverity等工具检测代码缺陷(如缓冲区溢出、竞态条件)
- 动态测试:通过SiL(软件在环)验证安全功能响应时间(如紧急制动系统需在200ms内触发)
3. 量产一致性管控
- 生产线功能安全测试:对ECU进行100%在线诊断,确保硬件装配无缺陷
- 售后数据监控:通过OTA收集故障码,分析现场失效模式与开发阶段预测的吻合度
预期功能安全(SOTIF)评估:突破“已知边界”的场景化验证
核心目标:评估系统在预期功能范围内的安全性,识别性能局限与合理可预见的误用风险(ISO 21448)。
1. 场景库构建与风险分级
- 场景来源:
- 自然驾驶数据(NDS):通过路测采集“行人鬼探头”“施工路段绕行”等长尾场景
- 威胁分析(TARA):识别“驾驶员误触自动驾驶开关”“恶劣天气传感器失效”等误用场景
- 风险矩阵:
| 危害等级\发生概率 | 高(频繁出现) | 中(偶发) | 低(罕见) |
|---|---|---|---|
| 高(威胁生命安全) | 高风险区 - 场景:行人鬼探头 - 应对:强制优先验证,需100%覆盖测试 | 中风险区 - 场景:施工路段绕行误判 - 应对:仿真测试+高精地图联动 | 低风险区 - 场景:高速路突发障碍物 - 应对:冗余传感器+紧急制动备份 |
| 中(重伤/财产损失) | 中风险区 - 场景:恶劣天气传感器失效 - 应对:多传感器融合校验 | 中风险区 - 场景:驾驶员误触自动驾驶开关 - 应对:防误触设计+接管提示优化 | 极低风险区 - 场景:非常规路口交通规则误判 - 应对:边缘场景数据标注 |
| 低(轻微影响) | 低风险区 - 场景:拥堵路段跟车距离过近 - 应对:算法阈值调整 | 低风险区 - 场景:阳光直射导致摄像头过曝 - 应对:动态白平衡算法优化 | 极低风险区 - 场景:罕见车型识别错误 - 应对:开放数据平台众包标注 |
按场景发生概率(横轴)与危害等级(纵轴)划分优先级
优先级排序:
- 高风险区(左上):如“行人鬼探头”(高概率+高危害),需通过10万次以上仿真测试+封闭场地实测验证避撞逻辑。
- 极低风险区(右下):如“野生动物闯入高速路”(低概率+高危害),可通过场景生成算法模拟验证,无需全量路测。
如需调整场景案例或量化概率区间(如定义“高概率”为≥1次/千公里),可提供具体数据标准进一步优化。
2. 多阶段测试体系
- 仿真测试:
- 使用CARLA、PreScan等平台生成百万级虚拟场景,验证算法鲁棒性
- 示例:对自动泊车系统模拟“车位线模糊+后方突然来车”场景,测试避撞逻辑
- 封闭场地测试:
- 构建极端物理场景(如暴雨天低光照、弯道积水),评估传感器融合精度
- 公开道路测试:
- 影子模式(Shadow Mode)采集真实场景数据,对比系统决策与人类驾驶的差异率
3. 量化评估指标
- 场景覆盖率:已验证场景数/总场景数(目标:≥95%已知风险场景)
- 误报率/漏报率:传感器或算法在复杂场景中的错误响应频率
- 接管成功率:驾驶员在系统提示后完成接管的时间与成功率
网络安全(Cybersecurity)评估:抵御动态攻击的攻防验证
核心目标:确保车载系统抵御外部恶意攻击,符合ISO/SAE 21434标准。
1. 攻击面分析
- 识别暴露点:车载网络接口(CAN/LIN/Ethernet)、通信协议(如DoIP、UDS)、外部连接(WiFi/蓝牙/OTA)
- 示例:通过渗透测试发现某车型OBD接口未加密,攻击者可通过USB设备注入CAN指令控制车门
2. 攻防测试方法论
- 白盒测试:
- 代码审计:检查加密算法实现漏洞(如弱密钥协商)
- 安全协议验证:分析V2X消息签名机制是否抗重放攻击
- 黑盒测试:
- 模糊测试(Fuzzing):向ECU发送随机畸形数据,检测缓冲区溢出漏洞
- 实战演练:模拟黑客通过车载WiFi接入娱乐系统,尝试横向渗透至底盘控制域
3. 持续监控与响应
- 车载入侵检测系统(IVS):实时监控总线异常流量(如非授权ECU通信)
- 漏洞管理流程(VDP):建立CVE漏洞库,定期更新安全补丁(如特斯拉季度OTA修复远程控制漏洞)
- 指标:平均漏洞修复时间(MTTR)、攻击成功概率(通过攻防演练量化)
跨领域协同评估:构建“三位一体”安全闭环
1. 集成测试场景
| 安全领域 | 测试用例 | 协同验证点 |
|---|---|---|
| FuSa+SOTIF | 传感器硬件失效+复杂场景(如雷达盲区行人横穿) | 冗余传感器能否弥补算法漏检 |
| SOTIF+网络安全 | 伪造V2X消息诱导系统进入“已知不安全场景”(如虚假限速标志) | 通信加密能否防止场景误判 |
| 全领域 | 模拟“ECU硬件故障+黑客篡改传感器数据+未知施工场景”的多重风险叠加 | 安全机制是否触发多级防护(如冗余切换+入侵检测+接管提示) |
2. 数据驱动的持续优化
- 建立安全绩效指标(SPI)体系:
- 功能安全:硬件故障率、安全机制误触发率
- SOTIF:长尾场景发现速率、算法迭代前后的风险降低率
- 网络安全:漏洞修复及时率、零日漏洞(0-Day)检测时间
- 通过车云数据闭环,将路测中发现的新风险(如新型攻击手法、未覆盖场景)反馈至开发端,形成“评估-迭代-再评估”的正向循环
行业挑战与前沿技术
1. 长尾场景的评估瓶颈
- 解决方案:
- 基于生成式AI(如GPT-4)自动生成“低概率高风险”场景,扩展测试边界
- 联邦学习技术:在保护隐私的前提下,聚合多车企数据构建更全面的场景库
2. AI系统的安全评估
- 针对深度学习模型的不可解释性,引入**可解释AI(XAI)**技术:
- 通过注意力机制可视化,验证模型决策是否依赖关键特征(如行人位置、车辆速度)
- 对抗性鲁棒性评估:使用FGSM等攻击算法测试模型对微小扰动的容忍度
3. 标准化进展
- ISO 26262 Part 10(草案)拟新增AI系统安全评估指南,要求:
- 模型训练数据的多样性与代表性验证
- 部署后持续监控模型漂移(Drift)的机制
总结:从“合规验证”到“风险量化”的范式升级
汽车安全系统的评估已从“满足标准条款”转向“量化风险控制”,需建立**“开发阶段全流程验证+量产阶段持续监控+生态协同数据共享”的立体评估体系。未来,随着ISO 21448与ISO/SAE 21434的深度落地,安全评估将更依赖数据智能、仿真技术与跨行业协同**,最终实现从“被动防御”到“主动预测”的质变,为L4+自动驾驶的商业化铺就安全基石。
结语:安全是自动驾驶的基石
从Uber事故到特斯拉的影子模式(Shadow Mode),行业逐渐意识到:FuSa是安全的“底线”,SOTIF是安全的“弹性边界”,网络安全是安全的“防御盾牌”。随着ISO 21448与ISO/SAE 21434的落地,汽车安全正从“合规驱动”转向“风险量化驱动”。未来,唯有构建“动态迭代的安全体系+开放协同的生态”,才能在自动驾驶的“熵增”挑战中持续“减熵”,让安全成为技术落地的基石而非枷锁。
参考资料: https://www.laitimes.com/zh/article/1fi2k_1h8pr.html