引言 ——
为什么我们需要“抗折腾”的系统?
当你乘坐的飞机穿越雷暴区时机体剧烈颠簸,自动驾驶汽车在暴雨中稳稳避开障碍物,或是手机从口袋摔落后依然流畅运行——这些场景背后,都藏着一个工程领域的“隐形守护者”:鲁棒性(Robustness)。
在充满不确定性的现实世界中,完美的输入、理想的环境、永恒的稳定性不过是实验室里的童话。鲁棒性,正是系统面对参数漂移、数据噪声、意外冲击时的“生存智慧”。它让桥梁抵抗强震,让AI无视对抗攻击,让软件在错误输入中优雅复原。
本文将揭开鲁棒性的多层内核:从稳如磐石的控制系统到抗干扰的AI模型,从量化测试方法论到医疗诊断AI的实战优化案例。你会看到,鲁棒性不仅是技术术语,更是数字时代系统设计的生存法则。
概念 ——
“鲁棒性”是英文 Robustness 的音译,在中文里也常被意译为“健壮性”或“稳健性”。它是一个非常重要的概念,广泛应用于工程学、计算机科学、统计学、控制理论、经济学等多个领域。
鲁棒性指的是一个系统、模型、算法或方法在面对内部参数变化、外部扰动、输入不确定性、噪声、故障或异常情况时,保持其原有功能和性能稳定性的能力。
简单来说,一个鲁棒的系统/事物是:
-
不容易坏掉的: 能承受一定的压力、冲击或错误。
-
适应性强的: 在条件发生变化时,仍然能正常工作或产生可接受的结果。
-
可靠的: 即使在非理想或意外情况下,也能表现良好。
-
抗干扰的: 对外部噪声或输入中的小错误不敏感。
—— —— —— —— —— ——
P.s: 这样听起来跟稳定性真的好像啊!但是作者文献读下来这俩还是有一定去别的,主要是侧重点不一样(而且某种程度上鲁棒性包含稳定性),作者总结了一下,区别如下:
1. 核心定义不同
-
稳定性(Stability)
关注系统状态是否会收敛到期望的平衡点(或目标轨迹)。-
一个稳定系统在受到有限扰动后,其输出或状态最终会回到平衡状态(如静止点或周期性运动),不会无限发散或持续振荡。
-
核心问题: 系统是否“失控”?
-
典型场景: 倒立摆能否保持直立?电路电压是否会振荡爆炸?
-
-
鲁棒性(Robustness)
关注系统在存在不确定性(扰动、噪声、参数变化等)时,能否维持预期性能(包括稳定性)。-
一个鲁棒系统在模型不精确、外部干扰、参数漂移等情况下,仍能保持稳定性、精度、响应速度等性能指标。
-
核心问题: 系统在“不完美条件”下是否还能“正常工作”?
-
典型场景: 自动驾驶在暴雨中能否稳定控制车辆?机器人手臂负载突变时能否精准定位?
-
2. 核心目标不同
| 特性 | 稳定性 | 鲁棒性 |
|---|---|---|
| 核心目标 | 确保系统不发散 | 确保系统抗干扰能力强 |
| 衡量焦点 | 状态是否收敛到平衡点 | 性能指标(如误差、精度)对扰动的敏感度 |
| 关键要求 | 动态过程收敛(数学上严格) | 在不确定性下保持功能可靠 |
作用 ——
为什么鲁棒性重要?
现实世界充满了不确定性和变化:
-
输入数据可能不完美或有噪声(如传感器误差、用户错误输入)。
-
系统组件可能老化、磨损或发生故障。
-
运行环境可能发生变化(如温度、湿度、电磁干扰)。
-
模型假设可能不完全符合现实。
一个鲁棒的设计可以确保系统在这些情况下不会完全崩溃,性能不会急剧下降,或者产生灾难性的错误,从而提高系统的可靠性、安全性和可用性。
—— —— —— —— —— ——
Question: 如何提高鲁棒性?
提高鲁棒性的策略因领域而异,但一些常见方法包括:
-
冗余设计: 增加备用组件或路径(如飞机的多个引擎)。
-
容错设计: 系统能够检测错误并自动纠正或隔离故障部分。
-
反馈控制: 根据输出结果实时调整系统行为以抵抗干扰(闭环控制比开环控制更鲁棒)。
-
使用鲁棒的算法/方法: 选择对噪声和异常值不敏感的统计方法或机器学习模型。
-
边界检查和输入验证: 在软件中严格检查输入数据的有效性和范围。
-
错误处理和异常捕获: “优雅地”处理软件运行中的意外情况。(p.s: 简单来说就是在系统炸了崩了404之前,设置一个一场抓取啊或者系统的错误自处理,这样有更长的修改时间,紧急性也更弱一点,自然就优雅一些hhh)
-
压力测试和边界测试: 在极端或异常条件下测试系统。
-
模型正则化: 在机器学习中防止模型过拟合,提高泛化能力。
应用场景 ——
鲁棒性在不同领域的应用举例:
-
工程与控制系统:
-
一座设计鲁棒的桥梁能承受超出设计预期的风力或地震。
-
一个鲁棒的自动驾驶系统能在雨雪天气、传感器部分失灵或遇到意外障碍物时,仍然保持车辆的安全控制。
-
一个鲁棒的机器人控制器能在负载变化或关节轻微磨损时,仍然精确地完成任务。
-
-
计算机科学与软件工程:
-
软件鲁棒性: 程序能处理各种边界条件、无效输入(如用户输入了字母而非数字)、文件不存在、网络中断等情况,而不会崩溃或产生不可预料的结果(例如“蓝屏死机”就是缺乏鲁棒性的表现)。良好的错误处理和异常捕获机制是提高软件鲁棒性的关键。
-
网络鲁棒性: 互联网或通信网络在部分节点或链路故障时,仍能通过其他路径维持基本通信能力。
-
算法鲁棒性: 一个机器学习算法在训练数据包含噪声或异常值时,仍能学习到有效的模式,而不会过度拟合这些噪声点。
-
安全鲁棒性: 系统能够抵抗一定程度的安全攻击(如DDoS攻击)。
-
-
统计学与机器学习:
-
统计方法的鲁棒性: 某些统计方法(如中位数 vs 均值)对数据中的离群值不敏感。一个鲁棒的统计方法在数据不完全符合假设(如正态分布)或包含异常值时,其估计结果仍然是可靠和有意义的。
-
机器学习模型的鲁棒性: 训练好的模型在面对新的、略有不同的数据分布、对抗性攻击(精心设计的输入以欺骗模型)或输入噪声时,仍能保持较高的预测准确性。
-
-
经济学与金融:
-
经济模型的鲁棒性: 一个经济模型在关键参数发生变化或模型假设不完全成立时,其结论和政策建议是否仍然成立。
-
投资策略的鲁棒性: 一个投资策略在不同的市场环境(牛市、熊市、震荡市)下是否都能取得相对稳定的收益。
-
测试流程 ——
Question:如何测试鲁棒性?
主动制造“混乱”
目标是主动引入不确定性,验证系统在异常条件下的表现。
1. 定义鲁棒性目标与指标
-
明确关键场景:哪些扰动最重要?(如输入错误、网络延迟、传感器故障、参数漂移)
-
量化性能指标:响应时间、误差范围、崩溃率、恢复时间等。
-
设定容忍阈值:例如:“CPU占用率突增50%时,响应延迟不超过200ms”。
2. 识别潜在脆弱点
-
FMEA(失效模式与影响分析):系统化分析组件失效的可能性及影响。
-
边界分析:输入范围边界(如最大值/最小值)、状态切换点(如登录/注销)。
-
依赖分析:外部服务、硬件、第三方库的故障影响。
3. 设计扰动测试用例
| 扰动类型 | 测试方法举例 |
|---|---|
| 输入扰动 | 注入无效数据、空值、超长字符串、特殊字符、格式错误数据 |
| 环境扰动 | 模拟高温/低温、电压波动、网络丢包/延迟、时钟漂移 |
| 资源扰动 | 强制内存耗尽、CPU 过载、磁盘空间不足、线程阻塞 |
| 组件故障 | 杀死关键进程、断开数据库连接、模拟传感器失效 |
| 模型不确定性 | 测试数据分布偏移(如训练集vs真实数据)、对抗样本攻击(针对AI模型) |
| 并发与时序扰动 | 高并发请求、竞争条件、事件乱序 |
4. 实施测试工具与技术
-
故障注入(Fault Injection):
-
硬件:电磁干扰、电源抖动
-
软件:Chaos Engineering(混沌工程)工具(如 Chaos Monkey, Gremlin)
-
-
模糊测试(Fuzzing):自动生成随机或半随机输入轰炸系统(如 AFL, libFuzzer)。
-
压力测试 & 负载测试:超出设计容量的请求(如 10倍正常流量)。
-
边界测试:针对参数边界值(0、NULL、最大值)的极端输入。
-
蒙特卡洛仿真:随机组合多种扰动参数,评估统计鲁棒性。
5. 监控与记录
-
部署实时监控:日志、性能指标(CPU/内存)、错误率、自动化告警。
-
记录故障传播路径:扰动如何导致系统失效?(如:输入错误 → 服务崩溃 → 雪崩效应)
具体案例下的应用示例 ——
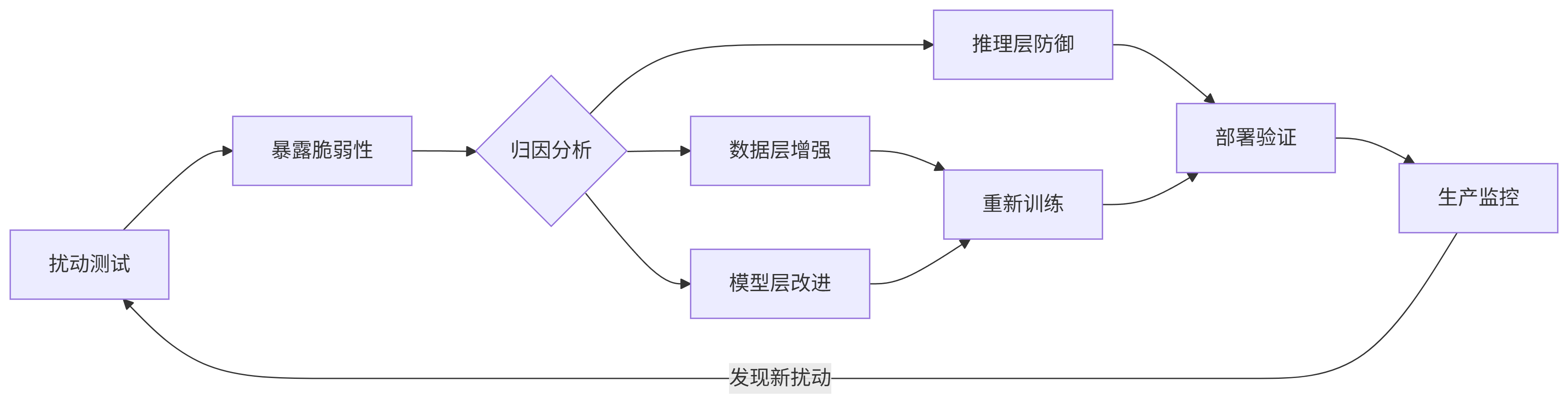
鲁棒性迭代“进化”

关键迭代原则
-
从小扰动开始:先测试单点故障,逐步叠加复杂扰动。
-
生产环境验证:在可控范围实施混沌工程(如 Netflix 的“故障注入测试”)。
-
自动化回归:将鲁棒性测试纳入CI/CD流水线(如每次提交自动运行Fuzzing)。
-
量化改进:对比调整前后的指标(如故障恢复时间缩短50%)。
—— —— —— —— —— ——
案例背景
-
任务:二分类模型(肺炎/正常)
-
基线模型:ResNet50,在测试集上准确率95%
-
暴露问题:
实际部署中发现,当输入图像存在设备差异、轻微运动模糊或低对比度时,误诊率急剧上升。
步骤1:定量测试——设计扰动实验与指标
1.1 定义扰动类型与强度
| 扰动类型 | 模拟场景 | 扰动参数 |
|---|---|---|
| 高斯噪声 | 低质量传感器成像 | 噪声方差σ∈[0.01, 0.05] |
| 运动模糊 | 患者轻微移动 | 模糊核大小k∈[3, 15]像素 |
| 对比度下降 | 设备校准偏差 | 对比度缩放因子c∈[0.3, 0.7] |
| 亮度不均匀 | X光机光源老化 | 梯度亮度变化Δ∈[10%, 40%] |
| 对抗样本攻击 | 恶意篡改影像 | FGSM攻击强度ε∈[0.01, 0.05] |
1.2 量化测试指标
-
核心性能:准确率(Accuracy)、AUC-ROC
-
鲁棒敏感性:
-
性能衰减率:$\text{衰减率} = \frac{\text{纯净数据性能} - \text{扰动数据性能}}{\text{纯净数据性能}}$
-
假阴性率(FNR):漏诊肺炎的风险(医疗场景关键指标)
-
置信度偏移:模型对扰动样本预测置信度的标准差
-
1.3 测试结果(示例)
| 扰动类型 | 准确率下降 | FNR上升 | 置信度偏移 |
|---|---|---|---|
| 纯净数据 | 0% | 5% | 0.02 |
| 运动模糊 (k=11) | 22% | 28% | 0.31 |
| 对比度下降 (c=0.4) | 18% | 23% | 0.25 |
| 对抗攻击 (ε=0.03) | 41% | 49% | 0.52 |
结论:模型对运动模糊和对抗攻击极度敏感,可能导致临床漏诊。
步骤2:定性分析——定位脆弱性根源
2.1 可视化分析
-
Grad-CAM热力图:
-
纯净样本:模型关注肺部纹理(正确)
-
运动模糊样本:关注区域扩散到胸腔骨骼(噪声干扰)
-
对抗样本:关注点完全偏离肺部(被攻击误导)
-
2.2 归因分析
| 脆弱性根源 | 证据 |
|---|---|
| 过度依赖高频特征 | 对模糊敏感,因模型依赖边缘细节而非病理结构 |
| 缺乏空间不变性 | 亮度不均匀时,同一病理特征在不同位置置信度差异大 |
| 对抗脆弱性 | 决策边界过于接近数据点,微小扰动即可跨域 |
步骤3:调整模型——针对性优化策略
3.1 增强数据鲁棒性
| 方法 | 实现 | 目的 |
|---|---|---|
| 物理模拟数据增强 | 生成带运动模糊、噪声的合成X光片(物理成像模型) | 覆盖设备差异 |
| 对抗训练 | 将FGSM对抗样本加入训练集 | 提升对抗鲁棒性 |
| 域随机化 | 随机组合多种扰动参数生成训练数据 | 强迫学习不变性特征 |
3.2 模型架构改进
| 方法 | 实现 |
|---|---|
| 正则化 | 添加随机裁剪(RandAugment) + MixUp混合样本 |
| 特征解耦 | 增加辅助分支预测扰动类型(多任务学习),强制主干网络忽略扰动相关特征 |
| 鲁棒损失函数 | 用Huber Loss替代交叉熵(降低异常样本影响) |
3.3 推理防御机制
# 示例:添加预处理模块
def robust_inference_pipeline(image):
image = contrast_limited_adaptive_histogram(image) # 自适应对比度均衡
if detect_motion_blur(image): # 模糊检测
image = deblur_using_wiener_filter(image) # 维纳滤波去模糊
return model.predict(image)步骤4:优化效果验证
4.1 定量结果对比
| 扰动类型 | 原模型FNR | 优化后FNR | 改进幅度 |
|---|---|---|---|
| 运动模糊 (k=11) | 28% | 9% | ↓19% |
| 对抗攻击 (ε=0.03) | 49% | 15% | ↓34% |
| 对比度下降 (c=0.4) | 23% | 8% | ↓15% |
4.2 定性改进
-
热力图稳定性:
-
优化后模型在扰动下仍聚焦肺部病变区域
-
-
置信度分布:
-
扰动样本预测置信度标准差从0.31→0.08(更稳定)
-
4.3 鲁棒性-性能权衡
-
纯净数据准确率:95% → 93.5%(牺牲1.5%精度)
-
关键指标增益:漏诊率(FNR)从平均20%→7%
医疗价值结论:以微小精度代价换取临床安全性显著提升 → 鲁棒性优化成功
结束语: "鲁棒性——在不确定中寻找确定性"
鲁棒性的终极目标,不是追求绝对完美的性能,而是在混沌中守护功能的底线。正如医疗AI通过对抗训练将漏诊率降低76%的案例所示,鲁棒性优化往往意味着以微小精度换取巨大可靠性——这种权衡在关乎生命的系统中,价值远超任何技术指标。
当我们谈论自动驾驶在暴雨中的稳定性、电网应对突发负载的韧性,或是软件处理异常输入的从容,本质上都在实践同一种哲学:承认世界的不完美,并为之设计容错空间。
未来的技术进化,必将在鲁棒性前沿展开更深层探索:从抵御已知扰动,到预判“未知的未知”;从单点加固,到系统级抗脆弱架构。而这一切的起点,在于理解一个朴素真理——
真正强大的系统,不是永不跌倒,而是跌倒后总能以最小代价站起,并记住如何避开下一块绊脚石。