DanceGRPO: Unleashing GRPO on Visual Generation
-
原文摘要
-
研究背景与问题
- 生成模型的突破:扩散模型和整流流等生成模型在视觉内容生成领域取得了显著进展。
- 核心挑战:如何让模型的输出更好地符合人类偏好仍是一个关键问题。
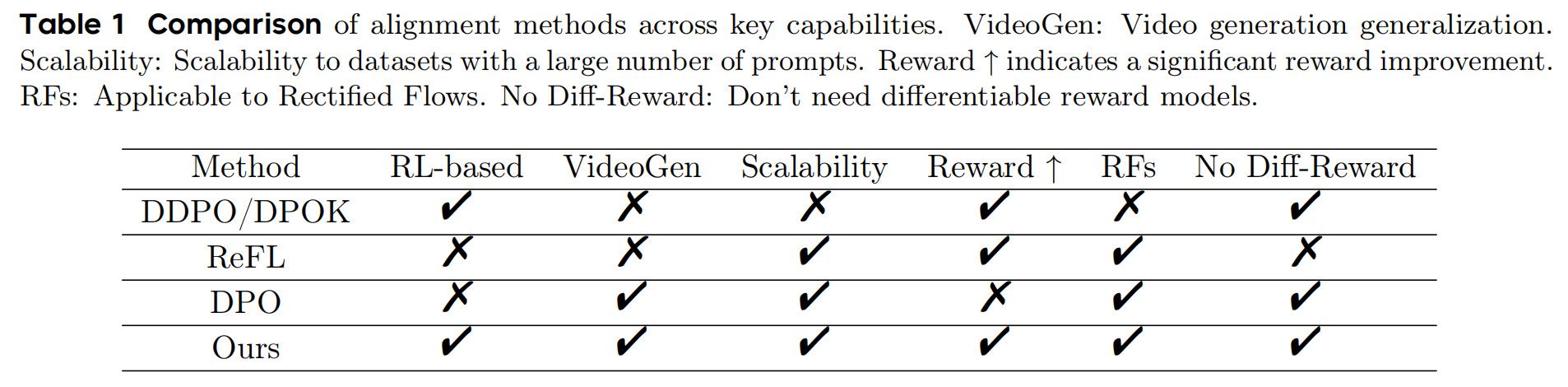
- 现有方法的局限性:
- 兼容性问题:传统的基于强化学习(RL)的方法无法与现代基于常微分方程(ODE)的采样范式兼容。
- 训练不稳定:在大规模训练中容易出现不稳定性。
- 缺乏验证:现有方法在视频生成任务上缺乏验证。
-
提出的解决方案:DanceGRPO
-
DanceGRPO 是第一个将 GRPO 应用于视觉生成的统一框架
-
统一性:支持多种生成范式(扩散模型、整流流)、任务(文本生成图像/视频、图像生成视频)、基础模型(如 Stable Diffusion、HunyuanVideo 等)和奖励模型(如美学评分、文本对齐、视频运动质量等)。
-
-
技术优势
- 稳定性:在复杂的视频生成任务中稳定策略优化。
- 轨迹学习:帮助生成策略更好地捕捉去噪轨迹(denoising trajectories),从而支持 Best-of-N 推理(即从多个生成结果中选择最优输出)。
- 稀疏反馈学习:能够从稀疏的二元反馈中学习。
-
实验结果
- 性能提升:在多个基准测试上显著超过基线方法,最高提升达 181%。
- 广泛验证:覆盖了多种任务、模型和奖励机制,证明了其鲁棒性和通用性。
-
研究意义
- 为 RLHF 提供新思路:DanceGRPO 为视觉生成领域的 RLHF 提供了可扩展且通用的解决方案。
- 调和 RL 与视觉生成:揭示了强化学习与视觉合成之间的协同潜力,为未来研究提供了新方向。
-
1. Introduction
-
研究背景与现状
-
生成模型的进展
- 扩散模型 和 整流流取得突破性进展,显著提升了图像/视频生成的质量和多样性。
- 预训练虽能建立基础数据分布,但人类反馈的整合对对齐生成结果与人类偏好至关重要。
-
现有方法的局限性
-
ReFL方法:依赖可微奖励模型,导致视频生成中显存(VRAM)效率低下,且工程实现复杂。
-
DPO系列方法:仅能带来边际视觉质量提升。
-
基于RL的方法虽具潜力,但存在三大挑战:
- 整流流的ODE采样与马尔可夫决策过程(MDP)的数学形式冲突;
- 现有策略梯度方法在小规模数据集(<100 prompts)外表现不稳定;
- 现有方法未在视频生成任务中得到验证。
-
-
-
解决方案
-
技术路径
-
通过随机微分方程(SDEs)重新形式化扩散模型和整流流的采样过程。
-
引入GRPO稳定训练——GRPO原是提升大语言模型(LLMs)在数学/代码等复杂任务性能的技术,本文首次将其适配到视觉生成任务,提出DanceGRPO框架,实现GRPO与视觉生成的“和谐协同”。
-
-
-
贡献总结
-
统一性与首创性
- 首次将GRPO扩展到扩散模型和整流流,在统一RL框架下支持多视觉生成任务。
- 关键实现:SDE重构、优化时间步选择、噪声初始化与尺度调整。
-
泛化性与可扩展性
-
DanceGRPO是首个支持多生成范式、任务、基础模型和奖励模型的RL框架。
-
突破此前RL方法仅在小规模文本→图像任务验证的局限,证明其在大规模数据集的实用价值。
-
-
高效性
-
实验显示:在HPSv2.1、CLIP score等基准上,性能最高提升181%。
-
额外能力:
- 支持Best-of-N推理中的去噪轨迹学习;
- 初步验证对稀疏二元奖励(0/1反馈)分布的捕捉能力。
-
-
2. Approach
2.1 Preliminary
-
Diffusion Model
-
前向过程
- 核心公式:
z
t
=
α
t
x
+
σ
t
ϵ
z_t = \alpha_t x + \sigma_t \epsilon
zt=αtx+σtϵ, 其中
ϵ
∼
N
(
0
,
I
)
\epsilon \sim \mathcal{N}(0, I)
ϵ∼N(0,I)
- 变量说明:
- x x x:原始数据。
- z t z_t zt:第 t t t 步加噪后的数据。
- α t , σ t \alpha_t, \sigma_t αt,σt:噪声调度系数(控制噪声混合比例)。
- ϵ \epsilon ϵ:标准高斯噪声(均值为0,方差为1)。
- 意义: 通过线性混合原始数据
x
x
x 和噪声
ϵ
\epsilon
ϵ,逐步破坏数据。噪声调度设计需满足:
- t = 0 t=0 t=0 时 z 0 ≈ x z_0 \approx x z0≈x(接近干净数据)。
- t = 1 t=1 t=1 时 z 1 ≈ ϵ z_1 \approx \epsilon z1≈ϵ(接近纯噪声)。
- 变量说明:
- 核心公式:
z
t
=
α
t
x
+
σ
t
ϵ
z_t = \alpha_t x + \sigma_t \epsilon
zt=αtx+σtϵ, 其中
ϵ
∼
N
(
0
,
I
)
\epsilon \sim \mathcal{N}(0, I)
ϵ∼N(0,I)
-
反向去噪
-
生成初始化: 从纯噪声 z 1 ∼ N ( 0 , I ) z_1 \sim \mathcal{N}(0, I) z1∼N(0,I) 开始,逐步去噪生成样本。
-
关键公式: z s = α s x ^ + σ s ϵ ^ z_s = \alpha_s \hat{x} + \sigma_s \hat{\epsilon} zs=αsx^+σsϵ^
- 变量说明:
- ϵ ^ \hat{\epsilon} ϵ^:去噪模型预测的噪声。
- x ^ \hat{x} x^:去噪模型预测的原始数据
- s s s:比当前步 t t t 更低的噪声级别。
- 意义: 通过去噪模型预测噪声 ϵ ^ \hat{\epsilon} ϵ^,结合噪声调度系数 α s , σ s \alpha_s, \sigma_s αs,σs,生成更低噪声级别的数据 z s z_s zs。
- 变量说明:
-
-
-
Rectified Flow
-
前向过程
- 核心公式:
z
t
=
(
1
−
t
)
x
+
t
ϵ
,
ϵ
∼
N
(
0
,
I
)
z_t = (1 - t)x + t \epsilon, \quad \epsilon \sim \mathcal{N}(0, I)
zt=(1−t)x+tϵ,ϵ∼N(0,I)
- t t t :时间步( t ∈ [ 0 , 1 ] t \in [0, 1] t∈[0,1]),控制插值比例。
- 核心公式:
z
t
=
(
1
−
t
)
x
+
t
ϵ
,
ϵ
∼
N
(
0
,
I
)
z_t = (1 - t)x + t \epsilon, \quad \epsilon \sim \mathcal{N}(0, I)
zt=(1−t)x+tϵ,ϵ∼N(0,I)
-
速度场(Velocity Field)
- 定义:
u
=
ϵ
−
x
u = \epsilon - x
u=ϵ−x
- 解释:
- u u u 表示从数据 x x x 到噪声 ϵ \epsilon ϵ 的方向向量(即“速度场”)。
- 前向过程可重写为 z t = x + t ⋅ u z_t = x + t \cdot u zt=x+t⋅u,即沿速度场线性移动。
- 解释:
- 定义:
u
=
ϵ
−
x
u = \epsilon - x
u=ϵ−x
-
反向过程
-
核心公式: z s = z t + u ^ ⋅ ( s − t ) , s < t z_s = z_t + \hat{u} \cdot (s - t), \quad s < t zs=zt+u^⋅(s−t),s<t
-
u ^ \hat{u} u^:模型预测的速度场。
-
意义: 通过模型预测 u ^ \hat{u} u^,从当前状态 z t z_t zt 反向沿速度场移动,生成更低噪声的 z s z_s zs。
- 若 u ^ = u \hat{u} = u u^=u,则完美逆转前向过程(即 z s = x + s ⋅ u z_s = x + s \cdot u zs=x+s⋅u)。
-
-
-
-
分析:两种方法具有统一的形式
-
数学表达 z ~ s = z ~ t + Network output ⋅ ( η s − η t ) \tilde{z}_s = \tilde{z}_t + \text{Network output} \cdot (\eta_s - \eta_t) z~s=z~t+Network output⋅(ηs−ηt)
- z ~ s , z ~ t \tilde{z}_s, \tilde{z}_t z~s,z~t:变换后的状态变量。
-
Network output \text{Network output} Network output:模型输出(噪声预测或速度场预测)。
-
η s , η t \eta_s, \eta_t ηs,ηt:与时间步相关的缩放系数。
-
2.2 DanceGRPO
2.2.1 去噪过程建模为MDP
-
MDP的要素定义
-
状态(State): s t ≜ ( c , t , z t ) s_t \triangleq (c, t, z_t) st≜(c,t,zt)
- c c c:条件提示
- ≜ \triangleq ≜:定义为
-
动作(Action): a t ≜ z t − 1 , π ( a t ∣ s t ) ≜ p ( z t − 1 ∣ z t , c ) a_t \triangleq z_{t-1}, \quad \pi(a_t | s_t) \triangleq p(z_{t-1} | z_t, c) at≜zt−1,π(at∣st)≜p(zt−1∣zt,c)
-
动作 a t a_t at 是下一步的状态 z t − 1 z_{t-1} zt−1。
-
策略 π ( a t ∣ s t ) \pi(a_t | s_t) π(at∣st) 即去噪模型,对应 z t z_{t} zt 到 z t − 1 z_{t-1} zt−1的概率。
-
-
状态转移(Transition): P ( s t + 1 ∣ s t , a t ) ≜ ( δ c , δ t − 1 , δ z t − 1 ) P(s_{t+1} | s_t, a_t) \triangleq (\delta_c , \delta_{t-1} , \delta_{z_{t-1}}) P(st+1∣st,at)≜(δc,δt−1,δzt−1)
-
解释
-
δ
y
\delta_y
δy 是Dirac delta函数(仅在
y
y
y 处非零),表示确定性转移。
- 也就是下一个状态 s t + 1 s_{t+1} st+1 一定为 ( c , t − 1 , z t − 1 ) (c,t-1,z_{t-1}) (c,t−1,zt−1)
-
δ
y
\delta_y
δy 是Dirac delta函数(仅在
y
y
y 处非零),表示确定性转移。
-
意义: 去噪过程的每一步严格按时间倒序执行,无随机性(与DDIM的确定性采样一致)。
-
-
奖励(Reward): R ( s t , a t ) ≜ { r ( z 0 , c ) , if t = 0 0 , otherwise R(s_t, a_t) \triangleq \begin{cases} r(z_0, c), & \text{if } t=0 \\0, & \text{otherwise}\end{cases} R(st,at)≜{r(z0,c),0,if t=0otherwise
-
设计逻辑:
- 仅在终止状态计算奖励。
- 中间步骤奖励为0,因无法直接评估部分去噪结果的质量。
-
奖励模型: r ( z 0 , c ) r(z_0, c) r(z0,c) 通常基于视觉-语言模型(如CLIP、Qwen-VL)
-
-
-
轨迹(Trajectory)
-
长度:固定为 T T T 步。
-
终止:到达 t = 0 t=0 t=0 后进入终止状态,不再转移。
-
2.2.2 SDE的采样形式化
-
核心动机
-
GRPO的需求: GRPO依赖随机探索(通过多轨迹采样)和轨迹概率分布来更新策略。
-
问题: 扩散模型和整流流的原始采样过程是确定性或部分确定性的,无法提供足够的随机性。
-
解决方案: 将两者的采样过程统一为随机微分方程(SDE)形式,通过引入噪声项 ϵ t \epsilon_t ϵt 实现随机探索。
-
-
扩散模型的SDE形式化
-
前向SDE(加噪过程): d z t = f t z t d t + g t d w dz_t = f_t z_t dt + g_t dw dzt=ftztdt+gtdw
-
f t , g t f_t, g_t ft,gt:与噪声调度相关的系数(控制噪声注入速度)。
-
d w dw dw:布朗运动(标准Wiener过程),表示随机噪声。
-
-
反向SDE(去噪过程)为支持随机探索,反向SDE需引入额外噪声项 ϵ t \epsilon_t ϵt:
d z t = [ f t z t − ( 1 + ϵ t 2 2 ) g t 2 ∇ log p t ( z t ) ] d t + ϵ t g t d w dz_t = \left[ f_t z_t - \left(1 + \frac{\epsilon_t^2}{2}\right) g_t^2 \nabla \log p_t(z_t) \right] dt + \epsilon_t g_t dw dzt=[ftzt−(1+2ϵt2)gt2∇logpt(zt)]dt+ϵtgtdw- ϵ t g t d w \epsilon_t g_t dw ϵtgtdw:新增的随机噪声项,为GRPO提供探索能力。
-
-
整流流的SDE形式化
-
原始ODE形式 :前向过程是线性ODE-- d z t = u t d t dz_t = u_t dt dzt=utdt
-
反向SDE
d z t = ( u t − 1 2 ϵ t 2 ∇ log p t ( z t ) ) d t + ϵ t d w dz_t = \left( u_t - \frac{1}{2} \epsilon_t^2 \nabla \log p_t(z_t) \right) dt + \epsilon_t dw dzt=(ut−21ϵt2∇logpt(zt))dt+ϵtdw -
关键修改:
- 添加得分函数修正项 − 1 2 ϵ t 2 ∇ log p t ( z t ) -\frac{1}{2} \epsilon_t^2 \nabla \log p_t(z_t) −21ϵt2∇logpt(zt) ,确保路径收敛性。
- 新增噪声项 ϵ t d w \epsilon_t dw ϵtdw 实现随机探索。
-
-
策略获得
- 假设 p t ( z t ) = N ( z t ∣ α t x , σ t 2 I ) p_t(z_t) = \mathcal{N}(z_t | \alpha_t x, \sigma_t^2 I) pt(zt)=N(zt∣αtx,σt2I)(高斯分布),则:
∇ log p t ( z t ) = − z t − α t x σ t 2 \nabla \log p_t(z_t) = -\frac{z_t - \alpha_t x}{\sigma_t^2} ∇logpt(zt)=−σt2zt−αtx
- 这个式子可以回带入上面两个SDE公式,来获得策略 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)
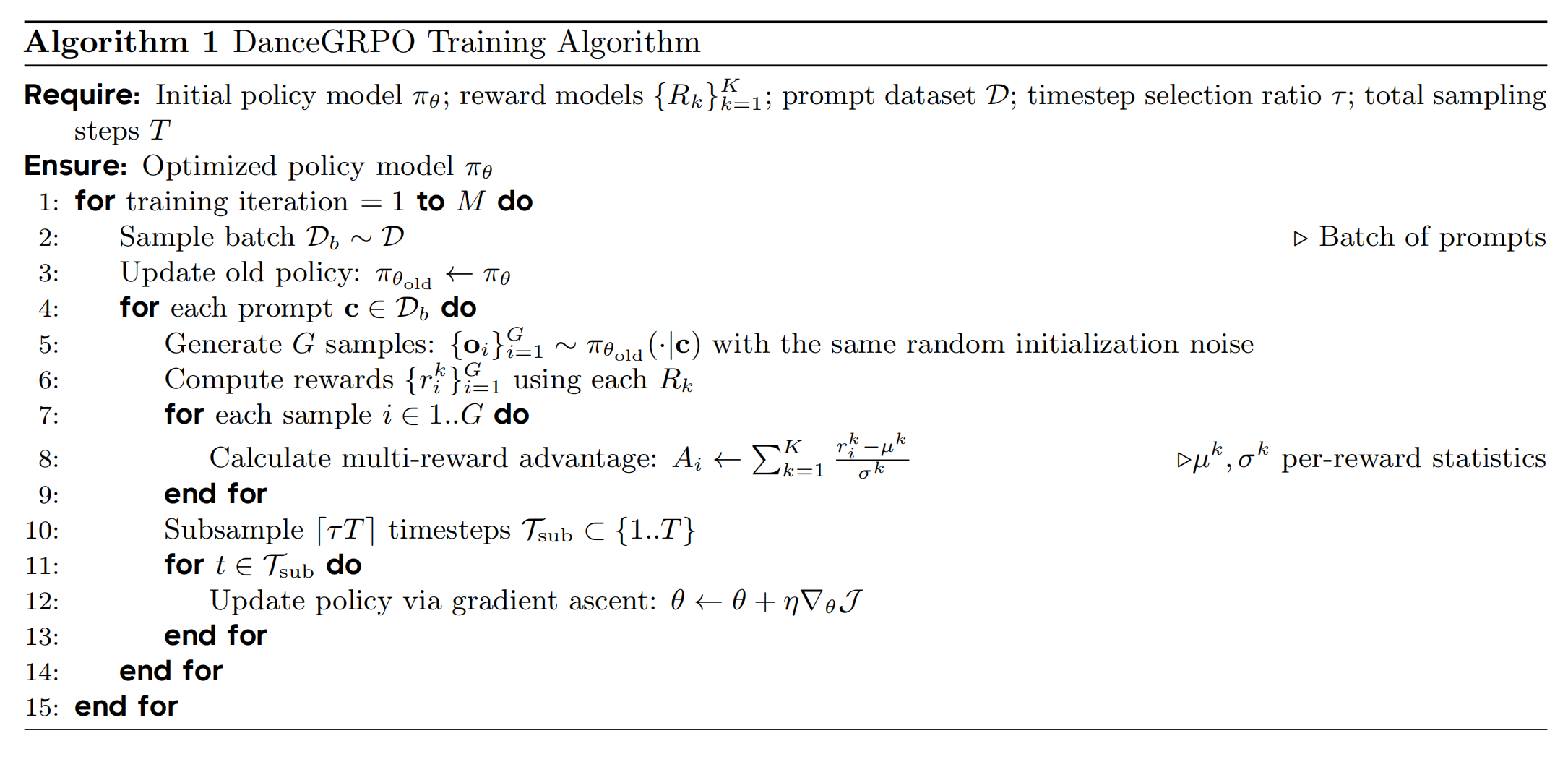
2.2.3 算法
-
核心目标函数
-
给定提示词 c c c,生成模型会从旧策略 π θ o l d π_{θ_{old}} πθold 采样一组输出 o 1 , o 2 , . . . , o G {o₁, o₂,..., o_G} o1,o2,...,oG,通过最大化以下目标函数优化新策略 π θ π_θ πθ :
J ( θ ) = E { o i } i = 1 G ∼ π θ o l d ( ⋅ ∣ c ) a t , i ∼ π θ o l d ( ⋅ ∣ s t , i ) [ [ 1 G ∑ i = 1 G 1 T ∑ t = 1 T min ( ρ t , i A i , clip ( ρ t , i , 1 − ϵ , 1 + ϵ ) A i ) ] J(\theta) = {\mathbb{E}_{\substack{\{o_i\}_{i=1}^G \sim \pi_{\theta_{old}}(\cdot|c) \\ a_{t,i} \sim \pi_{\theta_{old}}(\cdot|s_{t,i})}}} [\left[ \frac{1}{G} \sum_{i=1}^G \frac{1}{T} \sum_{t=1}^T \min\left( \rho_{t,i}A_i, \text{clip}(\rho_{t,i}, 1-\epsilon, 1+\epsilon)A_i \right) \right] J(θ)=E{oi}i=1G∼πθold(⋅∣c)at,i∼πθold(⋅∣st,i)[[G1i=1∑GT1t=1∑Tmin(ρt,iAi,clip(ρt,i,1−ϵ,1+ϵ)Ai)]-
ρ t , i = π θ ( a t , i ∣ s t , i ) π θ o l d ( a t , i ∣ s t , i ) \rho_{t,i} = \frac{\pi_\theta(a_{t,i}|s_{t,i})}{\pi_{\theta_{old}}(a_{t,i}|s_{t,i})} ρt,i=πθold(at,i∣st,i)πθ(at,i∣st,i) 是新旧策略的概率比
-
A i A_i Ai 是标准化优势函数(计算见下文)
-
ϵ \epsilon ϵ 是控制策略更新幅度的超参数
-
-
-
优势函数计算
A i = r i − mean ( { r 1 , r 2 , ⋯ , r G } ) std ( { r 1 , r 2 , ⋯ , r G } ) A_i = \frac{r_i - \text{mean}(\{r_1,r_2,\cdots,r_G\})}{\text{std}(\{r_1,r_2,\cdots,r_G\})} Ai=std({r1,r2,⋯,rG})ri−mean({r1,r2,⋯,rG})-
其中 r 1 , . . . , r G {r₁,...,r_G} r1,...,rG是对应输出的奖励值
-
由于实际奖励稀疏性,优化时对所有时间步使用相同的奖励信号
-
传统GRPO方法使用KL正则化防止奖励过优化,但实验显示省略该组件对性能影响很小,因此默认不包含KL正则项
-
-
-
完整算法流程
-
策略更新(第10-13行)
-
时间步子采样:
- 从T个时间步中选择⌈τT⌉个步(τ∈(0,1]),仅在这些步上计算梯度。
-
梯度上升更新:
-
对选中的时间步 t ∈ T s u b t ∈ T_{sub} t∈Tsub,计算目标函数 J ( θ ) J(θ) J(θ) 的梯度并更新参数 θ θ θ:
θ ← θ + η ∇ θ J \theta \leftarrow \theta + \eta \nabla_\theta J θ←θ+η∇θJ -
因为每一个时间步采取特定动作的概率不同,所以需要在不同时间步上做梯度更新
-
我觉得可以加上一个权重参数来优化梯度更新函数,因为不同的时间步会对生成结果产生不同大小的影响
-
-
-
2.2.4 噪声初始化
-
传统方法初始化噪声(如DDPO):
-
对同一提示词(prompt)生成的多个样本(如视频或图像),使用不同的随机噪声向量初始化。
-
问题:
- Reward Hacking:模型通过利用噪声的随机性,生成某些“幸运”样本(恰好匹配奖励函数偏好),而非真正学习提升整体质量。
- 训练不稳定:噪声差异导致梯度更新方向不一致,难以收敛。
-
-
DanceGRPO初始化
- 核心设计:对同一提示词 c 生成的 G 个样本,共享相同的初始化噪声。
2.2.5 时间步选择
- 在去噪轨迹中省略部分时间步的子集并不会影响模型性能。
- 这种减少计算步骤的方法在保持输出质量的同时显著提升了效率。
2.2.6 整合多个奖励模型
- 在实际应用中,我们采用多个奖励模型以确保训练过程更稳定、视觉输出质量更高。
- 仅使用HPS-v2.1奖励训练的模型易生成不自然(“油润感”)的输出
- 引入CLIP评分则有助于保持更真实的图像特征。
- 作者没有直接合并各奖励值,而是通过聚合优势函数来实现多模型协同。
- 该方法既能稳定优化过程,又能产生更均衡的生成结果。
2.2.7 基于Best-of-N推理扩展
- 本方法优先利用高效样本–通过Best-of-N采样筛选出的前k名与末k名候选样本。
- 这种选择性采样策略通过聚焦解空间中的高奖励区域与关键低奖励区域,显著提升训练效能。
- 当前采用暴力搜索生成这些样本。
- 树搜索或贪婪搜索等替代方法同样具有研究潜力
2.3 Different Rewards
-
实验验证范围
-
两种生成范式:扩散模型 / rectified flow
-
三种任务:文本→图像、文本→视频、图像→视频
-
四个基础模型:
-
Stable Diffusion
-
HunyuanVideo
-
FLUX
-
SkyReels-I2V
-
-
-
五类奖励模型设计
奖励模型 作用 技术实现 1. 图像美学评分 量化生成图像的视觉吸引力 基于人类评分数据微调的预训练模型 2. 文本-图像对齐(CLIP) 确保生成内容与输入提示词语义一致 CLIP模型计算图文跨模态相似度 3. 视频美学质量 评估视频帧质量及时序连贯性 视觉语言模型(VLM)扩展至时序域 4. 视频运动质量 分析运动轨迹和形变的物理合理性 物理感知VLM对运动轨迹建模 5. 阈值二值奖励 测试模型在阈值优化下的学习能力 基于固定阈值离散化奖励(超过阈值=1,否则=0)
2.4 Comparisons
3. Experiments
-
文本到图像生成(Text-to-Image Generation)
-
基础模型: Stable Diffusion v1.4、FLUX、HunyuanVideo-T2I
-
奖励模型: HPS-v2.1、CLIP Score、二值化奖励
-
训练数据: 精选提示词数据集(平衡多样性与复杂性)
-
测试评估:
- 1,000条测试提示词,用于计算CLIP分数和Pick-a-Pic性能
- GenEval和HPS-v2.1官方基准
-
-
文本到视频生成(Text-to-Video Generation)
-
基础模型:HunyuanVideo
-
奖励模型:VideoAlign
-
训练数据: VidProM数据
-
测试评估: 额外1,000条测试提示词,用于VideoAlign评分
-
-
图像到视频生成(Image-to-Video Generation)
-
基础模型:SkyReels-I2V
-
奖励模型:VideoAlign
-
训练数据:
- 提示词来自VidProM数据集
- 参考图像由HunyuanVideo-T2I生成
-
测试评估:1,000条测试提示词,计算VideoAlign分数
-