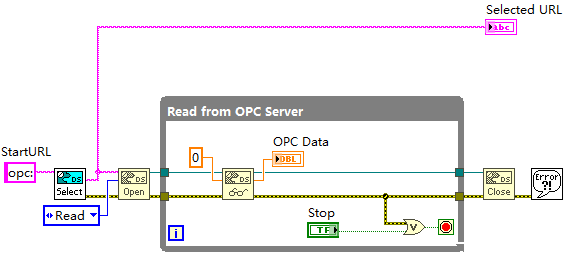
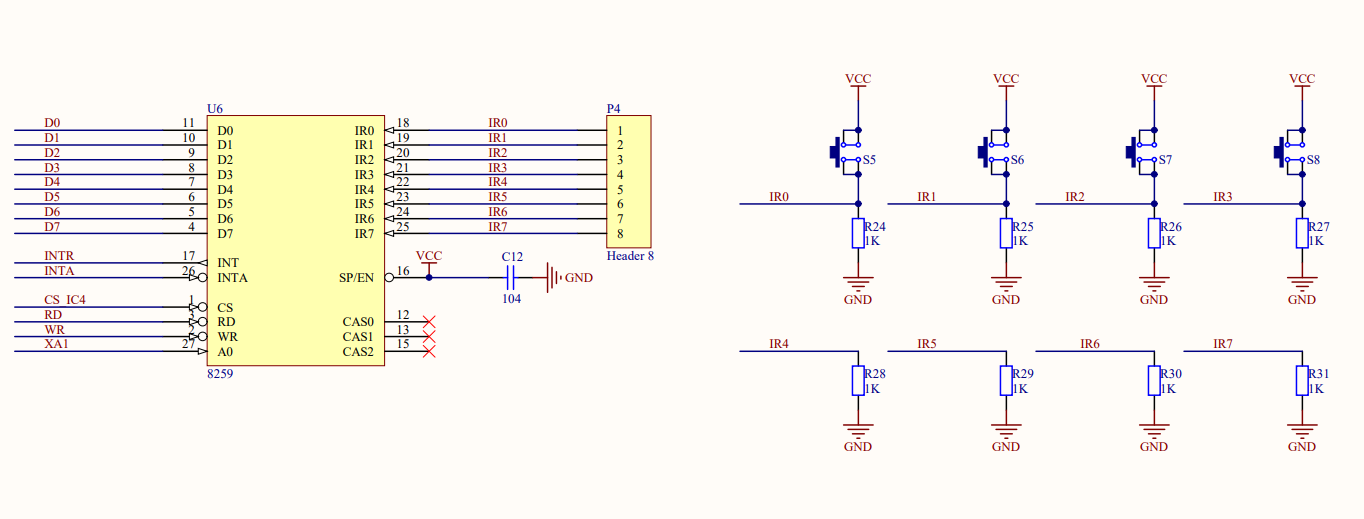
1.原理图
2.Deepseek示例代码
#include <dos.h>
#include <conio.h>
#include <stdio.h>
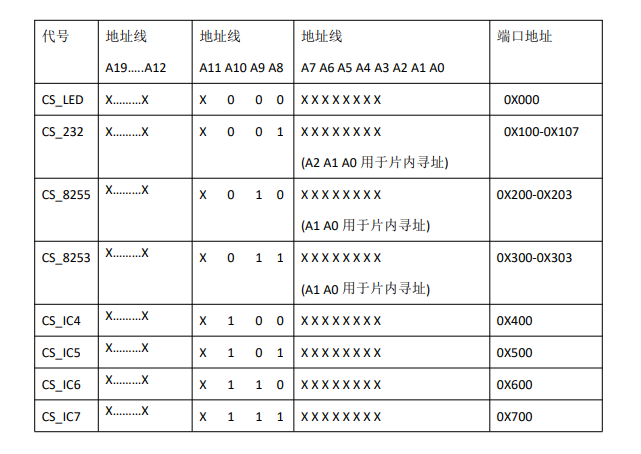
#define PIC1_CMD 0x400 // 命令端口 (A0=0)
#define PIC1_DATA 0x401 // 数据端口 (A0=1)
volatile int int_count = 0; // 中断计数器
void interrupt (*old_isr)(void); // 原中断向量
// 中断服务程序
void interrupt new_isr(void) {
int_count++; // 增加中断计数
// 显示中断信息
printf("\nIRQ0 Triggered! Count: %d", int_count);
// 发送EOI命令
outportb(PIC1_CMD, 0x20);
}
// 初始化8259
void init_8259(void) {
// ICW1: 边沿触发 | 单片 | 需要ICW4
outportb(PIC1_CMD, 0x13);
// ICW2: 中断向量基址=20h
outportb(PIC1_DATA, 0x20);
// ICW4: 8086模式 | 正常EOI
outportb(PIC1_DATA, 0x01);
// OCW1: 只允许IR0中断 (11111110b)
outportb(PIC1_DATA, 0xFE);
}
int main(void) {
clrscr();
printf("8259 Test Running. Press ESC to exit...\n");
// 保存原中断向量 (INT 20h)
old_isr = getvect(0x20);
// 设置新中断向量
setvect(0x20, new_isr);
// 初始化8259
init_8259();
// 启用中断
enable();
// 主循环
while(!kbhit() && int_count < 10) {
// 等待中断或按键
}
// 检查是否按ESC退出
if(kbhit() && getch() == 0x1B) {
printf("\nESC pressed. ");
}
// 恢复设置
disable();
setvect(0x20, old_isr);
// 屏蔽所有中断
outportb(PIC1_DATA, 0xFF);
printf("\nProgram terminated. Total interrupts: %d", int_count);
return 0;
}