针对鲲鹏 CPU + 麒麟 V10 的离线环境,手把手教你从环境准备到应用上线,所有依赖包提前打包好,步骤写成傻瓜式操作指南。
一、环境规划#
准备至少两台机器。
| 架构 | OS | 作用 |
|---|---|---|
| Arm64 | 任意,Mac 也可以 | 下载离线包 |
| Arm64 | 麒麟 V10 | 单机部署 K8s 和 Rainbond |
二、准备离线包#
2.1 准备 RKE2 离线包(K8s)#
下载 RKE2 v1.30.4 离线安装包。
wget https://pkg.rainbond.com/rke2/v1.30.4+rke2r1/rke2-images-linux-arm64.tar
wget https://pkg.rainbond.com/rke2/v1.30.4+rke2r1/rke2.linux-arm64.tar.gz
wget https://pkg.rainbond.com/rke2/v1.30.4+rke2r1/sha256sum-arm64.txt
wget https://rancher-mirror.rancher.cn/rke2/install.sh
2.2 准备 Helm 离线包#
下载 Helm 二进制离线包。
wget https://get.helm.sh/helm-v3.18.1-linux-arm64.tar.gz
2.3 准备 Rainbond 离线包#
使用脚本下载 Rainbond 离线镜像。
cat >download_rbd_images.sh <<'EOF'
#!/bin/bash
IMAGE_DOMAIN=registry.cn-hangzhou.aliyuncs.com
IMAGE_NAMESPACE=goodrain
VERSION=v6.3.0-release
image_list="${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rainbond:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-chaos:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-mq:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rainbond-operator:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-worker:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-api:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-init-probe:${VERSION}
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-monitor:v2.20.0
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/apisix-ingress-controller:v1.8.3
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/apisix:3.9.1-debian
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/local-path-provisioner:v0.0.30
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/minio:RELEASE.2023-10-24T04-42-36Z
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/rbd-db:8.0.19
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/registry:2.6.2
${IMAGE_DOMAIN}/${IMAGE_NAMESPACE}/alpine:latest"
for image in ${image_list}; do
docker pull "${image}"
done
docker save -o rainbond-offline-images.tar ${image_list}
EOF
获取 Rainbond Helm Chart 包。
git clone -b main --depth=1 https://github.com/goodrain/rainbond-chart.git
三、离线部署准备#
以下操作在离线的麒麟 V10 服务器上执行。
3.1 导入离线包#
导入上述准备的离线包。
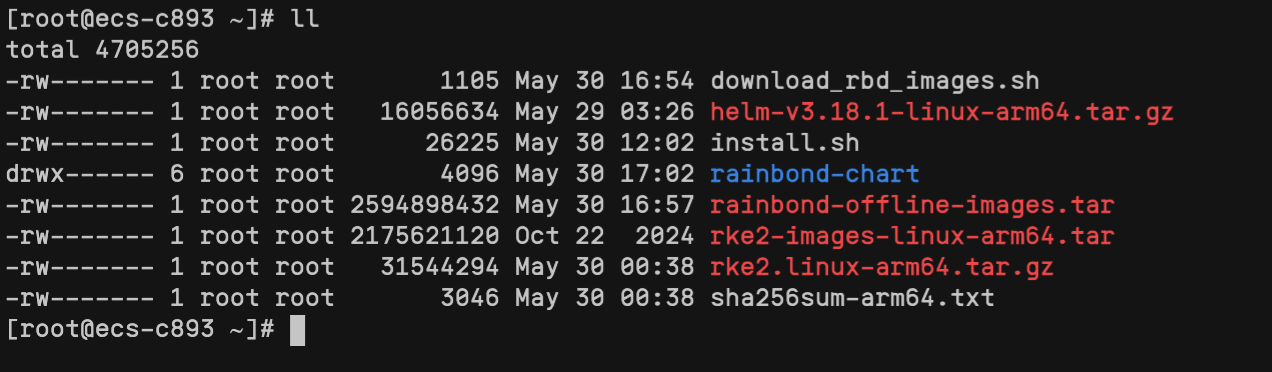
3.2 安装 Helm 命令#
解压离线包并将二进制移动到可执行目录。
tar zxvf helm-v3.18.1-linux-arm64.tar.gz && cp linux-arm64/helm /usr/local/bin
四、离线部署 K8s(RKE2 方式)#
4.1 配置 RKE2 参数#
- 创建 RKE2 配置文件目录。
mkdir -p /etc/rancher/rke2/config.yaml.d
- 配置 RKE2 参数,需禁用默认 Ingress 这会与 Rainbond 网关冲突。
cat >/etc/rancher/rke2/config.yaml.d/00-rbd.yaml <<EOL
disable:
- rke2-ingress-nginx
system-default-registry: registry.cn-hangzhou.aliyuncs.com
EOL
- 配置私有镜像仓库,
goodrain.me是 Rainbond 默认安装的私有镜像仓库域名。
cat >/etc/rancher/rke2/registries.yaml <<EOL
mirrors:
"goodrain.me":
endpoint:
- "https://goodrain.me"
configs:
"goodrain.me":
auth:
username: admin
password: admin1234
tls:
insecure_skip_verify: true
EOL
4.2 安装 RKE2(K8s 集群)#
- 将 RKE2 离线镜像包放到指定目录,启动时它会自动加载离线镜像包。
mkdir -p /var/lib/rancher/rke2/agent/images
cp /root/artifacts-rke2/rke2-images* /var/lib/rancher/rke2/agent/images
# 同时将 Rainbond 离线镜像包也放入该目录
cp /root/rainbond-offline-images.tar /var/lib/rancher/rke2/agent/images
- 准备安装目录。
mkdir /root/artifacts-rke2
- 将
rke2、rke2-images、sha256sum移动到一个目录中,如下所示:
mv install.sh rke2* sha256sum* /root/artifacts-rke2
cd /root/artifacts-rke2
- 执行安装命令。
INSTALL_RKE2_ARTIFACT_PATH=/root/artifacts-rke2 sh install.sh
- 启动 RKE2 服务。
systemctl enable rke2-server.service && systemctl start --no-block rke2-server.service
- 查看启动日志,大概需要 5-10 分钟才能完全启动。
journalctl -fu rke2-server
4.3 配置 Kubectl(K8s 命令行工具)#
- 配置 Kubectl 访问。
mkdir /root/.kube
cp /etc/rancher/rke2/rke2.yaml /root/.kube/config
cp /var/lib/rancher/rke2/bin/kubectl /usr/local/bin
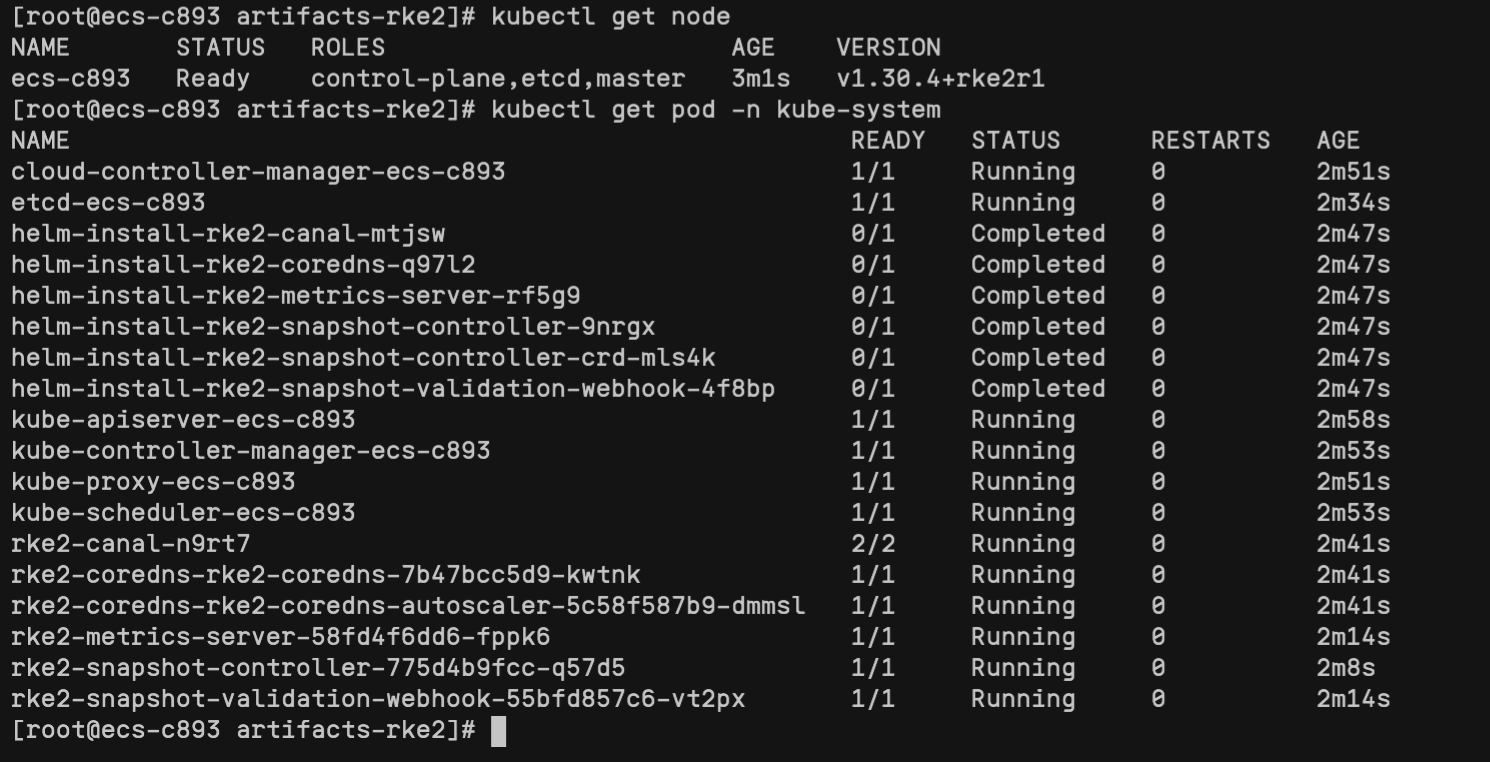
- 验证 K8s 集群状态。
kubectl get node
kubectl get pod -n kube-system
五、离线部署 Rainbond V6#
5.1 配置 Rainbond 安装参数#
- 创建 Helm
values.yaml配置文件。
cat >values.yaml <<EOL
Cluster:
#集群入口IP,网关节点的公网IP或者内网IP,或者网关节点之上的负载均衡
gatewayIngressIPs: 192.168.0.100
nodesForGateway:
# k8s节点外网IP,没外网IP填写内网IP
- externalIP: 192.168.0.100
# k8s节点内网IP
internalIP: 192.168.0.100
# k8s节点名称,通过 kubectl get node 获取
name: ecs-c893
# - More nodes for gateway
nodesForChaos:
# k8s节点名称
- name: ecs-c893
# - More nodes for chaos
containerdRuntimePath: /var/run/k3s/containerd # containerd.sock文件路径
Component:
rbd_app_ui:
env:
- name: DISABLE_DEFAULT_APP_MARKET # 禁用默认在线开源应用商店
value: "true"
EOL
5.2 离线安装 Rainbond#
- 执行命令离线安装 Rainbond。
helm install rainbond ./rainbond-chart --create-namespace -n rbd-system -f values.yaml
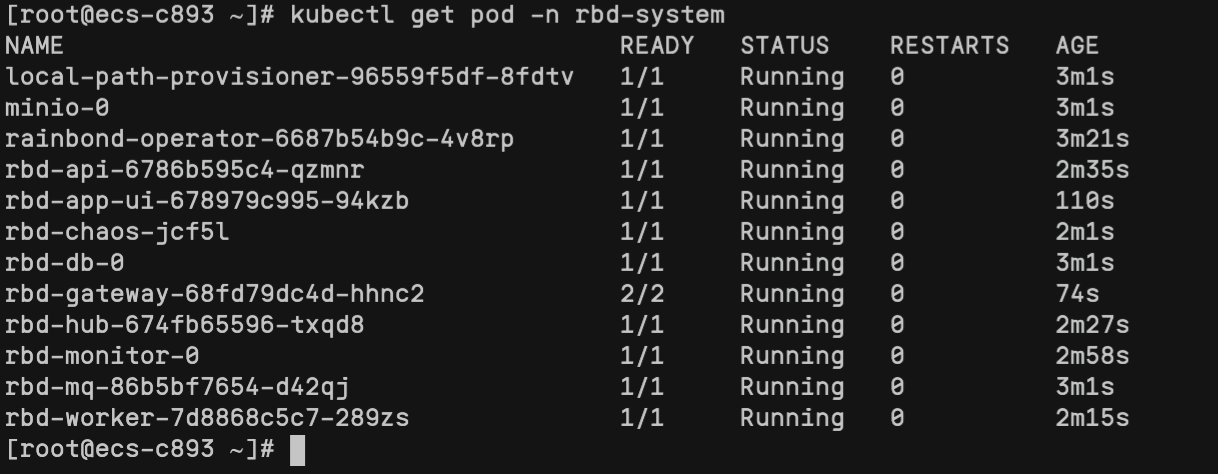
- 执行完安装命令后,在集群中执行以下命令查看安装状态。
watch kubectl get pod -n rbd-system
- 当名称包含
rbd-app-ui的 Pod 为 Running 状态时即安装成功。如下所示,Podrbd-app-ui-678979c995-94kzb为 Running 状态时,表示 Rainbond 安装成功。
如果你需要在离线环境下使用 Rainbond 的源码构建功能,你需要额外下载离线源码构建的离线包,请阅读 Rainbond 离线环境下使用源码构建文档。
六、部署验证#
6.1 访问 Rainbond 验证#
-
使用
gatewayIngressIPs配置的 IP 地址访问 Rainbond,例如:http://192.168.0.100:7070。 -
填写 Rainbond 注册信息并登录 Rainbond。
-
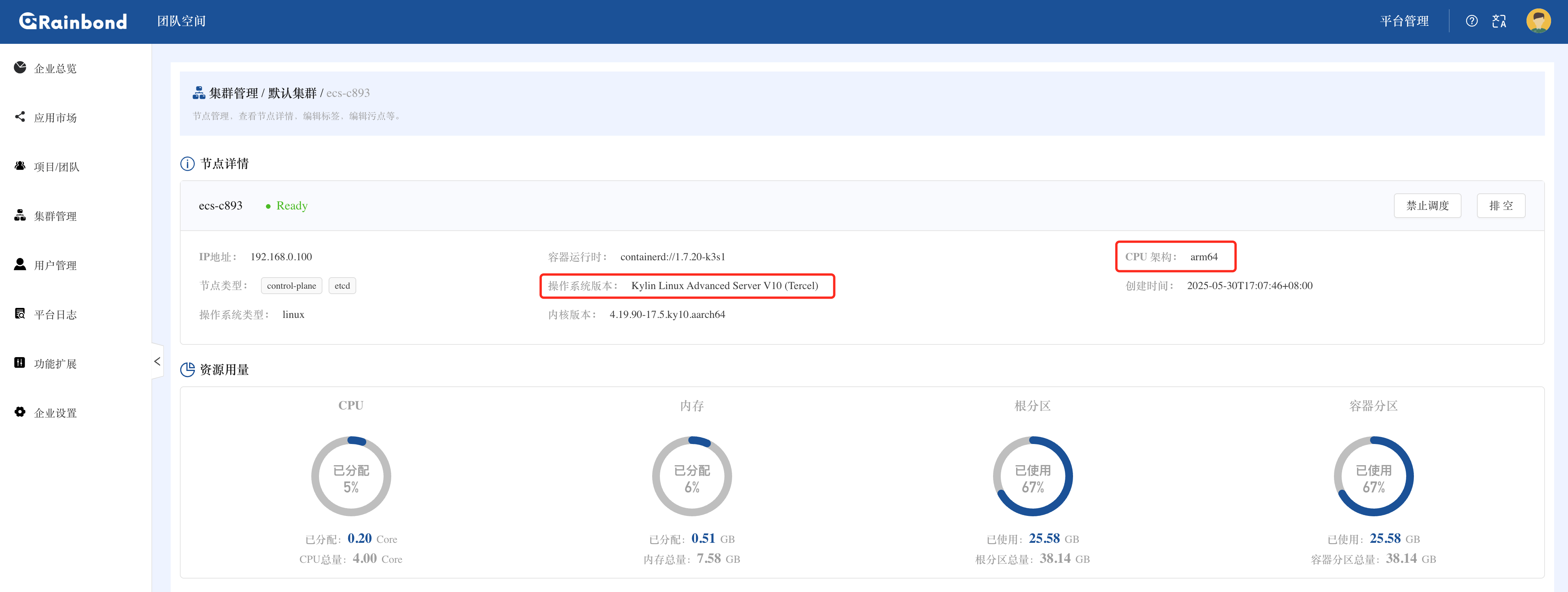
查看集群信息。
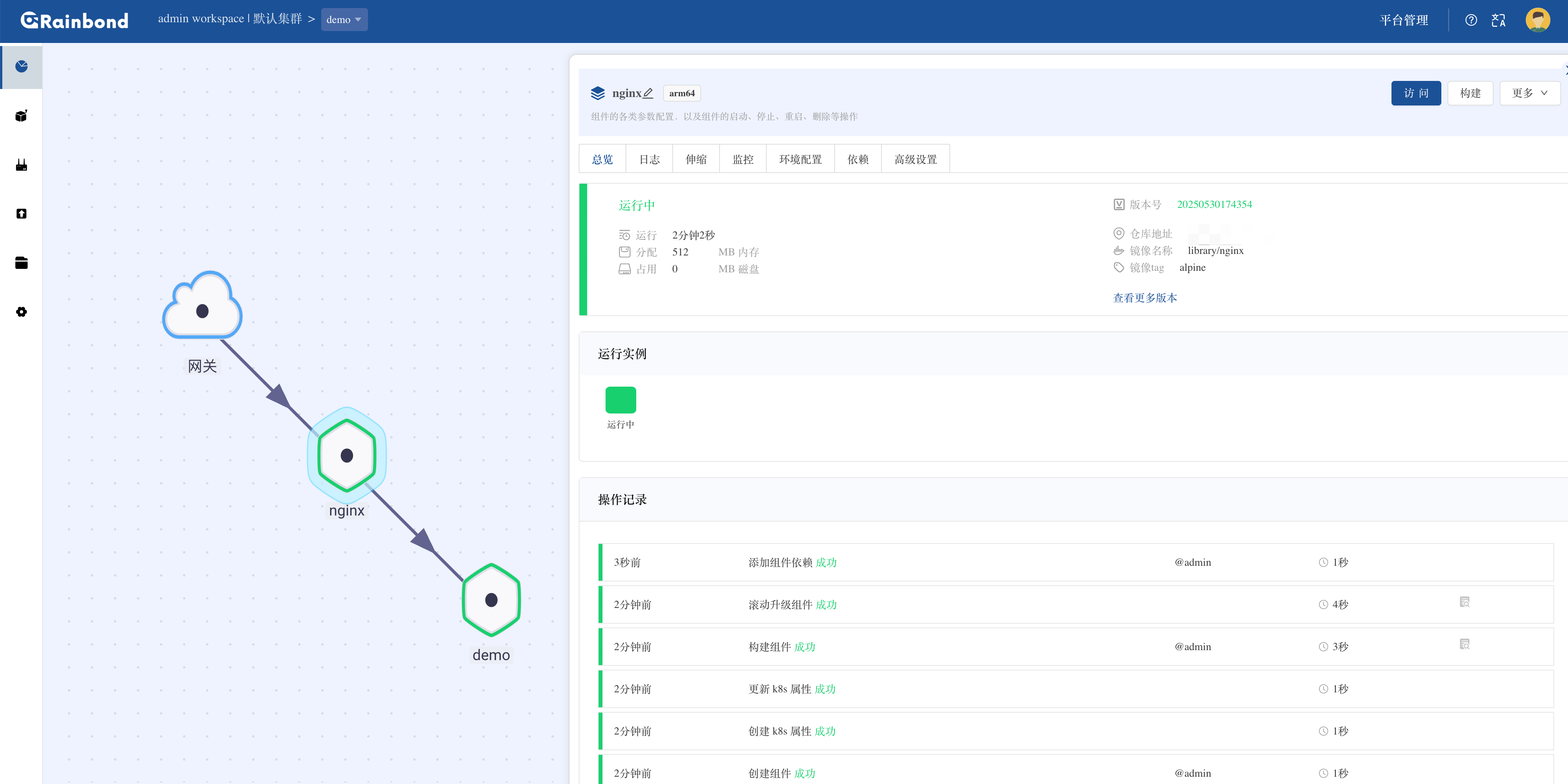
6.2 快速部署测试应用#
以 Nginx 为例,在工作空间 -> 容器,通过 Nginx 镜像部署个应用。如下: