首先贴出实现代码:
OcclusionFader.ts
import { AbstractEngine, Material, type Behavior, type Mesh, type PBRMetallicRoughnessMaterial, type Scene } from "@babylonjs/core";
import { OcclusionTester } from "../../OcclusionTester";
export class OcclusionFader implements Behavior<Mesh>{
name: string = "OcclusionFader";
private _mesh:Mesh | null = null;
private _scene:Scene | null = null;
private _engine:AbstractEngine | null = null;
private _meshes:Mesh[] = [];
private _mat:PBRMetallicRoughnessMaterial | null = null;
private _visibility:number = 0.1;
private _occlusionTester : OcclusionTester | null = null;
constructor(visibility:number = 0.1){
this._visibility = visibility;
}
init(): void {}
private _attached = false;
attach(target: Mesh): void {
if(this._attached)return;
this._attached = true;
this._mesh = target;
this._scene = target.getScene();
this._engine = this._scene.getEngine();
this._mat = this._mesh.material?.clone(this._mesh.material.name + "_clone") as PBRMetallicRoughnessMaterial;
this._mesh.material = this._mat;
this._occlusionTester = new OcclusionTester(this._scene as Scene);
this._occlusionTester.setDivisor(8);
this._occlusionTester.updateMesh(this._meshes, this._mesh);
this._occlusionTester.onFinishCheckOcclusion.add(this._setIsOccluded.bind(this));
this._occlusionTester.startCheckOcclusion();
this._scene.onBeforeRenderObservable.add(this._updateVisibility.bind(this));
}
detach(): void {
this._attached = false;
this._mesh = null;
}
public addMesh(mesh:Mesh):void{
this._meshes.push(mesh);
if(this._occlusionTester)this._occlusionTester.updateMesh(this._meshes, this._mesh as Mesh);
}
private _isOccluded:boolean = false;
private _setIsOccluded(isOccluded:boolean):void{
this._isOccluded = isOccluded;
}
private _vUse:number = 1;
private _updateVisibility():void{
if(!this._mat){
console.log("mat is null!");
return;
}
if(!this._occlusionTester){
console.log("occlusionTester is null!");
return;
}
this._mat.transparencyMode = Material.MATERIAL_ALPHABLEND;
if(this._isOccluded){
if(this._vUse > this._visibility){
this._vUse -= this._engine!.getDeltaTime() * 0.005;
}
else{
this._vUse = this._visibility;
}
}
else{
if(this._vUse < 1){
this._vUse += this._engine!.getDeltaTime() * 0.005;
}
else{
this._mat.transparencyMode = Material.MATERIAL_ALPHATEST;
this._vUse = 1;
}
}
this._mesh!.material!.alpha = this._vUse;
}
public dispose(): void {
this._attached = false;
this._mesh = null;
this._occlusionTester?.dispose();
}
}OcclusionTester.ts
import { AbstractEngine, Color4, Engine, Mesh, Observable, RenderTargetTexture, Scene, ShaderMaterial, UniversalCamera } from "@babylonjs/core";
export class OcclusionTester {
private _engine: AbstractEngine;
private _mainScene: Scene;
private _tempScene: Scene; // 临时场景(离屏渲染)
private _tempCam: UniversalCamera;
private _w: number = 8;
private _h: number = 8;
private _mat = this._createDepthMaterial();
private _depthTexA:RenderTargetTexture | null = null;
private _depthTexB:RenderTargetTexture | null = null;
private _divisor:number = 1;
private options = {
generateDepthBuffer: true, // 启用深度缓冲
generateStencilBuffer: false, // 禁用模板缓冲
type: Engine.TEXTURETYPE_FLOAT // 浮点纹理
}
constructor(mainScene: Scene) {
this._mainScene = mainScene;
this._engine = mainScene.getEngine();
// 创建临时场景和相机
this._tempScene = new Scene(this._engine);
this._tempCam = mainScene.activeCamera!.clone("tempCamera") as UniversalCamera;
this._mainScene.removeCamera(this._tempCam);
this._tempScene.addCamera(this._tempCam);
this._tempScene.activeCamera = this._tempCam;
this._tempScene.clearColor = new Color4(0, 0, 0, 0);
const size = this.resize();
this._depthTexA = this.createDepthTex("depthTexA", size);
this._depthTexB = this.createDepthTex("depthTexB", size);
this._engine.onResizeObservable.add(()=>{
const size = this.resize();
if(this._depthTexA)this._depthTexA.resize(size);
if(this._depthTexB)this._depthTexB.resize(size);
}
);
}
public setDivisor(divisor:number):void{
this._divisor = divisor < 1 ? 1 : divisor;
}
public getDivisor():number{
return this._divisor;
}
private createDepthTex(name:string, size:{width: number, height: number}):RenderTargetTexture{
const depthTex = new RenderTargetTexture(name, size, this._tempScene, this.options);
depthTex.activeCamera = this._tempCam;
this._tempScene.customRenderTargets.push(depthTex);
return depthTex;
}
private resize = ():{width: number, height: number} => {
this._w = Math.floor(this._engine.getRenderWidth() / this._divisor);
this._h = Math.floor(this._engine.getRenderHeight() / this._divisor);
return {width: this._w, height: this._h};
};
private _meshesCloned:Mesh[] = [];
private _meshOccCloned:Mesh[] = [];
public updateMesh(meshes: Mesh[], meshOcc: Mesh): void {
if(!this._depthTexA)return;
this._meshesCloned.forEach((mesh)=>{mesh.dispose();});
this._meshesCloned.length = 0;
meshes.forEach((mesh)=>{
const meshClone = this._cloneMeshToTempScene(mesh);
this._meshesCloned.push(meshClone);
});
this._depthTexA.renderList = this._meshesCloned;
if(!this._depthTexB)return;
this._meshOccCloned.forEach((mesh)=>{mesh.dispose();});
this._meshOccCloned.length = 0;
const meshOccClone = this._cloneMeshToTempScene(meshOcc);
this._meshOccCloned.push(meshOccClone);
this._depthTexB.renderList = this._meshOccCloned;
}
private _cloneMeshToTempScene(mesh:Mesh):Mesh{
const meshClone = mesh.clone(mesh.name + "_Cloned");
this._mainScene.removeMesh(meshClone);
const occ = meshClone.getBehaviorByName("OcclusionFader");
if(occ) meshClone.removeBehavior(occ);
meshClone.material = this._mat;
this._tempScene.addMesh(meshClone);
return meshClone;
};
private checkEnabled:boolean = true;
public startCheckOcclusion():void{
this.checkEnabled = true;
this.checkOcclusion();
}
public stopCheckOcclusion():void{
this.checkEnabled = false;
}
private isOccluded:boolean = false;
public getIsOccluded():boolean{
return this.isOccluded;
}
public onFinishCheckOcclusion:Observable<boolean> = new Observable<boolean>();
private async checkOcclusion(): Promise<void> {
if(!this.checkEnabled)return;
this.syncCam();
// 在临时场景中执行离屏渲染
await new Promise<void>(resolve => {
this._tempScene.executeWhenReady(() => {
this._tempScene.render();
resolve();
});
});
// 读取深度数据
const depthBufA = await this._depthTexA!.readPixels(
0, // faceIndex (立方体贴图用,默认0)
0, // level (mipmap级别,默认0)
null, // buffer (不预分配缓冲区)
true, // flushRenderer (强制刷新渲染器)
false, // noDataConversion (允许数据转换)
0, // x (起始X坐标)
0, // y (起始Y坐标)
this._w,// width (读取宽度)
this._h // height (读取高度)
) as Float32Array; // 关键:声明为Float32Array
const depthBufB = await this._depthTexB!.readPixels(
0, // faceIndex (立方体贴图用,默认0)
0, // level (mipmap级别,默认0)
null, // buffer (不预分配缓冲区)
true, // flushRenderer (强制刷新渲染器)
false, // noDataConversion (允许数据转换)
0, // x (起始X坐标)
0, // y (起始Y坐标)
this._w,// width (读取宽度)
this._h // height (读取高度)
) as Float32Array; // 关键:声明为Float32Array
// 检查遮挡
let isOccluded = false;
for (let i = 0; i < depthBufA.length; i += 4) {
if (depthBufA[i] > 0 && depthBufB[i] > 0){
if(depthBufB[i] < depthBufA[i]) {
isOccluded = true;
break;
}
}
}
this.isOccluded = isOccluded;
this.onFinishCheckOcclusion.notifyObservers(isOccluded);
// 使用setTimeout来延迟下一次检查,而不是直接递归
setTimeout(() => this.checkOcclusion(), 0);
}
private syncCam() {
const mainCam = this._mainScene.activeCamera as UniversalCamera;
this._tempCam.position.copyFrom(mainCam.position);
this._tempCam.rotation.copyFrom(mainCam.rotation);
}
// 创建深度写入材质
private _createDepthMaterial(): ShaderMaterial {
const vertexShader = `
precision highp float;
attribute vec3 position;
uniform mat4 worldViewProjection;
varying float vDepth;
void main() {
vec4 pos = worldViewProjection * vec4(position, 1.0);
gl_Position = pos;
vDepth = pos.z / pos.w; // 透视除法后的归一化深度
}
`;
const fragmentShader = `
precision highp float;
varying float vDepth;
void main() {
gl_FragColor = vec4(vDepth, vDepth, vDepth, 1.0);
}
`;
return new ShaderMaterial(
"depthMaterial",
this._tempScene,
{
vertexSource: vertexShader,
fragmentSource: fragmentShader
},
{
attributes: ["position"],
uniforms: ["worldViewProjection"]
}
);
}
public dispose() {
this._tempScene.dispose();
this._tempScene.customRenderTargets.forEach(rt => rt.dispose());
this._tempScene.customRenderTargets = [];
this._tempScene.meshes.forEach(mesh => mesh.dispose());
}
}一、核心思路解析
本方案通过结合离屏渲染与深度检测技术,实现了一个动态的物体遮挡透明度控制系统。主要分为两大模块:
-
OcclusionTester:负责执行遮挡检测的核心逻辑
-
OcclusionFader:基于检测结果控制物体透明度的行为组件
二、关键技术实现
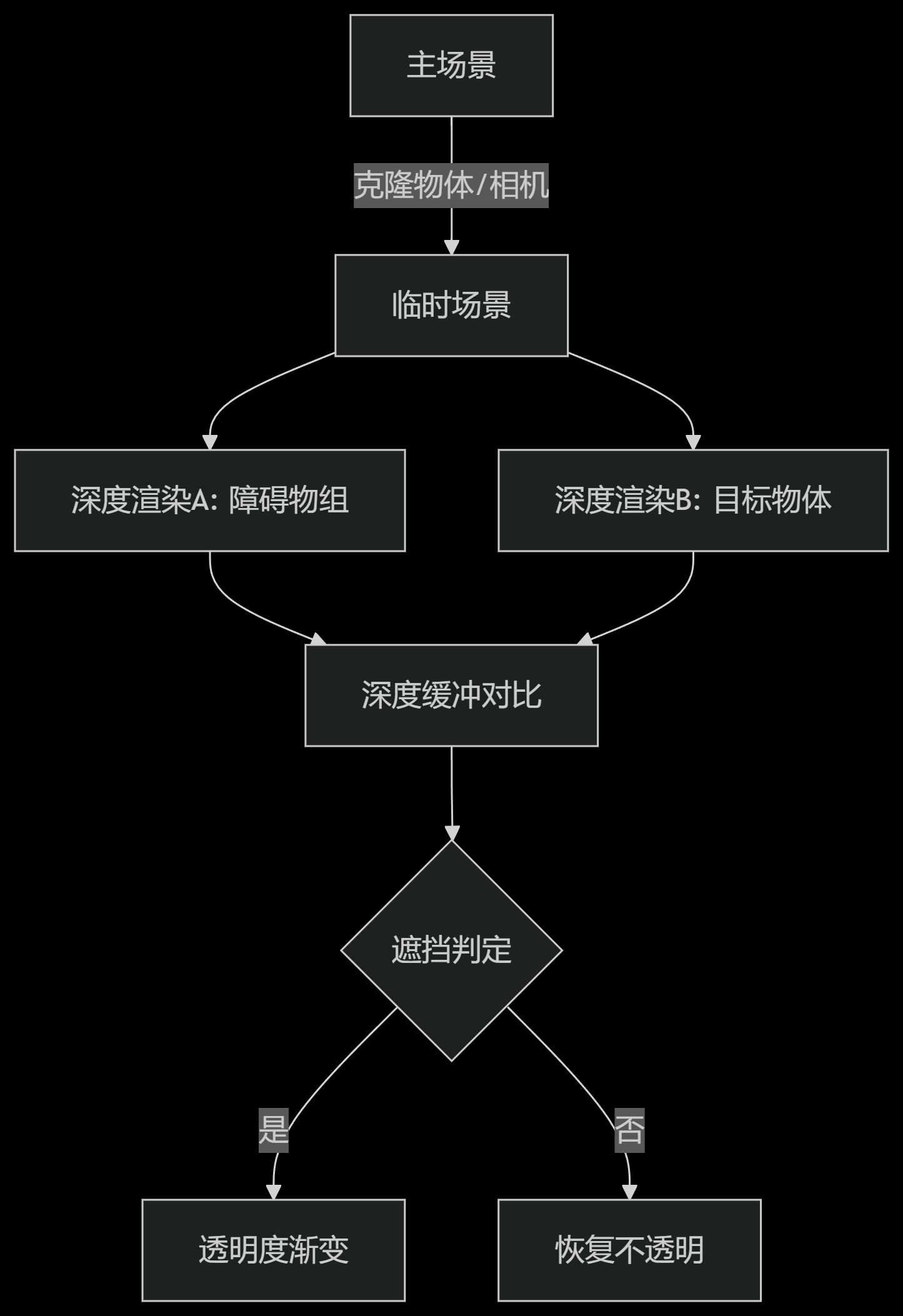
1. 双场景渲染机制
-
主场景:承载实际可见的3D物体
-
临时场景:专门用于离屏深度渲染
-
优势:避免对主场景渲染管线造成干扰
this._tempScene = new Scene(this._engine);2. 深度信息采集
-
使用RenderTargetTexture生成两张深度图:
-
depthTexA:被检测物体组的深度
-
depthTexB:目标物体的深度
-
// 创建深度纹理
createDepthTex(name: string, size: {width: number, height: number}){
return new RenderTargetTexture(name, size, this._tempScene, {
generateDepthBuffer: true,
type: Engine.TEXTURETYPE_FLOAT
});
}3. 深度比较算法
for (let i = 0; i < depthBufA.length; i += 4) {
if (depthBufA[i] > 0 && depthBufB[i] > 0){
if(depthBufB[i] < depthBufA[i]) {
isOccluded = true;
break;
}
}
}4. 透明度渐变控制
// 平滑过渡效果
this._vUse += this._engine!.getDeltaTime() * 0.005;
this._mesh!.material!.alpha = this._vUse;三、实现步骤详解
步骤1:场景初始化
-
克隆主场景相机到临时场景
-
设置纯黑色背景消除干扰
步骤2:物体克隆
-
克隆待检测物体到临时场景
-
替换为专用深度材质
private _cloneMeshToTempScene(mesh: Mesh){
const clone = mesh.clone();
clone.material = this._mat; // 使用深度材质
return clone;
}步骤3:异步深度检测
-
使用requestAnimationFrame避免阻塞主线程
-
通过readPixels读取深度缓冲
const depthBuf = await texture.readPixels() as Float32Array;步骤4:结果反馈
-
通过Observable通知透明度控制器
-
实现检测与渲染的解耦
四、性能优化策略
-
分辨率控制:通过divisor参数降低检测精度
setDivisor(8); // 使用1/8分辨率检测 -
异步检测机制:使用setTimeout保持事件循环畅通
-
对象复用:缓存克隆物体避免重复创建
-
按需渲染:仅在需要时启动检测循环
五、应用场景示例
-
AR应用中重要物体的防遮挡
-
3D编辑器中的选中物体高亮
-
游戏中的动态场景元素管理
-
可视化大屏的重点信息保护
六、潜在优化方向
-
WebGL2特性利用:改用深度纹理格式
layout(depth) out float gl_FragDepth; -
GPU加速计算:改用Compute Shader处理深度比较
-
空间分割优化:结合八叉树空间划分
-
LOD策略:动态调整检测精度
七、总结
本方案通过创新的双场景架构,在保证主场景渲染性能的同时,实现了精确的实时遮挡检测。深度信息的对比算法与透明度控制的结合,展现了WebGL在复杂交互场景中的应用潜力。开发者可根据具体需求调整检测精度和响应速度,在视觉效果与性能消耗之间找到最佳平衡点。