无人机空中安全飞行评估需结合改进碰撞模型、蒙特卡洛仿真、安全间隔反推及动态避障策略,通过多机型分类与实时数据融合,实现从理论建模到实际部署的全流程管控,为城市低空密集飞行提供安全保障。
需求
无人机飞行间隔安全智能评估
- 无人机之间安全间隔评估:实现主要类型异构无人机飞行间隔安全评估,支持实时计算异构无人机之间的水平、垂直安全间隔;
- **无人机与有人机安全间隔评估:**实现主要类型异构无人机飞行间隔安全评估,支持实时计算无人机与有人机机之间的水平、垂直安全间隔;
无人机飞行安全风险评估
- 无人机飞行风险等级评估:考虑低空障碍物分布、无人机构型性能约束、气象条件、飞行高度及潜在风险因素,形成飞行风险评估等级;
- **低空飞行风险地图:**考虑低空障碍物、人口信息、气象条件、地形条件生成飞行风险地图;
无人机飞行间隔安全智能评估
技术手段
碰撞风险模型构建
2.1 模型选择与改进
- 无人机间碰撞模型:
采用改进 Reich 模型或 Event 模型,根据无人机物理特性调整碰撞盒形状(如球形、圆台体)或者根据无人机尺寸进行构建的模型。- Reich 模型改进:将长方体碰撞盒替换为球形或椭球形,适应无人机对称结构(如多旋翼无人机)。
- Event 模型应用:针对复合翼无人机,采用长方体碰撞盒;针对多旋翼无人机,使用圆台体碰撞盒以提高精度。
- 双碰撞模板模型(碰撞层+避险层)-小型无人机:基于无人机物理尺寸(碰撞层尺寸)+考虑避让灵活性及定位误差(GPS 误差 ±5m)(避险层范围)+建立碰撞风险与无人机密度的正相关关系(如 Matlab 仿真)(密度影响);
- 实现步骤:
- 计算碰撞层内无人机重叠概率。
- 引入避险层修正系数,评估避让成功率。
- 结合气象因素(风速、能见度)调整模型参数。
- 仿真验证,确定最大安全密度(如 4.7 架 /km³)。
- 实现步骤:
- **位置误差概率模型 - 中型物流无人机(纵向、侧向、垂直方向):**基于 GPS/INS 组合导航误差(如纵向σ=10m,侧向 σ=5m)(定位误差)+±5% 标称速度(如顺丰无人机巡航速度 60km/h)(速度误差)+ 侧风强度与航向偏移关系(如10m/s侧风导致侧偏15m)(侧风误差)进行评估。
- 实现步骤:
- 分方向建立碰撞概率积分公式(纵向:相对速度积分;侧向:侧风修正)。
- 计算各方向最小安全间隔(如纵向 145.31m,侧向 47.94m)。
- 结合航线实际数据(如赣州物流航线)验证模型。
- 输出三维安全间隔矩阵,指导航线规划。
- 实现步骤:
- **改进冲突区域模型 - 大型无人机(动态保护区+故障率修正):**基于圆柱形保护区(半径=无人机尺寸+定位误差)(冲突区域)+ 军用无人机系统故障率(如 1×10⁻⁵/小时)(故障率)+ 操作员响应成功率(如 95%)(人因可靠性)来进行评估;
- 实现步骤:
- 构建冲突区域,计算两无人机轨迹交汇概率。
- 引入故障率与操作员可靠性权重(如式 CR=2×VOP×NP×[(1-α)×HCP+α×NHCP])。
- Event 模型中叠加侦察轨迹,分析高度层穿越频率。
- 蒙特卡洛仿真确定最小安全间距(如水平 3km,垂直 300m)。
- 实现步骤:
各个模型的主要内容以及优缺点;
| 模型 | 主要内容 | 优缺点 |
|---|---|---|
| Reich 模型 | 为航空器设置碰撞模板和临近层, 将另一航空器视为质点,分析该质 点从纵向、侧向和垂直方向上进入 碰撞模板的概率 | 优点:可以较好解决飞行间隔安全性的评估问题,应用性很好; 缺点:限制条件较多、没有考虑管制员的动 态参与、导航误差的概率分布由于尾部样本 (大误差)过少而难以拟合,无法得到确切 的概率分布 |
| Event模型 | 设置扩展碰撞盒盒间隔层,碰撞风 险视为碰撞盒飞越间隔层的频率与 航空器处于碰撞盒概率的乘积 | 优点:使用范围广、限制条件少、分析透彻, 参数明确,易理解和计算 缺点:只提出了平行航路上的纵向和侧向的 碰撞风险分析方法,没有对垂直方向上的事 件模型进行分析 |
| 位置误差概率模型 | 分析航空器在三个方向上的位置误 差,建立运动学方程,通过积分计 算位置误差影响下的重叠概率 | 优点:可以分析不同时刻的碰撞概率和冲突 概率,全面地了解碰撞风险的动态变化过程 缺点:依赖于具体的导航设备,需要知道不 同导航设备的精度 |
| 冲突区域模型 | 建立航空器交叉飞行的冲突区域, 利用几何关系求解在冲突区域内飞 行的航空器碰撞风险 | 优点:为飞机设立了冲突保护区,考虑了管 制员对碰撞风险的影响 缺点:没有考虑飞行员对碰撞风险的影响 |
| 随机微分方程模型 | 运用马尔可夫过程解决吸收边界的 碰撞问题,分析在瞬态边界情况下 的交汇问题,并研究在三维航路网 络的交汇率,通过求解偏微分方程 来研究碰撞风险 | 优点:避免了Reich模型限制条件过多的弊端 缺点:比 Reich 模型的理论基础复杂,不易理解,没有 Reich 模型应用广泛 |
| 事故树模型 | 将终端区的碰撞风险划分为几个不 同阶段的碰撞风险,对于每个阶段 的碰撞风险,采用事故树和事件树 相结合的方法从侧向、纵向和尾流 间隔三个角度研究缩小间隔标准所 导致的风险 | 优点:可以清晰的分析每部分因素对碰撞风 险的影响 缺点:需要构建复杂且全面的事故数,过程繁琐 |
- 无人机与飞鸟碰撞模型:
建立基于位置误差的概率模型,假设飞鸟轨迹服从正态分布,计算纵向、侧向、垂直方向的重叠概率。
2.2 关键参数定义
- 碰撞盒尺寸:根据无人机尺寸(长度、翼展、高度)确定,例如球形碰撞盒半径为机身最大尺寸。
- 定位误差:服从正态分布,结合 RNP(所需导航性能)确定标准差(如 RNP=15 米对应 σ=7.65 米)。
- 速度误差:服从均匀分布,结合最大速度和俯仰角限制模拟相对速度。
- 气象因素:譬如侧风,通过引入风速-航偏角模型(如 Δy=风速×sin(θ)×Δt);并且能见度的影响避让决策概率(低能见度下避险层扩大 20%)。
- 无人机性能:统计不同型号无人机的故障率(MTBF)和可靠性(如 RQ-1B 可靠性为 89%)。结合空域内各机型比例,加权计算综合性能参数。
参数计算与仿真
2.2.1 蒙特卡洛仿真
- 相对速度计算:考虑速度误差、航向角、俯仰角分布,通过蒙特卡洛模拟生成随机样本,统计相对速度期望值。
- 重叠概率计算:
- 纵向:积分正态分布函数,计算实际距离小于碰撞盒半径的概率。
- 侧向与垂直:类似纵向,结合航路间隔标准与误差分布。
2.2.2 安全目标水平(TLS)设定
- 参考民航标准(如 ICAO 的 5×10⁻⁹ 次/飞行小时),针对无人机特性分级(确定风险等级):
- 轻型无人机:10⁻⁷ 次/飞行小时
- 中型无人机:10⁻⁸ 次/飞行小时
- 重型无人机:10⁻⁹ 次/飞行小时
安全间隔确定
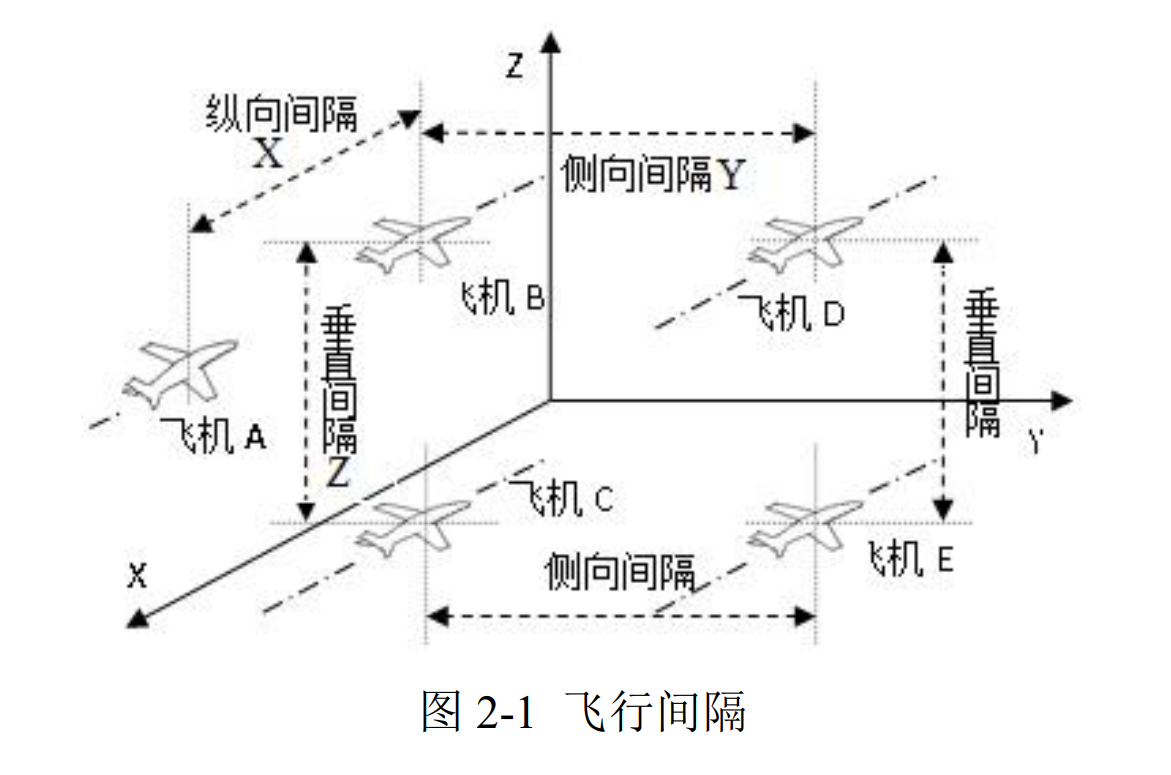
飞行间隔是航空器在飞行时航空器之间或航空器与障碍物之间所保持的空间距离,为保证飞行安全,这个空间距离需要满足要求,但如果飞行间隔过大,会导致空域资源浪费,影响空域运行效率,故需要制定即适合航空器安全飞行又不造成空域浪费的间隔标准。在三维空间中,航空器的飞行间隔通常包含水平和垂直间隔,其中水平间隔又包含了纵向和侧向间隔。
2.3.1 最小间隔计算
- 反推法:基于 TLS,调整纵向、侧向、垂直间隔,使碰撞风险总和低于目标值。
公式示例:

通过迭代求解满足 CR < TLS 的最小 Sx,Sy,Sz。
2.3.2 多机型间隔矩阵
- 分类统计:按有效载荷和载客量划分无人机类型(轻型、中型、重型),计算平均碰撞盒尺寸。
- 组合间隔:不同机型组合时,取碰撞盒尺寸平均值,安全目标水平取较高者。
示例结果:
| 类型 | 轻型多旋翼 | 轻型复合翼 | 中型复合翼 | 重型复合翼 |
|---|---|---|---|---|
| 轻型多旋翼 | 82 m | 84 m | 90 m | 96 m |
| 轻型复合翼 | 84 m | 83 m | 91 m | 97 m |
| 中型复合翼 | 90 m | 91 m | 93 m | 100 m |
| 重型复合翼 | 96 m | 97 m | 100 m | 102 m |
动态评估与实时避障
2.4.1 实时数据融合
- 输入数据:无人机实时位置、速度、航向、高度及环境信息(如飞鸟活动区域)。
- 动态更新:每隔 Δt 更新碰撞风险,重新计算安全间隔。
2.4.2 避障策略
- 路径调整:若碰撞风险超过阈值,采用 A* 算法或人工势场法调整航向或高度。
- 协同通信:多机协同场景下,通过 V2V(车联网)共享位置信息,实现分布式避障。
实现方案
采用经典 Event 碰撞模型和基于圆台体碰撞盒的改进 Event 碰撞模型,考虑定位误差,速度误差等计算碰撞模型参数。按照有效载荷与载客量将 eVTOL 分为轻型、中型和重型,计算碰撞盒尺寸,确定不同的安全目标水平,得出不同类型 eVTOL 的最小安全间隔。
只要航空器之间在飞行过程中始终保持飞行间隔大于最小的飞行安全间隔就不会发生碰撞,但目前大多数航空器的间隔判断都依赖于导航定位系统,在实际飞行时,这些系统都会存在误差,同时受人为因素和气象等因素的影响,所以就导致航空器实际位置与显示位置会有所偏差,从而引起航空器碰撞事故的发生。
为保证航空器的飞行安全,国际民航组织(International Civil Aviation Organization, ICAO)对航空器的安全飞行规定了统一的安全风险标准,这个标准规定了在不同情况下两航空器的碰撞风险临界值,即安全目标水平,总体安全目标水平为 1 × 10 − 7 1\times 10^{-7} 1×10−7次事故/飞行小时,在空中发生碰撞的安全目标水平为 1.55 × 10 − 8 1.55\times 10^{-8} 1.55×10−8次事故/飞行小时,纵向、侧 向和垂直方向上碰撞的安全目标水平均为 5 × 10 9 5\times 10^{9} 5×109次事故/飞行小时,根据规定,将一次碰 撞看作为两次事故。
复合翼碰撞模型
经典 Event 碰撞模型中的长方体碰撞盒,通用性强, 符合复合翼型 eVTOL 的整体外形特征;适用性更高,可以更好的刻画不同型号的复合翼型 eVTOL, 经典 Event 碰撞模型的基本假设条件是:
- 模型仅考虑两架飞行器之间的碰撞;
- 两架飞行器之间的位置相互独立;
- 两架飞行器之间的纵向、侧向、垂直间 隔分别记为 S x , S y , S z m S_{x},S_{y},S_{z}\mathrm{m} Sx,Sy,Szm; ;
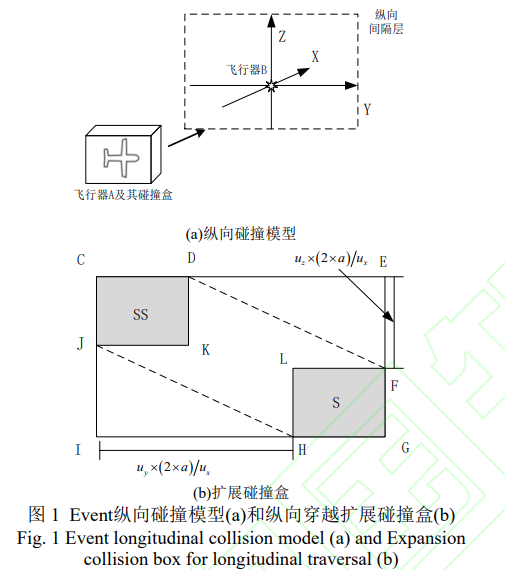
- Event 纵向碰撞模型主要研究的是同高度层同航路前后的碰撞;
假设两个飞行器 A、B,根据飞行器 A 建立碰撞盒,碰撞盒的尺寸是飞行器 A 的两倍,将 B 视为质点,以点 B 为原点建立三维直角坐标系,X 轴、Y 轴、Z 轴分别对应 的是纵向、侧向、垂直方向。同时定义 Z 轴、Y 轴所构成的平面为纵向间隔层,设四边形 CEGI 代表纵向间隔层,当 A 穿越纵向间隔层时将会留下投影轨迹,四边形 LFGH(S 区域)—四边形 CDKJ(SS 区域),若此时飞行器 B 在六边形 CDFGHJ 中,则会发生碰撞
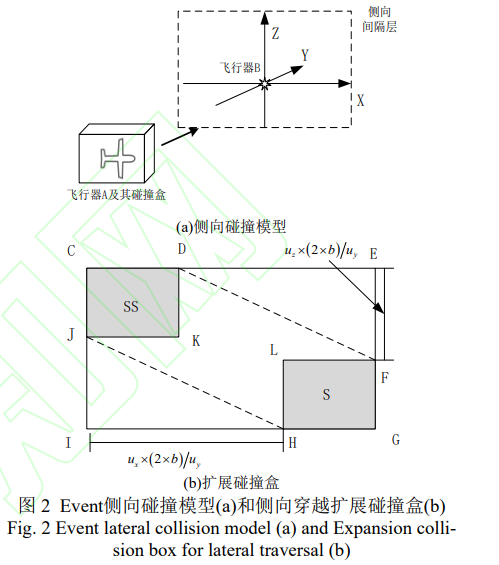
- Event 侧向碰撞模型主要研究的是同高度层 相邻平行航路的碰撞;
同理,侧向就是 Z 轴、Y 轴构建的平面为侧向间隔层:
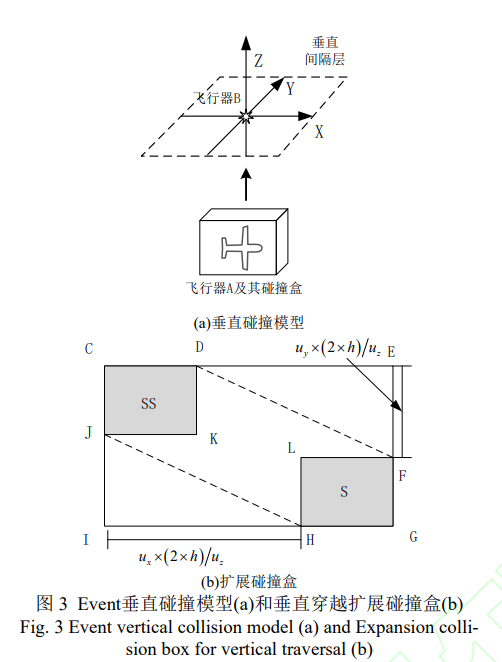
- Event 垂直碰撞模型主要研究的是两架飞行 器在相同航迹、相邻高度层上的碰撞;
同理,侧向就是 X 轴、Y 轴构建的平面为侧向间隔层:
多旋翼碰撞模型
针对多旋翼型 eVTOL,采用基于圆台体碰撞盒的 Event 碰撞模型,相比于长方体、球体、拼接四棱锥等模型,圆台体更加拟合多旋翼型 eVTOL 的轮廓,能更精确地计算 eVTOL 的碰撞风险;
扩展碰撞盒的面积与碰撞概率直接相关,计算改变碰撞盒后的碰撞风险,只需要计算出圆台体扩展碰撞盒与原长方体扩展碰撞盒面积比值。
- Event 纵向碰撞模型:对于纵向穿越,改进后的纵向穿越扩展碰撞盒如图所示
- **Event 侧向碰撞模型:**对于侧向穿越,改进后的纵向穿越扩展碰撞盒如图所示
- Event 垂直碰撞模型:对于垂直穿越,改进后的纵向穿越扩展碰撞盒如图所示

碰撞风险计算
该模型需要的参数有:碰撞盒的尺寸、纵向、侧向、垂直重叠概率盒相对速度。根据参数进行推到以及仿真计算获取计算安全间隔与碰撞概率的函数关系;然后根据这个量化的碰撞风险水平与安全目标水平 TLS(Target Level of Safety)进行比较,安全目标水平是一个可接受的碰撞风险概率最大值,它的单位是次事故每飞行小时,确定可接受的最大碰撞概率(即安全目标水平)可以反推出最小的安全间隔。
碰撞盒尺寸
为提高碰撞盒的普适性,分别取各类机型尺寸参数中的平均值(包括长度、翼展和高度),计算轻型多旋翼、轻型复合 翼、中型复合翼、重型复合翼之间的碰撞盒尺寸。
总结
目前来说主流实现的有两种方式 Event 模型、改进的 Reich 模型,有一个实现方案是基于 Event 模型并且验证了大疆 M600、M300 无人机,先基于这两个模型进行实现一版本。
| 特征 | Reich 模型 | Event 模型 |
|---|---|---|
| 适用场景 | 平行航路简单场景 | 交叉航路/垂直间隔复杂场景 |
| 维度支持 | 二维(纵向+侧向) | 三维(含垂直方向) |
| 误差处理 | 单误差源叠加 | 多误差源耦合分析 |
| 计算复杂度 | O(1) | O(n)(需蒙特卡洛仿真) |
| 典型应用 | 航路初始间距设计 | UAM/无人机空域冲突检测 |
Rich 模型计算
核心参数:
- 航空器参数:
- L: 航空器长度 (m)
- W: 航空器翼展 (m)
- H: 航空器高度 (m)
- V: 相对速度 (m/s)
- 误差参数:
- σ__x: 纵向导航误差标准差 (m)
- σ__y: 侧向导航误差标准差 (m)
- λ: 单位时间内的飞行器流量 (架次/小时)
- 空域参数:
- S: 航路间距 (m)
- ΔH: 垂直间隔 (m)
核心公式:
总碰撞风险 = 纵向风险 + 侧向风险
- 纵向碰撞风险:
P l o n g = λ 2 L V ⋅ 1 2 π σ x exp ( − S 2 2 σ x 2 ) P_\mathrm{long}=\frac{\lambda^2L}{V}\cdot\frac{1}{\sqrt{2\pi}\sigma_x}\exp\left(-\frac{S^2}{2\sigma_x^2}\right) Plong=Vλ2L⋅2πσx1exp(−2σx2S2)
- 侧向碰撞风险:
P l a t = λ 2 W V ⋅ 1 2 π σ y exp ( − S 2 2 σ y 2 ) P_{\mathrm{lat}}=\frac{\lambda^2W}{V}\cdot\frac{1}{\sqrt{2\pi}\sigma_y}\exp\left(-\frac{S^2}{2\sigma_y^2}\right) Plat=Vλ2W⋅2πσy1exp(−2σy2S2)
Event 模型计算(改进型多维模型)
新增参数:
- 三维误差:
- σ__z: 垂直导航误差标准差 (m)
- 运动参数:
- θ: 航向角差 (°)
- ϕ: 俯仰角差 (°)
- 碰撞几何:
- R: 等效碰撞球半径 (m)
R = L 2 + W 2 + H 2 3 R=\sqrt{\frac{L^2+W^2+H^2}{3}} R=3L2+W2+H2
分方向公式:
- 纵向事件风险:
P
l
o
n
g
=
λ
2
R
V
cos
θ
⋅
1
2
σ
x
e
r
f
(
L
2
σ
x
)
P_\mathrm{long}=\frac{\lambda^2R}{V\cos\theta}\cdot\frac{1}{2\sigma_x}\mathrm{erf}\left(\frac{L}{2\sigma_x}\right)
Plong=Vcosθλ2R⋅2σx1erf(2σxL)
1.
- 侧向事件风险:
P l a t = λ 2 R V sin θ ⋅ 1 2 σ y e r f ( W 2 σ y ) P_\mathrm{lat}=\frac{\lambda^2R}{V\sin\theta}\cdot\frac{1}{2\sigma_y}\mathrm{erf}\left(\frac{W}{2\sigma_y}\right) Plat=Vsinθλ2R⋅2σy1erf(2σyW)
- 垂直事件风险:
P v e r t = λ 2 R V sin ϕ ⋅ 1 2 σ z e r f ( H 2 σ z ) P_\mathrm{vert}=\frac{\lambda^2R}{V\sin\phi}\cdot\frac{1}{2\sigma_z}\mathrm{erf}\left(\frac{H}{2\sigma_z}\right) Pvert=Vsinϕλ2R⋅2σz1erf(2σzH)
参考
- 无人机低空飞行障碍物环境风险评估方法研究-以京津新城为例_贺洪波
- 不同类无人机运行碰撞风险研究_阳杰.pdf
- 城市低空无人机空中碰撞风险计算方法研究_励瑾.pdf
- 面向城市低空的多机型eVTOL安全间隔评估_王兴隆.pdf
- 无人机安全飞行风险评估研究_高俊杰.pdf