角度/方向损失
sin(a−b)=sinacosb−cosasinb
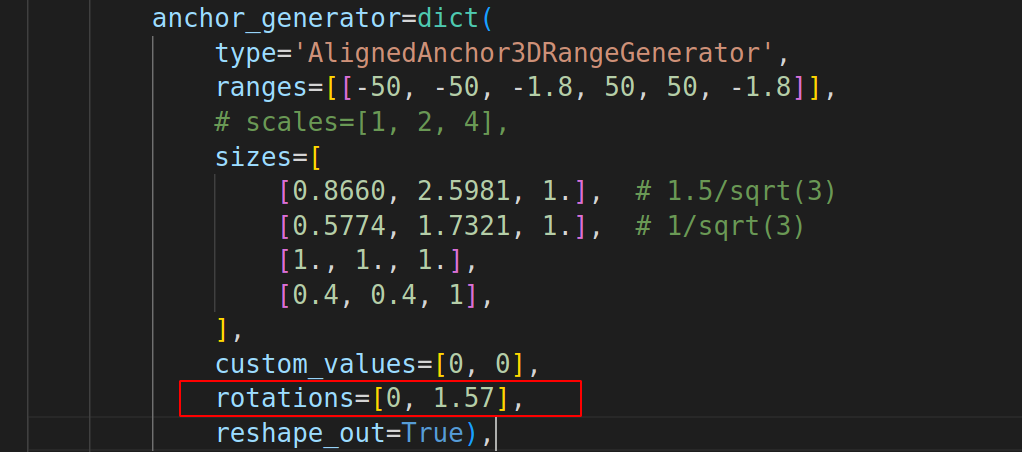
config参数
dir_offset=0.7854, # pi/4
dir_limit_offset=0,
box编解码
# Copyright (c) OpenMMLab. All rights reserved.
import torch
from mmdet.core.bbox import BaseBBoxCoder
from mmdet.core.bbox.builder import BBOX_CODERS
import ipdb
@BBOX_CODERS.register_module()
class DeltaXYZWLHRBBoxCoder(BaseBBoxCoder):
"""Bbox Coder for 3D boxes.
Args:
code_size (int): The dimension of boxes to be encoded.
"""
def __init__(self, code_size=7):
super(DeltaXYZWLHRBBoxCoder, self).__init__()
self.code_size = code_size
@staticmethod
def encode(src_boxes, dst_boxes):
"""Get box regression transformation deltas (dx, dy, dz, dw, dh, dl,
dr, dv*) that can be used to transform the `src_boxes` into the
`target_boxes`.
Args:
src_boxes (torch.Tensor): source boxes, e.g., object proposals.
dst_boxes (torch.Tensor): target of the transformation, e.g.,
ground-truth boxes.
Returns:
torch.Tensor: Box transformation deltas.
"""
box_ndim = src_boxes.shape[-1]
cas, cgs, cts = [], [], []
if box_ndim > 7:
xa, ya, za, wa, la, ha, ra, *cas = torch.split(
src_boxes, 1, dim=-1)
xg, yg, zg, wg, lg, hg, rg, *cgs = torch.split(
dst_boxes, 1, dim=-1)
cts = [g - a for g, a in zip(cgs, cas)]
else:
xa, ya, za, wa, la, ha, ra = torch.split(src_boxes, 1, dim=-1)
xg, yg, zg, wg, lg, hg, rg = torch.split(dst_boxes, 1, dim=-1)
za = za + ha / 2
zg = zg + hg / 2
diagonal = torch.sqrt(la**2 + wa**2)
xt = (xg - xa) / diagonal
yt = (yg - ya) / diagonal
zt = (zg - za) / ha
lt = torch.log(lg / la)
wt = torch.log(wg / wa)
ht = torch.log(hg / ha)
rt = rg - ra
return torch.cat([xt, yt, zt, wt, lt, ht, rt, *cts], dim=-1)
@staticmethod
def decode(anchors, deltas):
"""Apply transformation `deltas` (dx, dy, dz, dw, dh, dl, dr, dv*) to
`boxes`.
Args:
anchors (torch.Tensor): Parameters of anchors with shape (N, 7).
deltas (torch.Tensor): Encoded boxes with shape
(N, 7+n) [x, y, z, w, l, h, r, velo*].
Returns:
torch.Tensor: Decoded boxes.
"""
cas, cts = [], []
box_ndim = anchors.shape[-1]
if box_ndim > 7:
xa, ya, za, wa, la, ha, ra, *cas = torch.split(anchors, 1, dim=-1)
xt, yt, zt, wt, lt, ht, rt, *cts = torch.split(deltas, 1, dim=-1)
else:
xa, ya, za, wa, la, ha, ra = torch.split(anchors, 1, dim=-1)
xt, yt, zt, wt, lt, ht, rt = torch.split(deltas, 1, dim=-1)
za = za + ha / 2
diagonal = torch.sqrt(la**2 + wa**2)
xg = xt * diagonal + xa
yg = yt * diagonal + ya
zg = zt * ha + za
lg = torch.exp(lt) * la
wg = torch.exp(wt) * wa
hg = torch.exp(ht) * ha
rg = rt + ra
zg = zg - hg / 2
cgs = [t + a for t, a in zip(cts, cas)]
return torch.cat([xg, yg, zg, wg, lg, hg, rg, *cgs], dim=-1)
训练-方向分类
mmdet3d/models/dense_heads/free_anchor3d_head.py

2个方向 0,1
self.dir_offset = 0.7854 = pi/4
matched_object_targets是编码后的
matched_anchors = anchors_[matched] # [38,25,9]
matched_object_targets = self.bbox_coder.encode( # [38,25,9]
matched_anchors,
gt_bboxes_.unsqueeze(dim=1).expand_as(matched_anchors))
if self.use_direction_classifier:
# also calculate direction prob: P_{ij}^{dir}
matched_dir_targets = get_direction_target( # [38,25] dir=0,1 0~2*PI
matched_anchors,
matched_object_targets,
self.dir_offset,
one_hot=False)
loss_dir = self.loss_dir( # [38,25]
dir_cls_preds_[matched].transpose(-2, -1), # [38,2,25] F.cross_entropy
matched_dir_targets, # [38,25]
reduction_override='none')def get_direction_target(anchors,
reg_targets,
dir_offset=0,
num_bins=2,
one_hot=True):
"""Encode direction to 0 ~ num_bins-1.
Args:
anchors (torch.Tensor): Concatenated multi-level anchor.
reg_targets (torch.Tensor): Bbox regression targets.
dir_offset (int): Direction offset.
num_bins (int): Number of bins to divide 2*PI.
one_hot (bool): Whether to encode as one hot.
Returns:
torch.Tensor: Encoded direction targets.
"""
rot_gt = reg_targets[..., 6] + anchors[..., 6]
offset_rot = limit_period(rot_gt - dir_offset, 0, 2 * np.pi)
dir_cls_targets = torch.floor(offset_rot / (2 * np.pi / num_bins)).long()
dir_cls_targets = torch.clamp(dir_cls_targets, min=0, max=num_bins - 1)
if one_hot:
dir_targets = torch.zeros(
*list(dir_cls_targets.shape),
num_bins,
dtype=anchors.dtype,
device=dir_cls_targets.device)
dir_targets.scatter_(dir_cls_targets.unsqueeze(dim=-1).long(), 1.0)
dir_cls_targets = dir_targets
return dir_cls_targetsdef limit_period(val, offset=0.5, period=np.pi):
"""Limit the value into a period for periodic function.
Args:
val (torch.Tensor): The value to be converted.
offset (float, optional): Offset to set the value range. \
Defaults to 0.5.
period ([type], optional): Period of the value. Defaults to np.pi.
Returns:
torch.Tensor: Value in the range of \
[-offset * period, (1-offset) * period]
"""
return val - torch.floor(val / period + offset) * period训练-角度
mmdet3d/models/dense_heads/free_anchor3d_head.py
gt和pre都是编码后的偏移
sin(a−b)=sinacosb−cosasinb
if self.diff_rad_by_sin:
bbox_preds_[matched], matched_object_targets = \
self.add_sin_difference(
bbox_preds_[matched], matched_object_targets) def add_sin_difference(boxes1, boxes2):
"""Convert the rotation difference to difference in sine function.
Args:
boxes1 (torch.Tensor): Original Boxes in shape (NxC), where C>=7
and the 7th dimension is rotation dimension.
boxes2 (torch.Tensor): Target boxes in shape (NxC), where C>=7 and
the 7th dimension is rotation dimension.
Returns:
tuple[torch.Tensor]: ``boxes1`` and ``boxes2`` whose 7th \
dimensions are changed.
"""
rad_pred_encoding = torch.sin(boxes1[..., 6:7]) * torch.cos(
boxes2[..., 6:7])
rad_tg_encoding = torch.cos(boxes1[..., 6:7]) * torch.sin(boxes2[...,
6:7])
boxes1 = torch.cat(
[boxes1[..., :6], rad_pred_encoding, boxes1[..., 7:]], dim=-1)
boxes2 = torch.cat([boxes2[..., :6], rad_tg_encoding, boxes2[..., 7:]],
dim=-1)
return boxes1, boxes2test
mmdet3d/models/dense_heads/anchor3d_head.py get_bboxes
self.dir_limit_offset = 0
self.dir_offset = 0.7854 = PI/4
bboxes = self.bbox_coder.decode(anchors, bbox_pred)
dir_rot = limit_period(bboxes[..., 6] - self.dir_offset,
self.dir_limit_offset, np.pi)
bboxes[..., 6] = (
dir_rot + self.dir_offset +
np.pi * dir_scores.to(bboxes.dtype))def limit_period(val, offset=0.5, period=np.pi):
"""Limit the value into a period for periodic function.
Args:
val (torch.Tensor): The value to be converted.
offset (float, optional): Offset to set the value range. \
Defaults to 0.5.
period ([type], optional): Period of the value. Defaults to np.pi.
Returns:
torch.Tensor: Value in the range of \
[-offset * period, (1-offset) * period]
"""
return val - torch.floor(val / period + offset) * periodgt_bboxes_3d
limit rad to [-pi, pi]
参考
PointPillars论文解析和OpenPCDet代码解析_pointpillars代码解析-CSDN博客
https://github.com/open-mmlab/OpenPCDet/issues/80
MMDetection3D:数据加载简析 - 龙雪 - 博客园
https://zhuanlan.zhihu.com/p/270314921