paper Link: sci-hub: Learning to predict by the methods of temporal differences
1. 摘要
论文介绍了时间差分方法(TD 方法),这是一种用于预测问题的增量学习方法。TD 方法通过比较连续时间步的预测值之间的差异来调整模型,而不是传统的通过预测值与实际结果之间的差异来调整。
对于大多数现实的预测问题,TD方法比传统方法需要更少的内存和更少的峰值计算,并且可以产生更准确的预测。
2. 简介
传统预测学习方法依赖于预测值与实际结果之间的差异来分配“信用”(即调整权重),这种方法在多步预测问题中效率较低。TD 方法通过比较连续时间步的预测值之间的差异来更新模型。
对于 每天预测下周六是否会下雨 的问题:
- 传统方法:compare each prediction to the actual outcome whether or not it does rain on Saturday.
- 会根据周六的实际结果增加或减少预估权重。
- TD方法: compare each day’s prediction with that made on the following.
- 如果预测周一50%可能下雨,周二有75%可能下雨,TD方法会增加与周一类似几天的预测,而不是等到周六的实际结果出来
TD方法2个优势:
- 计算效率更高:TD 方法可以**更增量地更新预测值**,减少了计算量和存储需求。
- 更快的收敛速度:TD 方法在多步预测问题中表现更好,能够更快地收敛并产生更准确的预测。
3. TD和监督学习
主要关注多步预测。很多问题被定义成single-step预测问题,实际上将其认为multi-step预测问题会更加自然,比如一些感知学习问题:视频或语音识别问题,一般都是作为简单监督学习(a training set of isolated, correctly-classified input patterns.)。但是当人类听到或看到事物时,他们会随着时间的推移收到一系列输入,并不断更新他们对所看到或听到的事物的假设。
- 现在(2025)的很多语音识别都是
Transformer-Decoder方式,也是考虑到了前面的输入对后一个的影响。deepseek的multi-Token Prediction本质也是一样的
3.1 理论分析
一般监督回归模型参数更新方法(基于正态分布-最大似然):
- y ∼ N ( y ^ , σ 2 ) = 1 σ 2 π e − ( y − y ^ ) 2 2 σ 2 y \sim N(\hat{y}, \sigma ^ 2) = \frac{1}{\sigma\sqrt{2 \pi }} e^{-\frac{(y-\hat{y})^2}{2\sigma^2}} y∼N(y^,σ2)=σ2π1e−2σ2(y−y^)2
- m a x L = ∏ 1 n f ( y ∣ y ^ , σ 2 ) = ∏ i = 1 n 1 σ 2 π e − ( y − y ^ i ) 2 2 σ 2 = ( 2 π ) − n / 2 σ − n e − 1 2 σ 2 ∑ i = 1 n ( y − y i ) 2 max L = \prod_1^{n} f(y|\hat{y}, \sigma^2) =\prod_{i=1}^n \frac{1}{\sigma\sqrt{2 \pi }} e^{-\frac{(y-\hat y_i)^2}{2\sigma^2}}=(2\pi)^{-n/2}\sigma^{-n} e^{-\frac{1}{2\sigma^2}\sum_{i=1}^n(y-y_i)^2} maxL=∏1nf(y∣y^,σ2)=∏i=1nσ2π1e−2σ2(y−y^i)2=(2π)−n/2σ−ne−2σ21∑i=1n(y−yi)2
- m a x l n ( L ) ∼ − ∑ i = 1 n ( y − y i ) 2 → m i n M S E = ∑ i = 1 n ( y − y i ) 2 max ln(L) \sim -\sum_{i=1}^n(y-y_i)^2 \rightarrow min\ MSE=\sum_{i=1}^n(y-y_i)^2 maxln(L)∼−∑i=1n(y−yi)2→min MSE=∑i=1n(y−yi)2
- 更新力度为:
- Δ w = α ∑ t = 1 m w t ; Δ w t = α ( z − P t ) ∇ w P t \Delta w = \alpha \sum_{t=1}^m w_t;\Delta w_t = \alpha(z-P_t) \nabla _w P_t Δw=α∑t=1mwt;Δwt=α(z−Pt)∇wPt
- 线性回归: Δ w t = α ( w T x − z ) x \Delta w_t = \alpha(w^Tx-z) x Δwt=α(wTx−z)x
- 主要是基于真实值与预测值的偏差。在多步预测的时候,z已知之前无法确定
- 无法进增量计算
python-example:
class multiReg:
def __init__(self, feature_dim=7, learning_rate=0.1):
self.w = np.random.randn(feature_dim).reshape(-1, 1)
self.learning_rate = learning_rate
def predict(self, x):
return np.matmul(x, self.w)
def fit(self, x, y, batch_size=25, n_rounds=100):
n = x.shape[0]
idx = np.arange(n)
tq_bar = tqdm(range(n_rounds))
for round_i in tq_bar:
tq_bar.set_description(f'[ {round_i + 1} / {n_rounds}]')
np.random.shuffle(idx)
idx_l = [min(i, n) for i in range(0, n + batch_size, batch_size)]
for st, ed in zip(idx_l[:-1], idx_l[1:]):
batch_x = x[st:ed, ...]
batch_y = y[st:ed, ...]
# x @ w
p_t = self.predict(batch_x)
# (p_t - z)
e = p_t.reshape(batch_x.shape[0], -1) - batch_y
# \sum_{t=1}^T (p_t - z) @ x
grad = np.matmul(batch_x.transpose(0, 2, 1), e[..., np.newaxis]).mean(axis=0)
self.w -= self.learning_rate * grad
TD方法,同样的更新策略,但是可以进行增量计算
-
z
−
P
t
=
∑
k
=
t
m
(
P
k
+
1
−
P
k
)
;
w
h
e
r
e
P
m
+
1
=
z
z-P_t = \sum_{k=t}^m(P_{k+1}-P_{k}); \ \ \ where\ \ P_{m+1}=z
z−Pt=∑k=tm(Pk+1−Pk); where Pm+1=z
- Δ w = α ∑ t = 1 m Δ w t = α ∑ t = 1 m ∑ k = t m ( P k + 1 − P k ) ∇ w P t = ∑ t = 1 m α ( P t + 1 − P t ) ∑ k = 1 t ∇ w P k \Delta w = \alpha \sum_{t=1}^m\Delta w_t=\alpha \sum_{t=1}^m \sum_{k=t}^m(P_{k+1}-P_{k})\nabla _w P_t=\sum_{t=1}^m \alpha(P_{t+1}-P_{t})\sum_{k=1}^t \nabla _w P_k Δw=α∑t=1mΔwt=α∑t=1m∑k=tm(Pk+1−Pk)∇wPt=∑t=1mα(Pt+1−Pt)∑k=1t∇wPk
- Δ w t = α ( P t + 1 − P t ) ∑ k = 1 t ∇ w P k \Delta w_t = \alpha(P_{t+1}-P_{t})\sum_{k=1}^t \nabla _w P_k Δwt=α(Pt+1−Pt)∑k=1t∇wPk
- 加入
λ
∈
[
0
,
1
]
\lambda \in [0, 1]
λ∈[0,1]
- Δ w t = α ( P t + 1 − P t ) ∑ k = 1 t λ t − k ∇ w P k \Delta w_t = \alpha(P_{t+1}-P_{t})\sum_{k=1}^t \lambda^{t-k} \nabla _w P_k Δwt=α(Pt+1−Pt)∑k=1tλt−k∇wPk
- 越接近预估时间t权重越大
-
e
t
+
1
=
∑
k
=
1
t
+
1
λ
t
+
1
−
k
∇
w
P
k
=
∇
w
P
t
+
1
+
λ
∑
k
=
1
t
λ
t
−
k
∇
w
P
k
=
∇
w
P
t
+
1
+
λ
e
t
e_{t+1}=\sum_{k=1}^{t+1}\lambda ^{t+1-k} \nabla _w P_k=\nabla _w P_{t+1} + \lambda\sum_{k=1}^{t}\lambda ^{t-k} \nabla _w P_k=\nabla _w P_{t+1} + \lambda e_{t}
et+1=∑k=1t+1λt+1−k∇wPk=∇wPt+1+λ∑k=1tλt−k∇wPk=∇wPt+1+λet
- λ = 0 → α ( P t + 1 − P t ) ∇ w P t \lambda = 0 \rightarrow \alpha(P_{t+1}-P_{t})\nabla _w P_{t} λ=0→α(Pt+1−Pt)∇wPt
python-example:
class multiTDReg:
def __init__(self, feature_dim=7, learning_rate=0.1, time_step=9, lmbda=0.9, incre_update=True):
self.w = np.random.randn(feature_dim).reshape(-1, 1)
self.learning_rate = learning_rate
self.lmbda = lmbda
self.time_step = time_step
self.incre_update = incre_update
def predict(self, x):
return np.matmul(x, self.w)
def get_nabla(self, batch_x):
lmbda = self.lmbda
e_t_list = [0]
for t in range(self.time_step):
e_t_1 = batch_x[:, t, :] + e_t_list[-1] * lmbda
e_t_list.append(e_t_1)
return np.stack(e_t_list[1:], axis=1)
def fit(self, x, y, batch_size=25, n_rounds=100):
n = x.shape[0]
idx = np.arange(n)
tq_bar = tqdm(range(n_rounds))
for round_i in tq_bar:
tq_bar.set_description(f'[ {round_i + 1} / {n_rounds}]')
np.random.shuffle(idx)
idx_l = [min(i, n) for i in range(0, n + batch_size, batch_size)]
for st, ed in zip(idx_l[:-1], idx_l[1:]):
batch_x = x[st:ed, ...]
batch_y = y[st:ed, ...]
p_t = self.predict(batch_x)
p_t_c = np.concatenate([p_t, batch_y[..., np.newaxis]], axis=1)
e = p_t_c[:, :-1, :] - p_t_c[:, 1:, :] # -(p_{t+1} -p_t) # b, time_step, 1
# e \sum_{k=1}^t lmbda^{t-k} \nabla_w P_k
nabla = self.get_nabla(batch_x) # b, time_step, 7
# print(f'{nabla.shape=} {e.shape=}')
if not self.incre_update:
grad = np.matmul(nabla.transpose(0, 2, 1), e).mean(axis=0)
self.w -= self.learning_rate * grad
continue
# incrementally update:
for t in range(self.time_step):
grad_t = nabla[:, t, :] * e[:, t, :]
self.w -= self.learning_rate * grad_t.mean(axis=0).reshape(-1, 1)
3.2 案例
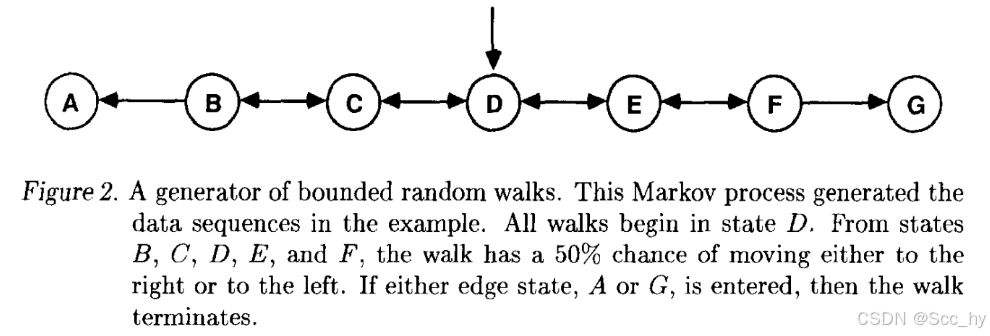
每当数据序列由动态系统(by a system that has a state which evolves and is partially revealed over time.)生成时, TD方法会发挥更大的作用
Random-walk Env example : github: 1988_randomWalk_td.py
P
(
s
=
G
∣
s
=
x
)
→
z
=
E
[
V
(
S
=
x
)
]
P(s=G|s=x) \rightarrow z=E[V(S=x)]
P(s=G∣s=x)→z=E[V(S=x)]
env python example:
class SimpleRandomWalk(gym.Env):
def __init__(self):
super(SimpleRandomWalk, self).__init__()
self.states = ['A', 'B', 'C', 'D', 'E', 'F', 'G']
self.action_space = gym.spaces.Discrete(2, start=0)
self.observation_space = gym.spaces.Discrete(len(self.states))
self.start_state = 'D'
self.current_state = self.start_state
self.rewards = {'A': 0, 'G': 1}
def step(self, action):
index = self.states.index(self.current_state)
if action == 0: # 左移
if index > 0:
self.current_state = self.states[index - 1]
elif action == 1: # 右移
if index < len(self.states) - 1:
self.current_state = self.states[index + 1]
reward = self.rewards.get(self.current_state, 0)
done = self.current_state in ['A', 'G']
return self._state_to_index(self.current_state), reward, done, False, {}
def reset(self):
self.current_state = self.start_state
return self._state_to_index(self.current_state), {}
def render(self, mode='human'):
print(f"Current state: {self.current_state}")
def _state_to_index(self, state):
return self.states.index(state)
Learning result : TD-Reg is mush more easy to learn
- train set (seq nums, seq length):
train_seq_pairs = [ (10, 4), (90, 6), (150, 8), (200, 10), (150, 12), (100, 14), (100, 16), (100, 18), (100, 20), ]

总结
Richard S. Sutton 的这篇论文为时间差分方法奠定了理论基础,并展示了其在多步预测问题中的优势。
TD 方法不仅在理论上具有收敛性和最优性,而且在实际应用中也表现出了更高的效率和更快的收敛速