2024/1/22:
原始EEG信号的生成说实话一直做不到让人满意的水平,之前做的MIEEG复现也迟迟没有调整到自己想要的程度,与论文中的效果还是有些差距。改换思路使用离散小波变换,用变换之后的信号做生成任务则好了许多。从大二开始一直惦记着diffusion 模型相关的EEG信号生成,开题之前去网上搜索并没有看见许多作用于EEG信号的diffusion相关论文,大多数和diffusion挂钩的论文都是做EEG视觉图像重建的。个人认为在EEG信号数据增强方面diffusion还是比较有用武之地的,因此这半个月实现了一下。在自己的原始实现结束后,尝试了使用diffuser库函数进行项目的重写,并获得了不错的成果。
博主复现项目gitee地址:(数据部分等毕业论文写完再考虑,读者可以尝试自己构建,很简单)
reference:
[1] 【大白话01】一文理清 Diffusion Model 扩散模型 | 原理图解+公式推导
[2] deepthoughts: Probabilistic Diffusion Model概率扩散模型理论与完整PyTorch代码详细解读
[3] 李宏毅 Diffusion Model
[4] hugging face 文档【diffusers】
代码部分来源:
手写部分参考reference[2]
diffuser库函数实现部分参考reference[4]
注:
文中的数学推导都是随便记录的,有错漏,想学习的话还是得看对应的视频
目录
- 简单推导
- 一、手写实现diffusion EEG
- 1.1 导入数据
- 1.2 确定超参数的值
- 1.3 确定扩散过程任意一步的采样值
- 1.4 演示原始信号分布加噪step次后的分布
- 1.5 编写逆扩散过程高斯分布的模型
- 1.6 编写训练loss函数
- 1.7 编写逆扩散采样函数(去噪推理过程)
- 1.8 训练模型,打印loss以及中间的重构成果
- 二、diffusers库函数实现diffusion EEG
- 2.1 超参数配置和数据准备
- 2.2 创建训练配置
- 2.3 图像预处理
- 2.4 创建一个 UNet2DModel
- 2.5 模型测试与数据集加载
- 2.6 创建调度程序
- 2.6 训练模型
- 2.7 具体训练代码
- 2.8 启动训练
- 问题记录
简单推导
diffusion的前向马尔可夫过程过程如下:
q
(
x
t
∣
x
t
−
1
)
∼
N
(
α
t
x
t
−
1
,
1
−
α
t
)
q(x_{t}|x_{t-1}) \sim \mathcal{N}(\sqrt{\alpha_{t}} x_{t-1}, 1-\alpha_{t})
q(xt∣xt−1)∼N(αtxt−1,1−αt)
x
t
=
α
t
x
t
−
1
+
1
−
α
t
ϵ
t
−
1
x_{t} = \sqrt{\alpha_{t}} x_{t-1} + \sqrt{1-\alpha_{t}} \epsilon_{t-1}
xt=αtxt−1+1−αtϵt−1
根据递推关系,
x
t
x_{t}
xt又可以表示为(下面公式仅向下递推一级):
x
t
=
α
t
α
t
−
1
x
t
−
2
+
α
t
1
−
α
t
−
1
ϵ
t
−
2
+
1
−
α
t
ϵ
t
−
1
x_{t} = \sqrt{\alpha_{t}} \sqrt{\alpha_{t-1}} x_{t-2} + \sqrt{\alpha_{t}} \sqrt{1-\alpha_{t-1}} \epsilon_{t-2} + \sqrt{1-\alpha_{t}} \epsilon_{t-1}
xt=αtαt−1xt−2+αt1−αt−1ϵt−2+1−αtϵt−1
最后可以推得
x
t
x_{t}
xt与
x
0
x_{0}
x0的关系:
q
(
x
t
∣
x
0
)
∼
N
(
α
t
‾
x
0
,
1
−
α
t
‾
)
q(x_{t}|x_{0}) \sim \mathcal{N}(\sqrt{\overline{\alpha_{t}}} x_{0}, 1-\overline{\alpha_{t}})
q(xt∣x0)∼N(αtx0,1−αt)
x
t
=
α
t
‾
x
0
+
1
−
α
t
‾
ϵ
x_{t} = \sqrt{\overline{\alpha_{t}}} x_{0} + \sqrt{1-\overline{\alpha_{t}}}\epsilon
xt=αtx0+1−αtϵ
其中
α
t
‾
=
∏
i
=
1
t
α
i
\overline{\alpha_{t}} = \prod_{i=1}^{t} \alpha_{i}
αt=∏i=1tαi,
ϵ
\epsilon
ϵ是一个标准正态分布的随机变量。
假设diffusion的反向过程 q ( x t ∣ x t − 1 ) q(x_{t}|x_{t-1}) q(xt∣xt−1)同样服从高斯分布,那么可以得到:
q ( x t − 1 ∣ x t ) = N ( μ t , σ t 2 ) q(x_{t-1}|x_{t}) = \mathcal{N}(\mu_{t}, \sigma_{t}^{2}) q(xt−1∣xt)=N(μt,σt2)
在我们的代码中,需要用神经网络进行拟合,这个过程可以简单表示为
q
θ
(
x
t
−
1
∣
x
t
)
=
N
(
μ
θ
(
x
t
,
t
)
,
σ
θ
2
(
x
t
,
t
)
)
q_{\theta}(x_{t-1}|x_{t}) = \mathcal{N}(\mu_{\theta}(x_{t},t), \sigma_{\theta}^{2}(x_{t},t))
qθ(xt−1∣xt)=N(μθ(xt,t),σθ2(xt,t))
拟合该分布等价于引入
x
0
x_{0}
x0,通过贝叶斯公式可以得到:
q
(
x
t
−
1
∣
x
t
,
x
0
)
=
q
(
x
t
∣
x
t
−
1
)
q
(
x
t
−
1
∣
x
0
)
q
(
x
t
∣
x
0
)
q(x_{t-1}|x_{t},x_{0}) = \frac{q(x_{t}|x_{t-1})q(x_{t-1}|x_{0})}{q(x_{t}|x_{0})}
q(xt−1∣xt,x0)=q(xt∣x0)q(xt∣xt−1)q(xt−1∣x0)
从前面,我们已经可以得到等式右边的三个高斯分布的具体状态,如下:
q
(
x
t
∣
x
t
−
1
)
∼
N
(
α
t
x
t
−
1
,
1
−
α
t
)
q(x_{t}|x_{t-1}) \sim \mathcal{N}(\sqrt{\alpha_{t}} x_{t-1}, 1-\alpha_{t})
q(xt∣xt−1)∼N(αtxt−1,1−αt)
q
(
x
t
−
1
∣
x
0
)
∼
N
(
α
t
−
1
‾
x
0
,
1
−
α
t
−
1
‾
)
q(x_{t-1}|x_{0}) \sim \mathcal{N}(\sqrt{\overline{\alpha_{t-1}}} x_{0}, 1-\overline{\alpha_{t-1}})
q(xt−1∣x0)∼N(αt−1x0,1−αt−1)
q
(
x
t
∣
x
0
)
∼
N
(
α
t
‾
x
0
,
1
−
α
t
‾
)
q(x_{t}|x_{0}) \sim \mathcal{N} (\sqrt{ \overline{\alpha_{t}} x_{0}, 1-\overline{\alpha_{t}} })
q(xt∣x0)∼N(αtx0,1−αt)
因此,我们可以得到:
q
(
x
t
−
1
∣
x
t
,
x
0
)
∼
N
(
x
t
−
1
α
t
(
1
−
α
t
−
1
‾
)
+
α
t
−
1
‾
(
1
−
α
t
)
1
−
α
t
‾
,
(
1
−
α
t
)
(
1
−
α
t
−
1
)
1
−
α
t
‾
)
q(x_{t-1}|x_{t},x_{0}) \sim \mathcal{N}(x_{t-1} \frac{\sqrt{\alpha_{t}(1-\overline{\alpha_{t-1}})} + \sqrt{\overline{\alpha_{t-1}}}(1-\alpha_{t})}{1-\overline{\alpha_{t}}}, \frac{(1-\alpha_{t})(1-\alpha_{t-1})}{1-\overline{\alpha_{t}}})
q(xt−1∣xt,x0)∼N(xt−11−αtαt(1−αt−1)+αt−1(1−αt),1−αt(1−αt)(1−αt−1))
因为该分布的方差是固定的,所以我们只需要拟合均值即可,一开始我也不知道是怎么个拟合均值法,且看下面的代码。
一、手写实现diffusion EEG
1.1 导入数据
from data_preprocessing import *
import matplotlib.pyplot as plt
import matplotlib as mpl
import torch
mpl.rcParams['font.sans-serif'] = ['SimHei']
mpl.rcParams['axes.unicode_minus'] = False
subj = 0
task = 0
subsample = 5
epochs = 200
project_fname = './'
channel_inds = (0, 7, 9, 11, 19)
X_train_cwt_norm = WGAN_preprcessing_method(project_fname, subsample, subj, task, channel_inds)
print(X_train_cwt_norm.shape)
# 将维度转换为[trial, channel, 频段, time]
X_train_cwt_norm = X_train_cwt_norm.transpose(0, 3, 1, 2)
print("转换后的维度:", X_train_cwt_norm.shape)
# 画出一张图
show_trial = 0
show_channel = 0
plt.figure()
plt.imshow(X_train_cwt_norm[show_trial, show_channel, :, :], aspect='auto')
plt.colorbar()
plt.title("归一化CWT真实信号 试次{} 通道{}".format(show_trial, show_channel))
plt.show()
# 转化为tensor
X_train_cwt_norm = torch.tensor(X_train_cwt_norm, dtype=torch.float32)
1.2 确定超参数的值
在之前的简略推导中,有三个关键的分布:
q
(
x
t
∣
x
t
−
1
)
∼
N
(
α
t
x
t
−
1
,
1
−
α
t
)
q(x_{t}|x_{t-1}) \sim \mathcal{N}(\sqrt{\alpha_{t}} x_{t-1}, 1-\alpha_{t})
q(xt∣xt−1)∼N(αtxt−1,1−αt)
q
(
x
t
−
1
∣
x
0
)
∼
N
(
α
t
−
1
‾
x
0
,
1
−
α
t
−
1
‾
)
q(x_{t-1}|x_{0}) \sim \mathcal{N}(\sqrt{\overline{\alpha_{t-1}}} x_{0}, 1-\overline{\alpha_{t-1}})
q(xt−1∣x0)∼N(αt−1x0,1−αt−1)
q
(
x
t
∣
x
0
)
∼
N
(
α
t
‾
x
0
,
1
−
α
t
‾
)
q(x_{t}|x_{0}) \sim \mathcal{N} (\sqrt{ \overline{\alpha_{t}} x_{0}, 1-\overline{\alpha_{t}} })
q(xt∣x0)∼N(αtx0,1−αt)
其实用
a
l
p
h
a
alpha
alpha有点便于推导的意思,但是在原版的公式中,使用的是
β
\beta
β,所以我们在这里也将
β
\beta
β定义出来,方便后续的推导。同时,我们给出了
β
\beta
β与
α
\alpha
α的关系:
β
=
1
−
α
\beta = 1 - \alpha
β=1−α
因此,我么可以得到类似的等价公式:
q
(
x
t
∣
x
t
−
1
)
∼
N
(
α
t
x
t
−
1
,
1
−
α
t
)
∼
N
(
1
−
β
t
x
t
−
1
,
β
t
)
q(x_{t}|x_{t-1}) \sim \mathcal{N}(\sqrt{\alpha_{t}} x_{t-1}, 1-\alpha_{t}) \sim \mathcal{N}(\sqrt{1-\beta_{t}} x_{t-1}, \beta_{t})
q(xt∣xt−1)∼N(αtxt−1,1−αt)∼N(1−βtxt−1,βt)
在下面的代码中,我们会定义以下超参数:
-
num_step:去噪(扩散)步数
-
betas:每一步的 β \beta β值
-
alphas:每一步的 α \alpha α值
-
alphas_prod: α t ‾ \overline{\alpha_{t}} αt的值
-
alphas_prod_p: α t − 1 ‾ \overline{\alpha_{t-1}} αt−1的值
-
alpha_bar_sqrt: α t ‾ \sqrt{\overline{\alpha_{t}}} αt的值
-
one_minus_alpha_bar_log: log ( 1 − α t ‾ ) \log(1-\overline{\alpha_{t}}) log(1−αt)的值
-
one_minus_alpha_bar_sqrt: 1 − α t ‾ \sqrt{1-\overline{\alpha_{t}}} 1−αt的值
需要注意的是, t t t表示这些数组的索引,可以通过索引来获取对应的值。
# 对于step,一开始可以由beta、分布均值和方差确定
num_steps = 1500
# 指定每一步的beta
betas = torch.linspace(-6, 6, num_steps)
betas = torch.sigmoid(betas) * (0.5e-2 - 1e-5) + 1e-5
# 计算alpha、alpha_prod、alpha_prod_previous、alpha_bar_sqrt等变量的值
alphas = 1 - betas
# cumprod是累乘函数
alphas_prod = torch.cumprod(alphas, 0)
alphas_prod_p = torch.cat([torch.tensor([1]), alphas_prod[:-1]], 0)
alpha_bar_sqrt = torch.sqrt(alphas_prod)
one_minus_alpha_bar_log = torch.log(1 - alphas_prod)
one_minus_alpha_bar_sqrt = torch.sqrt(1 - alphas_prod)
# 检查shape
assert betas.shape == alphas.shape == alphas_prod.shape == alphas_prod_p.shape == alpha_bar_sqrt.shape == one_minus_alpha_bar_log.shape == one_minus_alpha_bar_sqrt.shape
print("all the same shape:", betas.shape)
# 画一张2*4的图,每个子图都是一张图
fig, axes = plt.subplots(2, 4, figsize=(40, 20))
axes = axes.flatten()
# 画图,颜色是不同的,字体
for i, (name, data) in enumerate(
zip(["betas", "alphas", "alphas_prod", "alphas_prod_p", "alpha_bar_sqrt", "one_minus_alpha_bar_log",
"one_minus_alpha_bar_sqrt"],
[betas, alphas, alphas_prod, alphas_prod_p, alpha_bar_sqrt, one_minus_alpha_bar_log,
one_minus_alpha_bar_sqrt])):
axes[i].plot(data.numpy(), label=name, color='C{}'.format(i))
axes[i].set_title(name, fontsize=20)
plt.show()
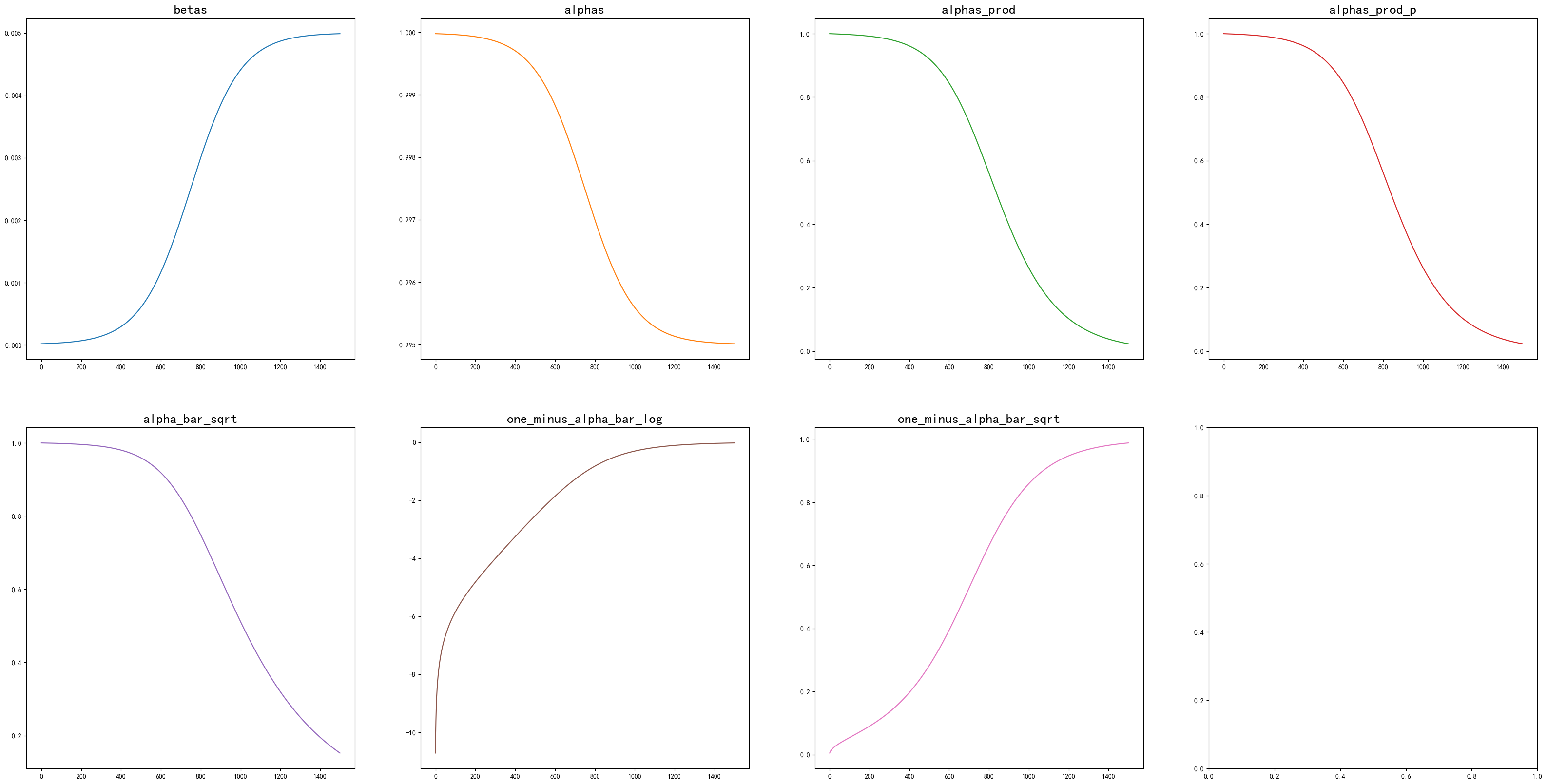
在上面的图中我们可以看到,按照我们定义的公式:
x
t
=
α
t
x
t
−
1
+
1
−
α
t
ϵ
t
−
1
x_{t} = \sqrt{\alpha_{t}} x_{t-1} + \sqrt{1-\alpha_{t}} \epsilon_{t-1}
xt=αtxt−1+1−αtϵt−1
如果我们将
α
t
\alpha_{t}
αt的值从0变化到1,那么从
x
0
x_{0}
x0到
x
t
x_{t}
xt的递推过程中,噪声在图像中所占的成分会逐渐增大,而原始信号的成分会逐渐减小。最后,我们可以看到,噪声的成分占据了整个信号的绝大部分。\
1.3 确定扩散过程任意一步的采样值
根据前文给出的公式:
q
(
x
t
∣
x
0
)
∼
N
(
α
t
‾
x
0
,
1
−
α
t
‾
)
q(x_{t}|x_{0}) \sim \mathcal{N}(\sqrt{\overline{\alpha_{t}}} x_{0}, 1-\overline{\alpha_{t}})
q(xt∣x0)∼N(αtx0,1−αt)
x
t
=
α
t
‾
x
0
+
1
−
α
t
‾
ϵ
x_{t} = \sqrt{\overline{\alpha_{t}}} x_{0} + \sqrt{1-\overline{\alpha_{t}}}\epsilon
xt=αtx0+1−αtϵ
如果我们得到了
x
0
x_{0}
x0的值,我们就可以计算到任意步数
t
t
t之后的
x
t
x_{t}
xt的值,代码如下:
# 计算任意一步的采样值,基于x_0和参数重整化技巧
def q_x(x_0, t):
return alpha_bar_sqrt[t] * x_0 + one_minus_alpha_bar_sqrt[t] * torch.randn_like(x_0)
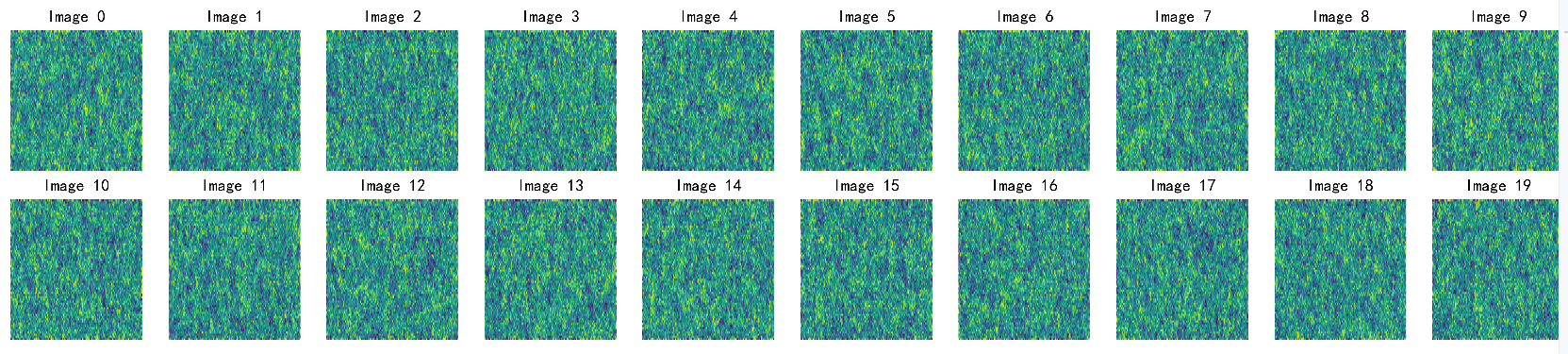
1.4 演示原始信号分布加噪step次后的分布
# 画20张图
num_shows = 20
fig, axes = plt.subplots(2, 10, figsize=(28, 6.5))
plt.rc('text', color='blue')
# 取第一个试次的信号进行加噪
x_0 = X_train_cwt_norm[0][0].squeeze()
print("原始信号的shape:", x_0.shape)
# 只用一个通道的数据测试
# 原始信号的shape: torch.Size([50, 200])
# 生成1000步内每隔num_steps//num_shows步的图
for i in range(num_shows):
# imshow是画图函数
j = i // 10
k = i % 10
# i * num_steps // num_shows是第i张图的步数
# print("第{}步".format(i * num_steps // num_shows))
q_i = q_x(x_0, i * num_steps // num_shows)
axes[j, k].imshow(q_i.numpy(), aspect='auto')
# 相似度保留两位小数
axes[j, k].set_title("step {} 正态度:{:.2f}".format(i * num_steps // num_shows, torch.mean(q_i.pow(2)).item()))
plt.show()
# 检查最后的噪声与正态分布的相似性
q_i = q_x(x_0, num_steps - 1)
print("最后的噪声与正态分布的相似性:", torch.mean(q_i.pow(2)).item())
原始信号的shape: torch.Size([50, 200])
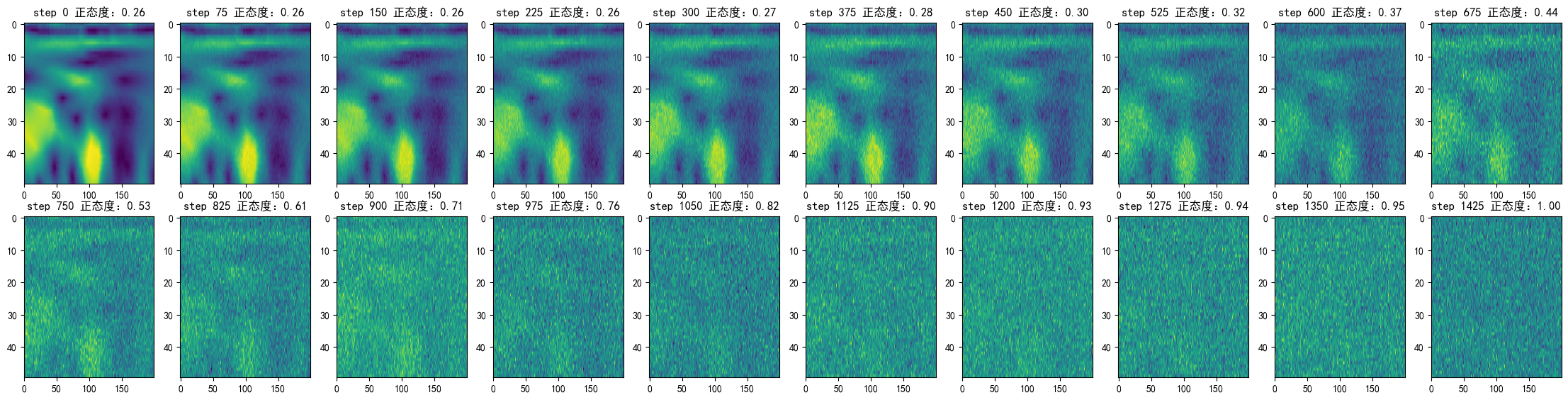
网上没有找到关于numstep的具体设置,个人感觉是numstep需要加到最后的图像为正态分布噪声为止,因此上面取了1500步,上面可以看到最后的噪声与正态分布已经很接近了。
1.5 编写逆扩散过程高斯分布的模型
之前有讲到,我们神经网络是用来拟合均值的,这里给出具体的公式:
μ
θ
(
x
t
,
t
)
=
μ
t
~
(
x
t
,
1
α
t
‾
(
x
t
−
1
−
α
t
‾
ϵ
θ
(
x
t
)
)
=
1
α
t
‾
(
x
t
−
β
t
1
−
α
t
‾
ϵ
θ
(
x
t
,
t
)
)
\mu_{\theta}(x_{t},t) = \widetilde{\mu_{t}}(x_{t}, \frac{1}{ \sqrt{\overline{\alpha_{t} }}} (x_{t}-\sqrt{1-\overline{\alpha_{t}}}\epsilon_{\theta}(x_{t})) = \frac{1}{ \sqrt{\overline{\alpha_{t} }}} (x_{t}- \frac{\beta_{t}}{ \sqrt{1-\overline{\alpha_{t}}}} \epsilon_{\theta}(x_{t}, t))
μθ(xt,t)=μt
(xt,αt1(xt−1−αtϵθ(xt))=αt1(xt−1−αtβtϵθ(xt,t))
在这个公式中,
ϵ
θ
\epsilon_{\theta}
ϵθ就是需要我们用神经网络拟合的部分,而这个神经网络的输入是
x
t
x_{t}
xt和
t
t
t,而神经网络输出的噪声shape应当与
x
t
x_{t}
xt一致。
import torch
import torch.nn as nn
import torch.nn.functional as F
class ResidualConvBlock(nn.Module):
def __init__(
self, in_channels: int, out_channels: int, is_res: bool = False
) -> None:
super().__init__()
'''
standard ResNet style convolutional block
'''
self.same_channels = in_channels == out_channels
self.is_res = is_res
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, 1, 1),
nn.BatchNorm2d(out_channels),
nn.GELU(),
)
self.conv2 = nn.Sequential(
nn.Conv2d(out_channels, out_channels, 3, 1, 1),
nn.BatchNorm2d(out_channels),
nn.GELU(),
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
if self.is_res:
x1 = self.conv1(x)
x2 = self.conv2(x1)
# this adds on correct residual in case channels have increased
if self.same_channels:
out = x + x2
else:
out = x1 + x2
return out / 1.414
else:
x1 = self.conv1(x)
x2 = self.conv2(x1)
return x2
class UnetDown0(nn.Module):
def __init__(self, in_channels, out_channels):
super(UnetDown0, self).__init__()
'''
process and downscale the image feature maps
'''
layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d((1, 4))]
self.model = nn.Sequential(*layers)
def forward(self, x):
return self.model(x)
class UnetDown(nn.Module):
def __init__(self, in_channels, out_channels):
super(UnetDown, self).__init__()
'''
process and downscale the image feature maps
'''
layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d(2)]
self.model = nn.Sequential(*layers)
def forward(self, x):
return self.model(x)
class UnetUp1(nn.Module):
def __init__(self, in_channels, out_channels):
super(UnetUp1, self).__init__()
'''
process and upscale the image feature maps
'''
layers = [
nn.ConvTranspose2d(in_channels, out_channels, 2, 2, output_padding=(1, 1)),
ResidualConvBlock(out_channels, out_channels),
ResidualConvBlock(out_channels, out_channels),
]
self.model = nn.Sequential(*layers)
def forward(self, x, skip):
x = torch.cat((x, skip), 1)
x = self.model(x)
return x
class UnetUp2(nn.Module):
def __init__(self, in_channels, out_channels):
super(UnetUp2, self).__init__()
'''
process and upscale the image feature maps
'''
layers = [
nn.ConvTranspose2d(in_channels, out_channels, 2, 2),
ResidualConvBlock(out_channels, out_channels),
ResidualConvBlock(out_channels, out_channels),
]
self.model = nn.Sequential(*layers)
def forward(self, x, skip):
x = torch.cat((x, skip), 1)
x = self.model(x)
return x
class UnetUp3(nn.Module):
def __init__(self, in_channels, out_channels):
super(UnetUp3, self).__init__()
'''
process and upscale the image feature maps
'''
layers = [
nn.ConvTranspose2d(in_channels, out_channels, (1, 4), (1, 4)),
ResidualConvBlock(out_channels, out_channels),
ResidualConvBlock(out_channels, out_channels),
]
self.model = nn.Sequential(*layers)
def forward(self, x, skip):
x = torch.cat((x, skip), 1)
x = self.model(x)
return x
class EmbedFC(nn.Module):
def __init__(self, input_dim, emb_dim):
super(EmbedFC, self).__init__()
'''
generic one layer FC NN for embedding things
'''
self.input_dim = input_dim
layers = [
nn.Linear(input_dim, emb_dim),
nn.GELU(),
nn.Linear(emb_dim, emb_dim),
]
self.model = nn.Sequential(*layers)
def forward(self, x):
x = x.view(-1, self.input_dim)
return self.model(x)
class Unet(nn.Module):
def __init__(self, in_channels, n_feat=256):
super(Unet, self).__init__()
self.in_channels = in_channels
self.n_feat = n_feat
self.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)
self.down0 = UnetDown0(n_feat, n_feat)
self.down1 = UnetDown(n_feat, n_feat)
self.down2 = UnetDown(n_feat, 2 * n_feat)
# self.down3 = UnetDown(2 * n_feat, 4 * n_feat)
self.to_vec = nn.Sequential(nn.AvgPool2d((12, 12)), nn.GELU())
self.timeembed1 = EmbedFC(1, 2 * n_feat)
self.timeembed2 = EmbedFC(1, 1 * n_feat)
self.up0 = nn.Sequential(
# nn.ConvTranspose2d(6 * n_feat, 2 * n_feat, 7, 7), # when concat temb and cemb end up w 6*n_feat
nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, (12, 12)), # otherwise just have 2*n_feat
nn.GroupNorm(8, 2 * n_feat),
nn.ReLU(),
)
self.up1 = UnetUp1(4 * n_feat, n_feat)
self.up2 = UnetUp2(2 * n_feat, n_feat)
self.up3 = UnetUp3(2* n_feat, n_feat)
self.out = nn.Sequential(
nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1),
nn.GroupNorm(8, n_feat),
nn.ReLU(),
nn.Conv2d(n_feat, self.in_channels, 3, 1, 1),
)
def forward(self, x, t):
'''
输入加噪图像和对应的时间step,预测反向噪声的正态分布
:param x: 加噪图像
:param t: 对应step
:return: 正态分布噪声
'''
x = self.init_conv(x)
# print("x shape:", x.shape)
down0 = self.down0(x)
# print("down0 shape:", down0.shape)
down1 = self.down1(down0)
# print("down1 shape:", down1.shape)
down2 = self.down2(down1)
# print("down2 shape:", down2.shape)
hiddenvec = self.to_vec(down2)
# print("hiddenvec shape:", hiddenvec.shape)
# embed time step
# print("t shape:", t.shape)
temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)
# print("temb1 shape:", temb1.shape)
temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)
# print("temb2 shape:", temb2.shape)
temb3 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)
# 将上采样输出与step编码相加,输入到下一个上采样层
up1 = self.up0(hiddenvec)
# print("up1 shape:", up1.shape)
up2 = self.up1(up1 + temb1, down2)
# print("up2 shape:", up2.shape)
up3 = self.up2(up2 + temb2, down1)
# print("up3 shape:", up3.shape)
up4 = self.up3(up3 + temb3, down0)
# print("up4 shape:", up4.shape)
out = self.out(torch.cat((up4, x), 1))
return out
# 测试部分
batch_size = 4 # 可以调整
in_channels = 5 # 输入通道数
x = torch.randn(batch_size, in_channels, 50, 200) # 输入的随机张量
t = torch.randn(batch_size, 1) # 随机时间步
# 初始化模型
model = Unet(in_channels)
print("x shape:", x.shape)
print("t shape:", t.shape)
# 前向传播
output = model(x, t)
# 打印输出形状
print(f'输出形状: {output.shape}')
x shape: torch.Size([4, 5, 50, 200])
t shape: torch.Size([4, 1])
输出形状: torch.Size([4, 5, 50, 200])
1.6 编写训练loss函数
神经网络中的loss由以下公式计算,这里暂且省略复杂的推导过程:
L
s
i
m
p
l
e
(
θ
)
:
=
E
t
,
x
0
,
ϵ
[
∣
∣
ϵ
−
ϵ
θ
(
α
t
‾
x
0
+
1
−
α
t
‾
ϵ
,
t
)
∣
∣
2
]
L_{simple}(\theta) := \mathbb{E}_{t,x_{0},\epsilon}[ || \epsilon - \epsilon_{\theta}( \sqrt{\overline{\alpha_{t}}} x_{0} + \sqrt{1-\overline{\alpha_{t}}}\epsilon,t ) ||^{2} ]
Lsimple(θ):=Et,x0,ϵ[∣∣ϵ−ϵθ(αtx0+1−αtϵ,t)∣∣2]
这里说明一点,训练是一个马尔可夫前向的过程,属于diffusion model的真实图像到噪声的阶段,使用神经网络训练时
x
0
x_{0}
x0是已知的,故不需要代换掉。而在下面的代码中,epsilon是一个标准正态分布的随机变量,我们可以通过torch.randn_like(x_0)来生成。
这里讲一下我是如何在直觉上理解该公式的:
我们代码中定义的噪声epislon是在diffusion的前向过程中作用在 x 0 x_0 x0上通过公式将其按照 t t t转变为 x t x_t xt的噪声,我们神经网络的目标就是通过 x t x_t xt和 t t t来预测出这个噪声,所以我们的loss就是预测的噪声与真实噪声的差值。我们需要让神经网络拟合这个噪声的原因是,加噪和去噪在直觉上是一个逆过程(虽然数学的推导并没有这么简单),只要拿到 x 0 x_0 x0走 t t t步的噪声(当t到一个很大的程度,比如我们的nums_steps时, x t x_t xt(这时候也可以称为 x T x_T xT)近似为正态分布),那么我们就可以通过这个加噪过程的噪声,以正态分布为起点来做一个逆过程的去噪,以此来得到新样本。
我一开始也对“为什么需要随机取t”存在疑问,而这本质上是没有理解我们需要预测的噪声是哪种噪声。其实从前面的公式看:
x
t
=
α
t
x
t
−
1
+
1
−
α
t
ϵ
t
−
1
x_{t} = \sqrt{\alpha_{t}} x_{t-1} + \sqrt{1-\alpha_{t}} \epsilon_{t-1}
xt=αtxt−1+1−αtϵt−1
然后递推得到:
x
t
=
α
t
‾
x
0
+
1
−
α
t
‾
ϵ
x_{t} = \sqrt{\overline{\alpha_{t}}} x_{0} + \sqrt{1-\overline{\alpha_{t}}}\epsilon
xt=αtx0+1−αtϵ
x
0
x_0
x0到
x
t
x_t
xt是可以一步到位的,并且我们最终的逆向过程需要的也是这个一步到位的噪声(就是在上一小节的公式末尾中我们提到的
ϵ
θ
(
x
t
,
t
)
\epsilon_{\theta}(x_{t}, t)
ϵθ(xt,t)),而不是中间一步一步的噪声,所以我们需要随机取t来提高训练效率,但是个人感觉不随机也没有太大问题。
def diffusion_loss_fn(model, x_0, alphas_bar_sqrt, one_minus_alpha_bar_sqrt, n_steps, device):
"""
对任意时刻的t进行采样计算来训练loss
"""
# 为batch_size 随机采样一个时刻t,为了提高训练效率,保证t不重复
t = torch.randint(0, n_steps, size=(batch_size//2,), device=device) # 指定设备
t = torch.cat([t, n_steps-1-t], dim=0)
t = t.unsqueeze(-1)
# x_0的系数
a = alphas_bar_sqrt[t].to(device) # 确保在同一设备上
# epislon的系数
aml = one_minus_alpha_bar_sqrt[t].to(device) # 确保在同一设备上
# 生成随机噪声
epsilon = torch.randn_like(x_0, device=device) # 确保噪声也在同一设备上
# 构建模型输入
x_t = a.view(-1, 1, 1, 1) * x_0 + aml.view(-1, 1, 1, 1) * epsilon
x_t = x_t.to(dtype=torch.float32)
t = t.to(dtype=torch.float32) # 确保 t 在同一设备上
# 导入模型,得到t时刻的随机噪声预测值
output = model(x_t, t)
# 与真实噪声一起计算误差,求平均值
return (epsilon - output).square().mean()
1.7 编写逆扩散采样函数(去噪推理过程)
在简单推导的最后,提到了这样一个公式作为逆扩散的噪声:
q
(
x
t
−
1
∣
x
t
,
x
0
)
∼
N
(
x
t
−
1
α
t
(
1
−
α
t
−
1
‾
)
+
α
t
−
1
‾
(
1
−
α
t
)
1
−
α
t
‾
,
(
1
−
α
t
)
(
1
−
α
t
−
1
)
1
−
α
t
‾
)
q(x_{t-1}|x_{t},x_{0}) \sim \mathcal{N}(x_{t-1} \frac{\sqrt{\alpha_{t}(1-\overline{\alpha_{t-1}})} + \sqrt{\overline{\alpha_{t-1}}}(1-\alpha_{t})}{1-\overline{\alpha_{t}}}, \frac{(1-\alpha_{t})(1-\alpha_{t-1})}{1-\overline{\alpha_{t}}})
q(xt−1∣xt,x0)∼N(xt−11−αtαt(1−αt−1)+αt−1(1−αt),1−αt(1−αt)(1−αt−1))
下面的p_sample函数中,涉及到了之前我们提过的均值拟合:
μ
θ
(
x
t
,
t
)
=
μ
t
~
(
x
t
,
1
α
t
‾
(
x
t
−
1
−
α
t
‾
ϵ
θ
(
x
t
)
)
=
1
α
t
‾
(
x
t
−
β
t
1
−
α
t
‾
ϵ
θ
(
x
t
,
t
)
)
\mu_{\theta}(x_{t},t) = \widetilde{\mu_{t}}(x_{t}, \frac{1}{ \sqrt{\overline{\alpha_{t} }}} (x_{t}-\sqrt{1-\overline{\alpha_{t}}}\epsilon_{\theta}(x_{t})) = \frac{1}{ \sqrt{\overline{\alpha_{t} }}} (x_{t}- \frac{\beta_{t}}{ \sqrt{1-\overline{\alpha_{t}}}} \epsilon_{\theta}(x_{t}, t))
μθ(xt,t)=μt
(xt,αt1(xt−1−αtϵθ(xt))=αt1(xt−1−αtβtϵθ(xt,t))
该公式提到了从
x
t
x_{t}
xt逆扩散至
x
t
−
1
x_{t-1}
xt−1过程中的均值规定,与此同时,方差不涉及到任何一个样本和未知量,是一个确定的值。在下面的代码中,我们将不断使用p_sample函数得到每一步逆扩散的均值然后得到逆扩散噪声,直至逆扩散至
x
0
x_{0}
x0。
def p_sample_loop(model, shape, n_steps, betas, one_minus_alpha_bar_sqrt):
"""
从x_T逆扩散至x_{T-1}、x_{T-2}、...、x_0
"""
cur_x = torch.randn(shape) # 将张量初始化到指定设备
x_seq = [cur_x]
for i in reversed(range(n_steps)):
cur_x = p_sample(model, cur_x, i, betas, one_minus_alpha_bar_sqrt)
x_seq.append(cur_x)
return x_seq
def p_sample(model, x, t, betas, one_minus_alpha_bar_sqrt):
"""
从x_T采样至t时刻的样本
"""
t = torch.tensor([t])
# 确保 betas 和 one_minus_alpha_bar_sqrt 在正确设备上
# 使用 t 索引 betas 和 one_minus_alpha_bar_sqrt
coeff = betas[t] / one_minus_alpha_bar_sqrt[t] # 确保 betas 和 one_minus_alpha_bar_sqrt 在相同设备上
with torch.no_grad():
eps_theta = model(x.to(device), t.to(dtype=torch.float32).to(device)) # 计算模型输出
mean = (1 / (1 - betas[t].cpu())) * (x.cpu() - coeff.cpu() * eps_theta.cpu()) # 计算均值
z = torch.randn_like(x) # 确保噪声张量 z 在相同的设备上
sigma_t = betas[t].sqrt() # 计算标准差
sample = mean + sigma_t.cpu() * z # 生成样本
return sample
1.8 训练模型,打印loss以及中间的重构成果
接下来应该没什么需要解释的东西了
import torch
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader
# 构建一个参数平滑器
class EMA():
def __init__(self, mu=0.01):
self.mu = mu
self.shadow = {}
def register(self, name, val):
self.shadow[name] = val.clone()
def __call__(self, name, x):
assert name in self.shadow
new_average = (1.0 - self.mu) * self.shadow[name] + self.mu * x
self.shadow[name] = new_average.clone()
return new_average
print("training...")
batch_size = 18
dataloaders = torch.utils.data.DataLoader(X_train_cwt_norm, batch_size=batch_size, shuffle=True)
num_epoch = 1000
plt.rc('text', color='blue')
# 使用 CUDA,如果可用的话
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 将模型移到 GPU
model = Unet(in_channels).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
# EMA实例
ema = EMA()
# 假设 alpha_bar_sqrt, one_minus_alpha_bar_sqrt 已经在设备上
alpha_bar_sqrt = alpha_bar_sqrt.to(device) # 确保在同一设备上
one_minus_alpha_bar_sqrt = one_minus_alpha_bar_sqrt.to(device) # 确保在同一设备上
betas = betas.to(device) # betas 也需要在同一设备上
from tqdm import tqdm
# 在外层循环中初始化进度条
with tqdm(range(num_epoch), desc='Epochs') as pbar_epoch:
for t in pbar_epoch:
# 在每个 epoch 内部循环
for idx, batch_x in enumerate(dataloaders):
batch_x = batch_x.to(device) # 将 batch_x 移动到正确设备上
optimizer.zero_grad()
# 计算损失并进行反向传播
loss = diffusion_loss_fn(model, batch_x, alpha_bar_sqrt, one_minus_alpha_bar_sqrt, num_steps, device)
loss.backward()
# 梯度裁剪
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)
# 更新参数
optimizer.step()
# 每次 epoch 完成后更新外层进度条
pbar_epoch.set_postfix({'Epoch': t + 1})
# 更新EMA
"""for name, param in model.named_parameters():
if param.requires_grad:
ema(name, param.data)
# 更新进度条信息,显示当前批次的损失
pbar.set_postfix(loss=loss.item())"""
# 每100个epoch打印一次
if (t + 1) % 100 == 0:
print("Epoch {} Loss: {:.4f}".format(t + 1, loss.item()))
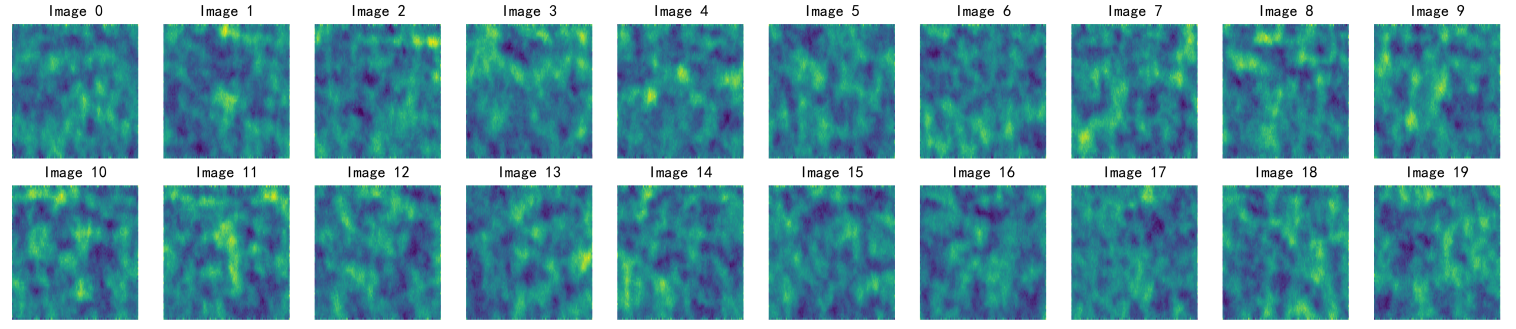
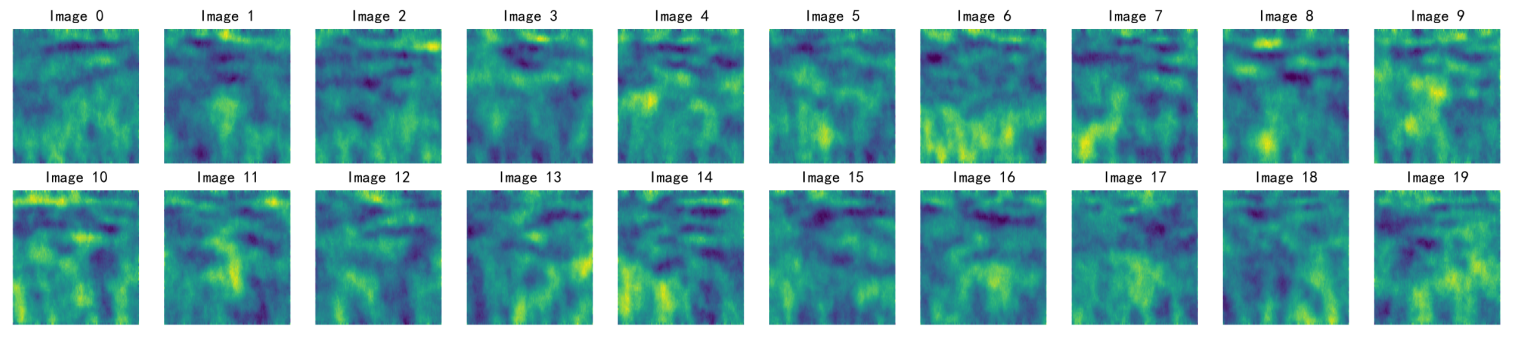
# 生成图像并显示
x_seq = p_sample_loop(model, batch_x.shape, num_steps, betas, one_minus_alpha_bar_sqrt)
fig, axes = plt.subplots(1, 10, figsize=(28, 3.2))
# nums_steps//10步生成一张图
for i in range(10):
x_pic = x_seq[i * num_steps // 10][0][0].squeeze().detach().cpu().numpy()
axes[i].imshow(x_pic, aspect='auto')
axes[i].set_title("epoch {} step {}".format(t + 1, i * num_steps // 10))
plt.show()
"""
50 * 200
x shape: torch.Size([8, 5, 50, 200])
t shape: torch.Size([8, 1])
x shape: torch.Size([8, 256, 50, 200])
down0 shape: torch.Size([8, 256, 50, 50])
down1 shape: torch.Size([8, 256, 25, 25])
down2 shape: torch.Size([8, 512, 12, 12])
hiddenvec shape: torch.Size([8, 512, 1, 1])
temb1 shape: torch.Size([8, 512, 1, 1])
temb2 shape: torch.Size([8, 256, 1, 1])
up1 shape: torch.Size([8, 512, 12, 12])
up2 shape: torch.Size([8, 256, 25, 25])
up3 shape: torch.Size([8, 256, 50, 50])
up4 shape: torch.Size([8, 256, 50, 200])
输出形状: torch.Size([8, 5, 50, 200])
"""
这代码折腾了很久,之前出现了to.(cuda)加错位置导致爆显存的问题——深度学习做了两三年第一次碰到爆显存。解决该问题之后,笔电3060还是爆显存。迫不得已去autodl租了张4090跑,结果也没快到哪里去——初步判断是我的神经网络的某几层参数量过大导致的,这个Unet可能需要之后再优化。
最后跑了500轮出来效果一般,差不多跟前面加噪100层差不多,原来是想跑2000轮的,但是程序无error提示直接退出了。查看了一下AutoPanel,内存的使用大小随着训练的进行呈现阶段性提升,可能代码在内存方面存在一定的问题。加之跑一轮——尤其是生成图片样本的推理时间长的离谱,因此简单贴一下500epoch的结果。





其实结果也算有模有样,如果跑2000轮效果估计还会好一点。
二、diffusers库函数实现diffusion EEG
手写部分大概花了我两天左右,调试和debug差不多又花了一天,结果跑出来一般。diffusers的实现基本完全参考了官方文档和部分源码,只花了我一下午的时间就做到了不错的成果,果然还是要依靠前人的智慧。
详细的提示等官方文档里都有,这里不多说了。
2.1 超参数配置和数据准备
from data_preprocessing import *
import matplotlib.pyplot as plt
import matplotlib as mpl
import torch
mpl.rcParams['font.sans-serif'] = ['SimHei']
mpl.rcParams['axes.unicode_minus'] = False
subj = 0
task = 0
subsample = 5
project_fname = './'
pic_dir = os.path.join('./model_pic/DDPM/', 'suj' + str(subj), 'task' + str(task))
output_dir = './model_checkpoints/ckpt-DDPN/'
print("图片输出文件夹:", pic_dir)
print("模型输出文件夹:", output_dir)
os.makedirs(pic_dir, exist_ok=True)
channel_inds = (0, 7, 9, 11, 19)
图片输出文件夹: ./model_pic/DDPM/suj0/task0
模型输出文件夹: ./model_checkpoints/ckpt-DDPN/
X_train_cwt_norm = WGAN_preprcessing_method(project_fname, subsample, subj, task, channel_inds)
print(X_train_cwt_norm.shape)
# 将维度转换为[trial, channel, 频段, time]
X_train_cwt_norm = X_train_cwt_norm.transpose(0, 3, 1, 2)
# 将第三个维度
print("转换后的维度:", X_train_cwt_norm.shape)
# 画出一张图
show_trial = 0
show_channel = 0
plt.figure()
plt.imshow(X_train_cwt_norm[show_trial, show_channel, :, :], aspect='auto')
plt.colorbar()
plt.title("归一化CWT真实信号 试次{} 通道{}".format(show_trial, show_channel))
plt.show()
# 转化为tensor
X_train_cwt_norm = torch.tensor(X_train_cwt_norm, dtype=torch.float32)
/tmp/pycharm_project_425
Shapes: x = (360, 22, 200, 1), y = (360,), person = (360,)
正在进行离散 CWT 卷积…
试次: 100%|██████████| 360/360 [00:04<00:00, 82.69it/s]
X_cwt_norm = (360, 50, 200, 5)
(360, 50, 200, 5)
转换后的维度: (360, 5, 50, 200)
2.2 创建训练配置
为方便起见,创建一个 TrainingConfig 类,其中包含训练超参数。如果需要使用自己的数据集,更改image_size等相关参数即可。
from dataclasses import dataclass
@dataclass
class TrainingConfig:
# 图像尺寸
image_size = (64, 256)
# 训练批次大小
train_batch_size = 36
# 评估批次大小
eval_batch_size = 36
# 训练轮数
num_epochs = 50
# 梯度累积步数(累计几次梯度更新一次参数)
gradient_accumulation_steps = 1
# 学习率
learning_rate = 1e-4
# 学习率衰减
lr_warmup_steps = 500
save_image_epochs = 10
save_model_epochs = 30
mixed_precision = "no" # `no` for float32, `fp16` for automatic mixed precision
output_dir = output_dir
# 是否上传模型到HF Hub
push_to_hub = False # whether to upload the saved model to the HF Hub
hub_model_id = "hibiscus/test_model" # the name of the repository to create on the HF Hub
hub_private_repo = None
overwrite_output_dir = True # overwrite the old model when re-running the notebook
seed = 42
config = TrainingConfig()
2.3 图像预处理
diffusers库中规定,输入Unet的图像边长必须为64及其倍数,故这里扩张了一下。
# 预处理保证图像尺寸正确
from torchvision import transforms
preprocess = transforms.Compose([
transforms.Resize(config.image_size),
])
def transform_image(img):
return preprocess(img)
X_train_cwt_norm = transform_image(X_train_cwt_norm)
print("转换后的维度:", X_train_cwt_norm.shape)
转换后的维度: torch.Size([360, 5, 64, 256])
2.4 创建一个 UNet2DModel
from diffusers import UNet2DModel
model = UNet2DModel(
sample_size=config.image_size, # the target image resolution
in_channels=5, # the number of input channels, 3 for RGB images
out_channels=5, # the number of output channels
layers_per_block=2, # how many ResNet layers to use per UNet block
block_out_channels=(128, 128, 256, 256, 512, 512), # the number of output channels for each UNet block
down_block_types=(
"DownBlock2D", # a regular ResNet downsampling block
"DownBlock2D",
"DownBlock2D",
"DownBlock2D",
"AttnDownBlock2D", # a ResNet downsampling block with spatial self-attention
"DownBlock2D",
),
up_block_types=(
"UpBlock2D", # a regular ResNet upsampling block
"AttnUpBlock2D", # a ResNet upsampling block with spatial self-attention
"UpBlock2D",
"UpBlock2D",
"UpBlock2D",
"UpBlock2D",
),
)
2.5 模型测试与数据集加载
# 测试输入输出
# 选取采样通道
sample_channel = 0
sample_image = X_train_cwt_norm[0].unsqueeze(0)
print("输入图像维度:", sample_image.shape)
print("Output shape:", model(sample_image, timestep=0).sample.shape)
输入图像维度: torch.Size([1, 5, 64, 256])
Output shape: torch.Size([1, 5, 64, 256])
import torch
from torch.utils.data import DataLoader, Dataset
train_dataloader = DataLoader(X_train_cwt_norm, batch_size=config.train_batch_size, shuffle=True)
2.6 创建调度程序
测试得到num_train_timesteps的合适值,查看加噪后的图像分布
import torch
from diffusers import DDPMScheduler
test_noise_steps = 100
noise_scheduler = DDPMScheduler(num_train_timesteps=1000)
noise = torch.randn(sample_image.shape)
timesteps = torch.LongTensor([test_noise_steps])
noisy_image = noise_scheduler.add_noise(sample_image, noise, timesteps)
# 每加噪100步的图像,画出一张图,一共10张
fig, axs = plt.subplots(1, 10, figsize=(20, 2))
for i in range(0, 10):
timesteps = torch.LongTensor([test_noise_steps*i])
noisy_image = noise_scheduler.add_noise(sample_image, noise, timesteps)
axs[i].imshow(noisy_image[0, 0, :, :].detach().numpy(), aspect='auto')
axs[i].axis("off")
axs[i].set_title(f"Step {i * 100}")

diffusers库中的加噪函数显然比自己手写的方式更快达到正态噪声的效果,不知道采取了什么方案。
2.6 训练模型
创建优化器和学习率调度程序:
from diffusers.optimization import get_cosine_schedule_with_warmup
optimizer = torch.optim.AdamW(model.parameters(), lr=config.learning_rate)
lr_scheduler = get_cosine_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=config.lr_warmup_steps,
num_training_steps=(len(train_dataloader) * config.num_epochs),
)
构造评估模型的方法,使用 DDPMPipeline 生成一批样本图像并将其保存为图片。这里有个比较大的坑,DDPMpipeline默认的输出为一个PIL image list且支支持3通道,需要手动加一下output_type="np.array"才能输出多通道的np.array类型数据,jupyter运行的时候这里报错居然不显示,因此花了一段较长的时间找bug。
from diffusers import DDPMPipeline
from diffusers.utils import make_image_grid
import os
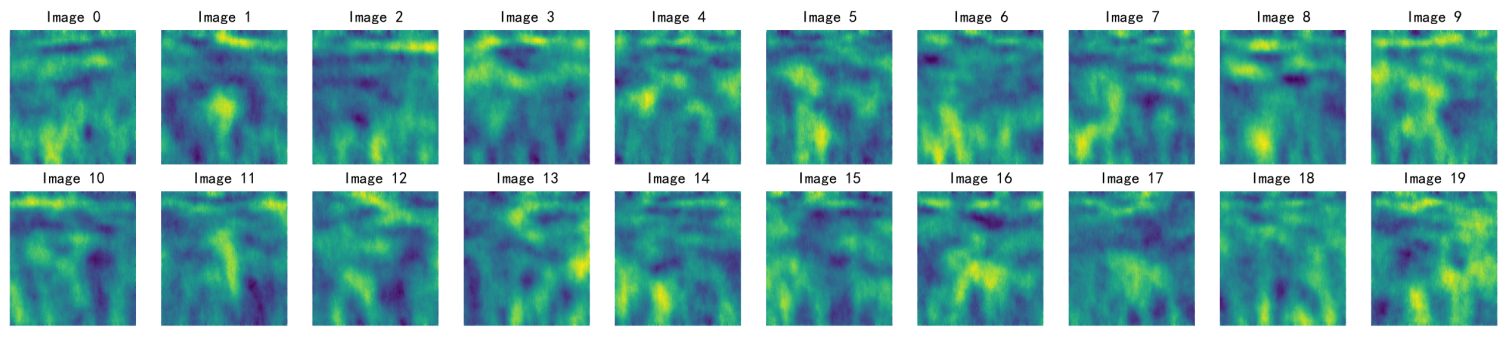
def evaluate(config, epoch, pipeline):
# 从随机噪声中生成一些图像(这是反向扩散过程)。
# 默认的管道输出类型是 `List[torch.Tensor]`
# 取sample_channel来展示
# print("生成图像......")
images = pipeline(
batch_size=config.eval_batch_size,
generator=torch.Generator(device='cpu').manual_seed(config.seed), # 使用单独的 torch 生成器来避免回绕主训练循环的随机状态
output_type="np.array",
).images
print("生成图像维度:", images.shape)
# (batch, height, width, channel)
# 将生成的eval_batch_size个图像拼接成一张大图
pig, ax = plt.subplots(2, 10, figsize=(20, 4))
for i in range(2):
for j in range(10):
ax[i, j].imshow(images[i * 10 + j, :, :, sample_channel], aspect='auto')
ax[i, j].axis("off")
ax[i, j].set_title(f"Image {i * 10 + j}")
plt.savefig(f"{pic_dir}/{epoch:04d}.png", dpi=400)
plt.close()
2.7 具体训练代码
from accelerate import Accelerator
import torch.nn.functional as F
from huggingface_hub import create_repo, upload_folder
from tqdm.auto import tqdm
from pathlib import Path
import os
def train_loop(config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler):
# Initialize accelerator and tensorboard logging
accelerator = Accelerator(
mixed_precision=config.mixed_precision,
gradient_accumulation_steps=config.gradient_accumulation_steps,
log_with="tensorboard",
project_dir=os.path.join(config.output_dir, "logs"),
)
if accelerator.is_main_process:
if config.output_dir is not None:
os.makedirs(config.output_dir, exist_ok=True)
if config.push_to_hub:
repo_id = create_repo(
repo_id=config.hub_model_id or Path(config.output_dir).name, exist_ok=True
).repo_id
accelerator.init_trackers("train_example")
# Prepare everything
# There is no specific order to remember, you just need to unpack the
# objects in the same order you gave them to the prepare method.
model, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, lr_scheduler
)
global_step = 0
# Now you train the model
for epoch in range(config.num_epochs):
progress_bar = tqdm(total=len(train_dataloader), disable=not accelerator.is_local_main_process)
progress_bar.set_description(f"Epoch {epoch}")
for step, batch in enumerate(train_dataloader):
clean_images = batch
# Sample noise to add to the images
noise = torch.randn(clean_images.shape, device=clean_images.device)
bs = clean_images.shape[0]
# Sample a random timestep for each image
timesteps = torch.randint(
0, noise_scheduler.config.num_train_timesteps, (bs,), device=clean_images.device,
dtype=torch.int64
)
# Add noise to the clean images according to the noise magnitude at each timestep
# (this is the forward diffusion process)
noisy_images = noise_scheduler.add_noise(clean_images, noise, timesteps)
with accelerator.accumulate(model):
# Predict the noise residual
noise_pred = model(noisy_images, timesteps, return_dict=False)[0]
loss = F.mse_loss(noise_pred, noise)
accelerator.backward(loss)
if accelerator.sync_gradients:
accelerator.clip_grad_norm_(model.parameters(), 1.0)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
progress_bar.update(1)
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0], "step": global_step}
progress_bar.set_postfix(**logs)
accelerator.log(logs, step=global_step)
global_step += 1
# After each epoch you optionally sample some demo images with evaluate() and save the model
if accelerator.is_main_process:
pipeline = DDPMPipeline(unet=accelerator.unwrap_model(model), scheduler=noise_scheduler)
if (epoch + 1) % config.save_image_epochs == 0 or epoch == config.num_epochs - 1:
evaluate(config, epoch, pipeline)
if (epoch + 1) % config.save_model_epochs == 0 or epoch == config.num_epochs - 1:
if config.push_to_hub:
upload_folder(
repo_id=repo_id,
folder_path=config.output_dir,
commit_message=f"Epoch {epoch}",
ignore_patterns=["step_*", "epoch_*"],
)
else:
pipeline.save_pretrained(config.output_dir)
2.8 启动训练
from accelerate import notebook_launcher
args = (config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler)
notebook_launcher(train_loop, args, num_processes=1)
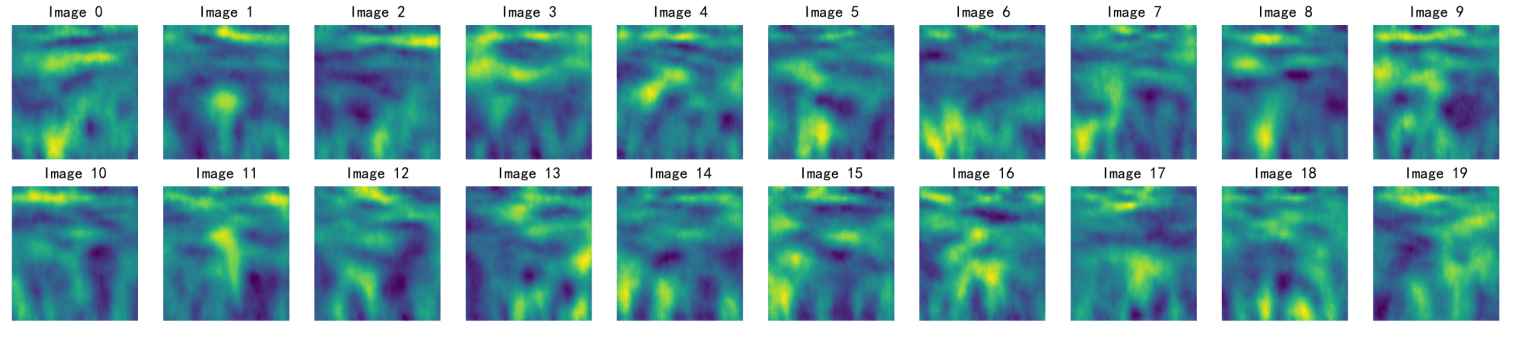
按照上面的config,一共训练了50轮,每10轮生成一批图像,效果远比手写500epoch生成的图像质量更好,训练得到结果如下:
问题记录
在跑手写实现模型的时候遇到了显存爆炸但是gpu无占用的问题,具体表现如下:
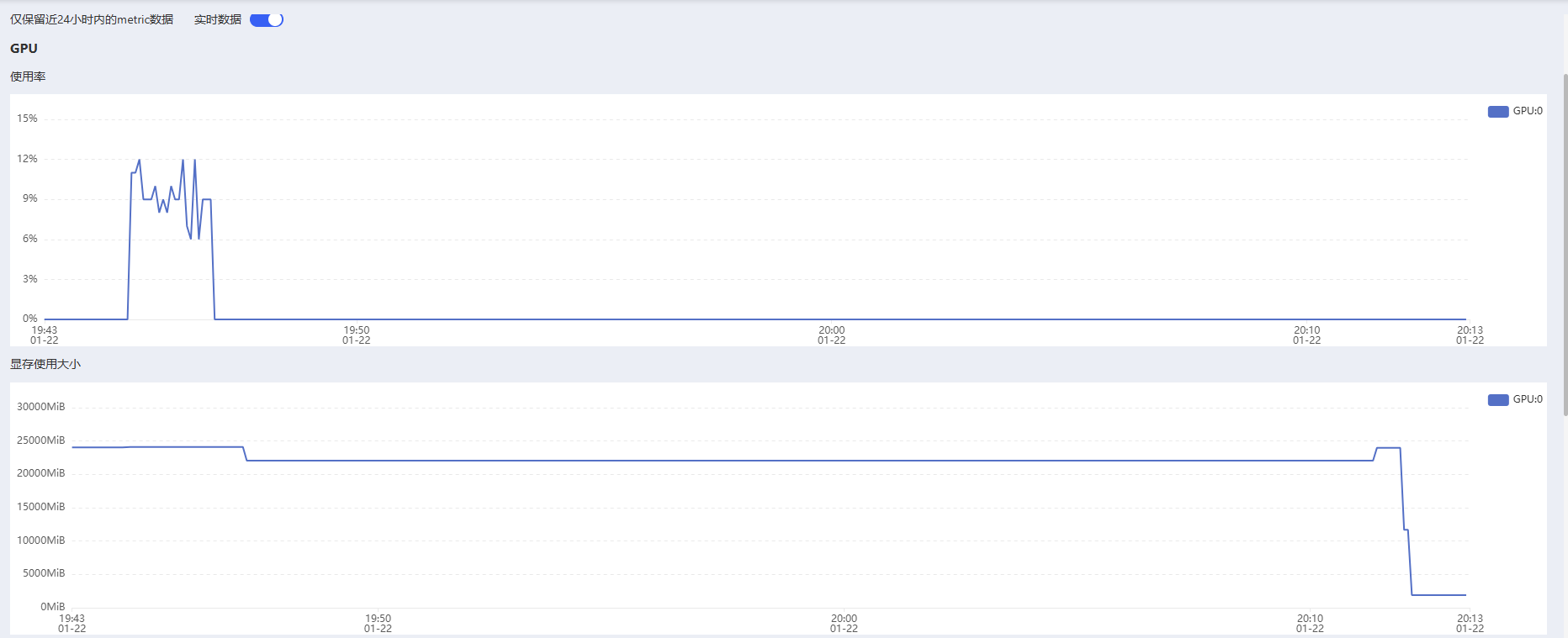
后面的显存回落是解决问题后的成果。比较令人费解的是,根据网络上大火说的,nvidia-smi 命令执行之后,应当会列出当前所有使用进程所使用的GPU memory大小,而我这里显示的却全是占用0MiB,这误导了我很久。
问题的具体影响有:
在问题出现之前batch_size=64可以正常运行,但是问题出现后改成更小的batch_size也会立刻报显存爆炸的error。

我是使用本机的pycharm上的jupyter使用ssh连接autodl上实例来跑代码的。原来以为是僵尸进程占用了gpu,但是后来排查发现不存在僵尸进程。最后确认问题的原因还是出在jupyter上:
如果jupyter进程异常结束,则会出现显存占用不释放的情况,而jupyter进程就是nvidia-smi 命令执行之后显示的那几个进程,全部使用kill -9 进程pid结束掉即可。
至于为什么nvidia-smi 命令并未显示真实的显存占用,这点暂时还不清楚。
这次实践过程还是收获挺大的,提高了一点看源码和文档的能力,顺便熟悉了一下latex公式的编写。这块地方暂时就告一段落了,下一次尝试一下提升diffusers的性能或者改进一下Unet。


















![[Linux] 进程管理与调度机制](https://i-blog.csdnimg.cn/direct/4c307892f97e44888c1e66f857449f9e.jpeg)
