对数据进行可视化有很多好处,比如可以帮助我们快速判断机器人运动轨迹是否平滑。
一般来说,我们会将数据保存为文件,然后进行绘图,但是在ROS中,有一个很好用的工具,叫rqt_plot,用它可以快速实现数据的可视化,帮助我们观察数据的变化趋势。以baxter机器人为例:
-
找到感兴趣的话题
首先查看我们感兴趣的话题,使用命令:
rostopic list查看话题,在这里我以/robot/joint_states为例
-
查看话题具体要绘制的内容
查看该话题具体的内容:
rostopic echo /robot/joint_states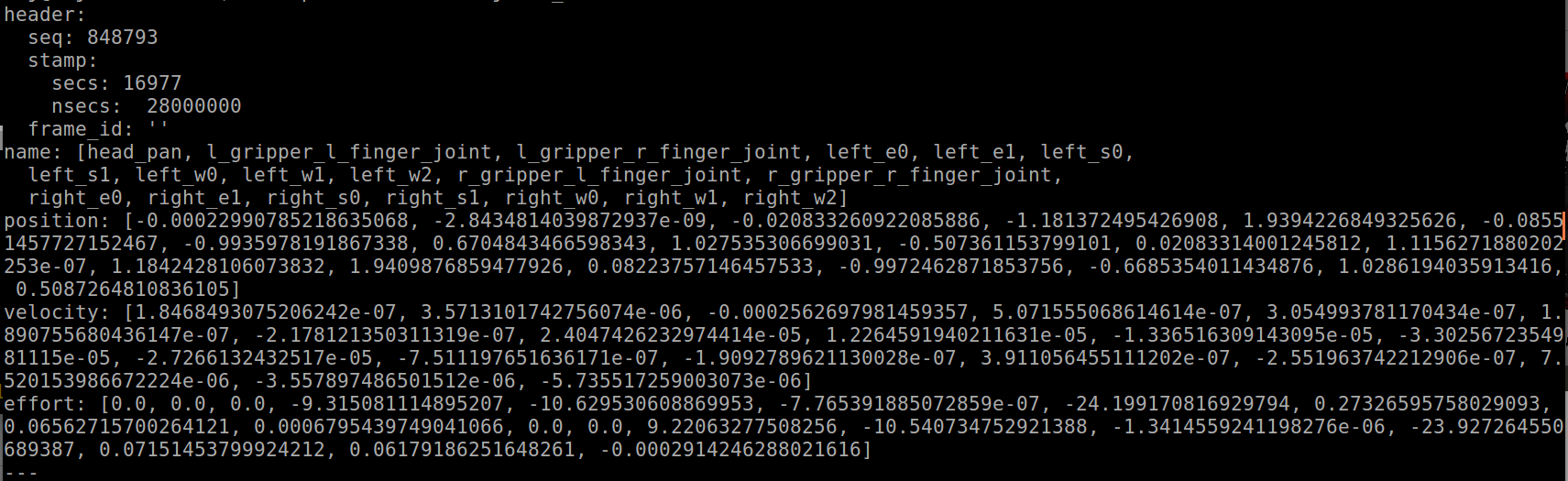
可见,该话题包含数据相关的内容有
position、velocity、effort等,并且容易知道,position对应的描述等对应name中的各项,如果我要取左臂各关节的角度,对比可知为position[3]——position[9] -
使用
rqt_plot进行数据可视化新开一个窗口,输入
rqt_plot /robot/joint_states/position[3]:position[4]:position[5]:position[6]:position[7]:position[8]:position[9],可以在一张图上同时显示各关节角度的变化,实时!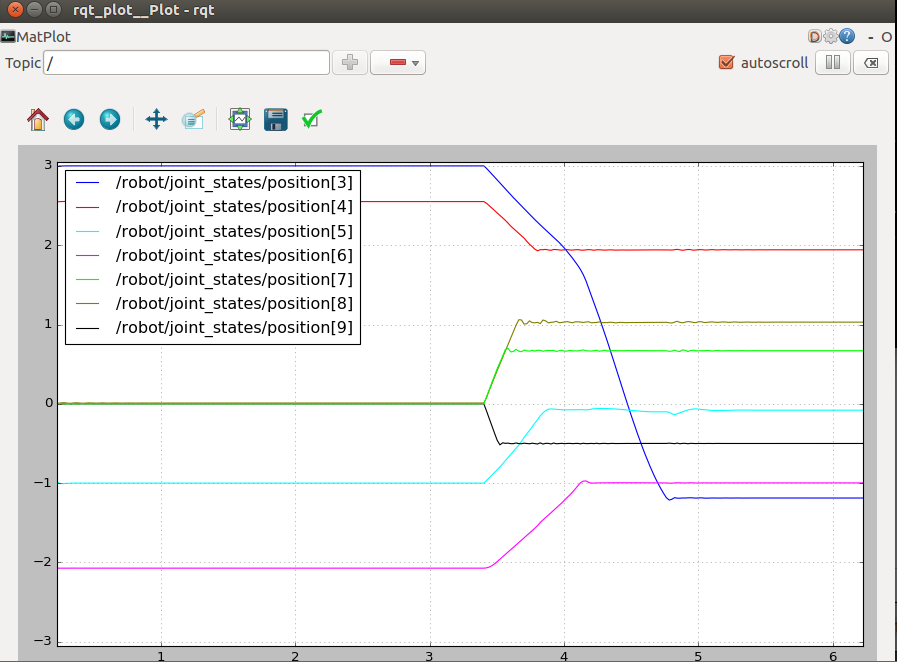
当然,也可以在topic栏增删要显示的数据
-
其它
数据可视化只能帮我们快速判断数据变化趋势,要进行具体分析,还是得通过代码的方式将数据保存下来做分析。