目录
一.最小生成树
1.1概念
1.2Kruskal算法
1.3Prim算法
二.最短路径
2.11单源最短路径--Dijkstra算法
2.1.2单源最短路径--Bellman-Ford算法
一.最小生成树
1.1概念
连通图中的每一棵生成树,都是原图的一个极大无环子图,即:从其中删去任何一条边,生成树 就不在连通;反之,在其中引入任何一条新边,都会形成一条回路。
若连通图由n个顶点组成,则其生成树必含n个顶点和n-1条边。
1. 只能使用图中的边来构造最小生成树
2. 只能使用恰好n-1条边来连接图中的n个顶点
3. 选用的n-1条边不能构成回路
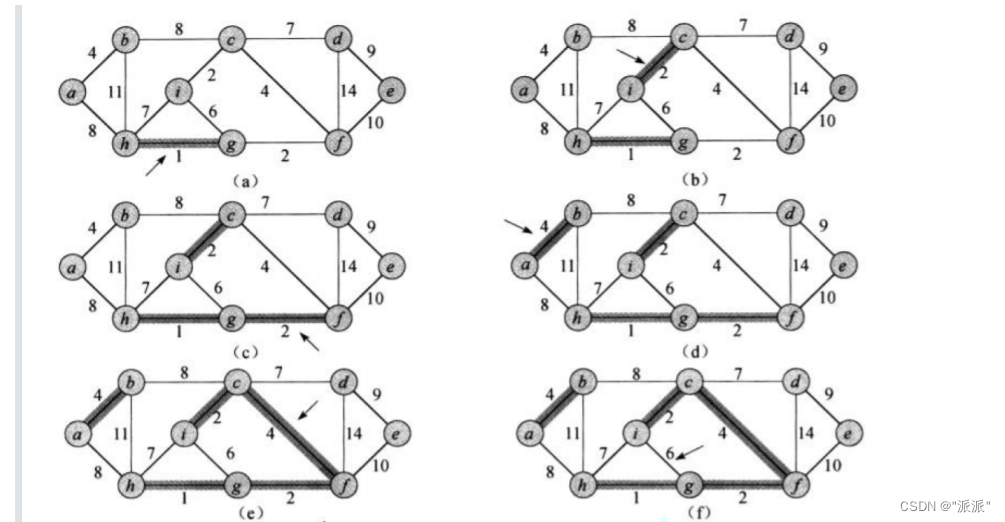
1.2Kruskal算法
思路:先构造n个顶点的,不含边的图(G={V,NULL}),后面不断从边的集合中选出权值最小的那一条边,并且加入该边后不会形成回路。
核心:每次迭代时,选出一条具有最小权值,且两端点不在同一连通分量上的边,加入生成树
例如:
步骤:
1.先构造n个顶点,无边的图。
2.将原来图的边存储好,放入一个可排序的容器中,例如priority_queue,将边按权值的大小排好序。
3.后面选出权值最小的边时,将其加入图中,此时要知道该边的两个顶点与权值。所以priority_queue存储的是边的权值以及该边两边的顶点信息,可用一个结构体来表示。
4.每次选出权值最小的边时,将其加入图中时,要判断加入的边是否会形成回路,可用并查集来判断。
5.选出n-1条边,且未形成回路,即是最小生成树
代码实现:
struct Edge //优先级队列存储的元素
{
int _dsti; //起始点下标
int _srci;// 目标点的下标
W _w; // 权值
Edge(int srci,int dsti, const W w)
:_dsti(dsti)
, _srci(srci)
, _w(w)
{}
bool operator>(const Edge& e) const //从小到大排列
{
return _w > e._w;
}
};
typedef Grap<V, W, W_MAX, Direc> Self;
W Kruskal(Self minTree)
{
int n = _vertexs.size();
for (size_t i = 0; i < n; ++i)
{
minTree._matrix[i].resize(n, W_MAX);
}
priority_queue<Edge, vector<Edge>, greater<Edge>> _q; //先将边存储到的队列排好序
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
if (_matrix[i][j] != 0)
_q.push(Edge(i, j, _matrix[i][j]));
}
}
cout << "开始选边" << endl;
UnionFindSet u(n); //并查集
int k = 0;
W sum=W();
while (!_q.empty())
{
Edge e = _q.top();
_q.pop();
if (!u.InSet(e._dsti, e._srci)) //若位形成回路
{
cout << "选出" << _vertexs[e._dsti]<<" " <<_vertexs[e._srci]<<" "<< e._w << endl;
u.Union(e._dsti, e._srci);
sum += e._w;
minTree.AddEdge(_vertexs[e._dsti], _vertexs[e._srci], e._w);
k++;
}
}
if (k = n - 1)
{
return sum;
}
else
{
cout << "存在回路" << endl;
}
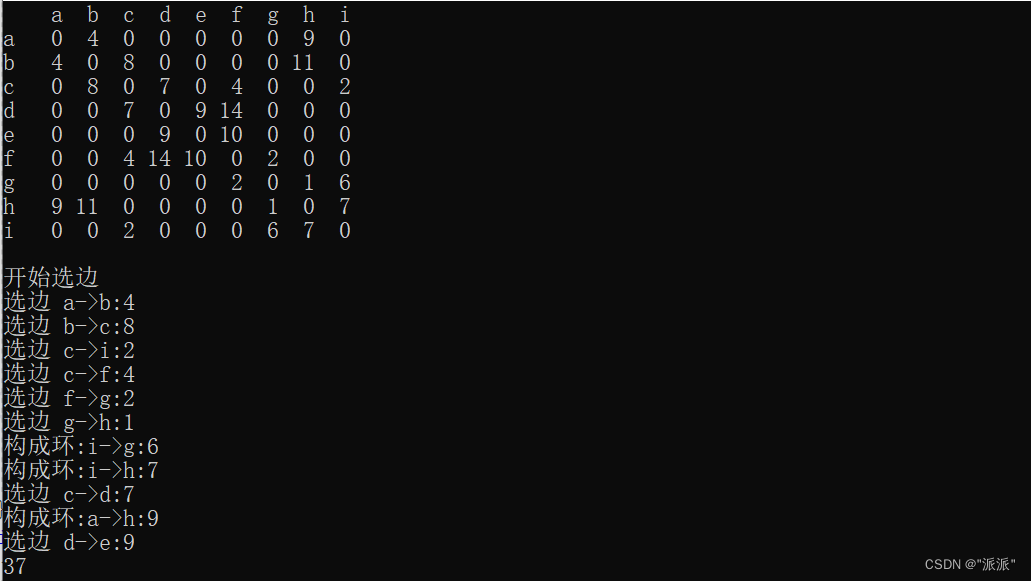
}结果:创建的是上面的图
void test1()
{
const char* str = "abcdefghi";
Grap<char, int> g(str, strlen(str));
g.AddEdge('a', 'b', 4);
g.AddEdge('a', 'h', 8);
g.AddEdge('a', 'h', 9);
g.AddEdge('b', 'c', 8);
g.AddEdge('b', 'h', 11);
g.AddEdge('c', 'i', 2);
g.AddEdge('c', 'f', 4);
g.AddEdge('c', 'd', 7);
g.AddEdge('d', 'f', 14);
g.AddEdge('d', 'e', 9);
g.AddEdge('e', 'f', 10);
g.AddEdge('f', 'g', 2);
g.AddEdge('g', 'h', 1);
g.AddEdge('g', 'i', 6);
g.AddEdge('h', 'i', 7);
g.Print();
cout << g.Kruskal(g) << endl;
}
1.3Prim算法
思路:从任意一个顶点开始,选出与其相连且权值最小的边,后面已经遍历过的顶点进行同样的操作,直到选完n-1条边。(选过的边不在遍历,该算法是贪心思想)
例如:假如从顶点A开始选边

步骤
1.先构造n个顶点,无边的图。
2.从给出的顶点(a)开始,将其与其相连的边放入优先级队列中排序,选出权值最小的边。同时记录该边对应的另一个顶点(b)。(此时顶点a已访问过,在添加边时,后面选出的边中对应的另一个顶点不能是a,在将对应顶点相连的边加入队列时,选出的边中顶点也必须是未访问过的,才能不形成回路)
3.对顶点b进行上面步骤2操作
3.选出n-1条边,且未形成回路,即是最小生成树。
代码:
W Prim(Self minTree, const W& src)
{
size_t srci = get_index(src);
size_t n = _vertexs.size();
minTree._matrix.resize(n);
for (size_t i = 0; i < n; ++i)
{
minTree._matrix[i].resize(n, 0);
}
vector<bool> X(n, true);
vector<bool> Y(n, true);
X[srci] = false; //从X集合中选出到集合Y的最短边
Y[srci] = false;
priority_queue<Edge, vector<Edge>, greater<Edge>> minq;
for (size_t i = 0; i < n; ++i)// 先把起始点连接的边添加到队列中
{
if (_matrix[srci][i] != 0)
{
minq.push(Edge(srci, i, _matrix[srci][i]));
}
}
cout << "开始选边" << endl;
size_t size = 0;
W totalW = W();
while (!minq.empty())
{
Edge min = minq.top();
minq.pop();
// 最小边的目标点也在X集合,则构成环,不要添加
if (!X[min._dsti])
{
cout << "构成环:";
cout << _vertexs[min._srci] << "->" << _vertexs[min._dsti] << ":" << min._w << endl;
}
else
{
minTree._AddEdge(min._srci, min._dsti, min._w);
cout << "选边" << " " << _vertexs[min._srci] << "->" << _vertexs[min._dsti] << ":" << min._w << endl;
X[min._dsti] = false;
Y[min._dsti] = false;
++size;
totalW += min._w;
if (size == n - 1)
break;
for (size_t i = 0; i < n; ++i)
{
if (_matrix[min._dsti][i] != 0 && Y[i])// 顶点i是未访问过的
{
minq.push(Edge(min._dsti, i, _matrix[min._dsti][i]));
}
}
}
}
if (size == n - 1)
{
return totalW;
}
else
{
return W();
}
}结果:
二.最短路径
2.11单源最短路径--Dijkstra算法
介绍:Dijkstra算法就适用于解决带权重的有向图上的单源最短 路径问题,同时算法要求图中所有边的权重非负。一般在求解最短路径的时候都是已知一个起点 和一个终点,所以使用Dijkstra算法求解过后也就得到了所需起点到终点的最短路径。
思路:
针对一个带权有向图 G ,将所有结点分为两组 S 和 Q , S 是已经确定最短路径的结点集合,在初始时为空(初始时就可以将源节点s 放入,毕竟源节点到自己的代价是 0 ), Q 为其余未确定最短路径的结点集合,每次从 Q 中找出一个起点到该结点代价最小的结点 u ,将 u 从 Q 中移出,并放入 S 中,对 u 的每一个相邻结点 v 进行松弛操作 。松弛即对每一个相邻结点 v ,判断源节点 s 到结点 u的代价与u 到 v 的代价之和是否比原来 s 到 v 的代价更小,若代价比原来小则要将 s 到 v 的代价更新为s 到 u 与 u 到 v 的代价之和,否则维持原样。
上面的两个数组中,一个来表示s->到目标点的最小权值,另一个来表示路径。简单来看,也就是贪心的思路,由s点出发,首先是s->y=5,所以s->y的最短路劲已确定。后面比较权值大小,从y开始找边,可确定s->z的最短路径为7。后面再比较权值大小,从t开始找边,确定s->x最短路径为8.后面以此类推。
代码:
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
size_t srci = get_index(src);
size_t n = _vertexs.size();
dist.resize(n, MAX_W);
pPath.resize(n, -1);
dist[srci] = 0;
pPath[srci] = srci;
// 已经确定最短路径的顶点集合
vector<bool> S(n, true);
for (size_t j = 0; j < n; ++j)
{
int u = 0;
W min = W_MAX;
for (size_t i = 0; i < n; ++i) //选出s->目标点最小权值的那个,从它开始找边
{
if (S[i] == true && dist[i] < min)
{
u = i;
min = dist[i];
}
}
S[u] = false; //已确定s->u的最短路径
for (size_t v = 0; v < n; ++v)// 松弛更新u连接顶点v srci->u + u->v < srci->v 更新
{
if (S[v] == true && _matrix[u][v] != W_MAX
&& dist[u] + _matrix[u][v] < dist[v])
{
dist[v] = dist[u] + _matrix[u][v];
pPath[v] = u;
}
}
}
}
打印路径: pPath数组中的下标表示表示对应的顶点,存储的值表示上一个联通它的顶点下标。
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath)
{
size_t srci = get_index(src);
size_t n = _vertexs.size();
for (size_t i = 0; i < n; ++i)
{
if (i != srci)
{
// 找出i顶点的路径
vector<int> path;
size_t parenti = i;
while (parenti != srci)
{
path.push_back(parenti);
parenti = pPath[parenti];
}
path.push_back(srci);
reverse(path.begin(), path.end());//需要逆置下
for (auto index : path)
{
cout << _vertexs[index] << "->";
}
cout << dist[i] << endl;
}
}
}结果:

补充:该算法不能用于权值为负数的情况,当从一个顶点(A)到另一个顶点(B) 确定最短路径时,若有其它边是负数,则A->B的路径不一定是最短路径。
2.1.2单源最短路径--Bellman-Ford算法
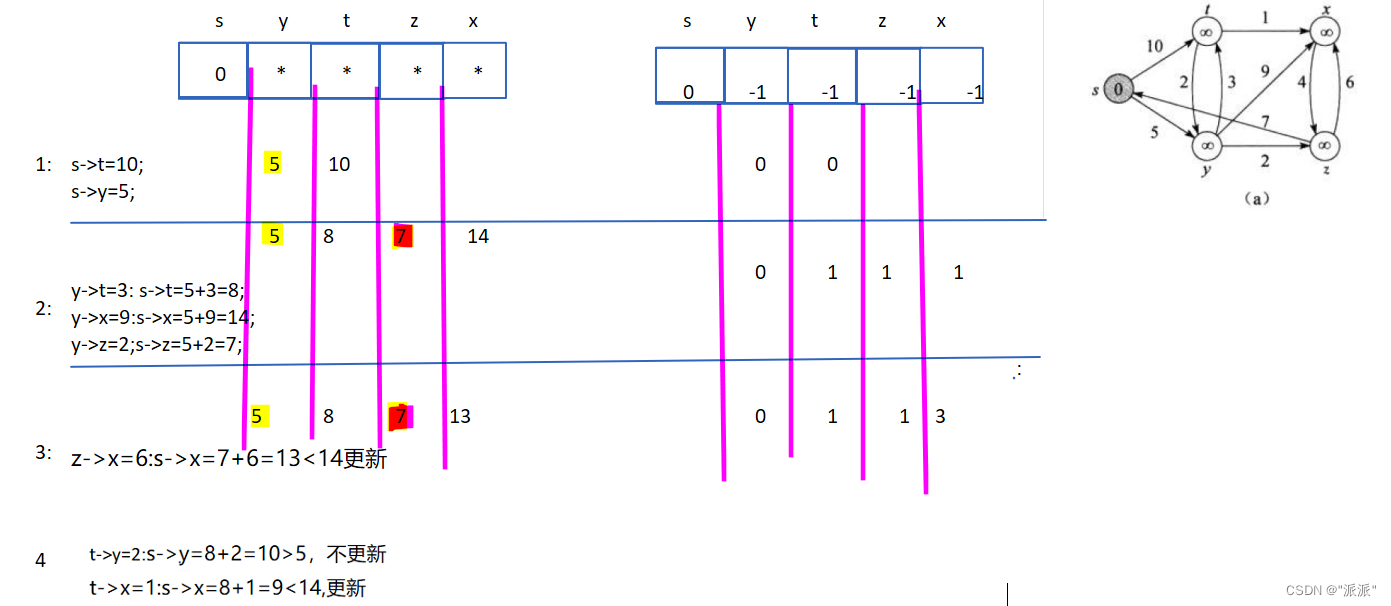
bellman—ford算法可以解决负权图的单源最短路径问题,思路是暴力去遍历所有的边,由于存在负权的边,所以遍历完一次所有的边后,还要再去遍历n-1次,去更新负权边的影响。
例如:

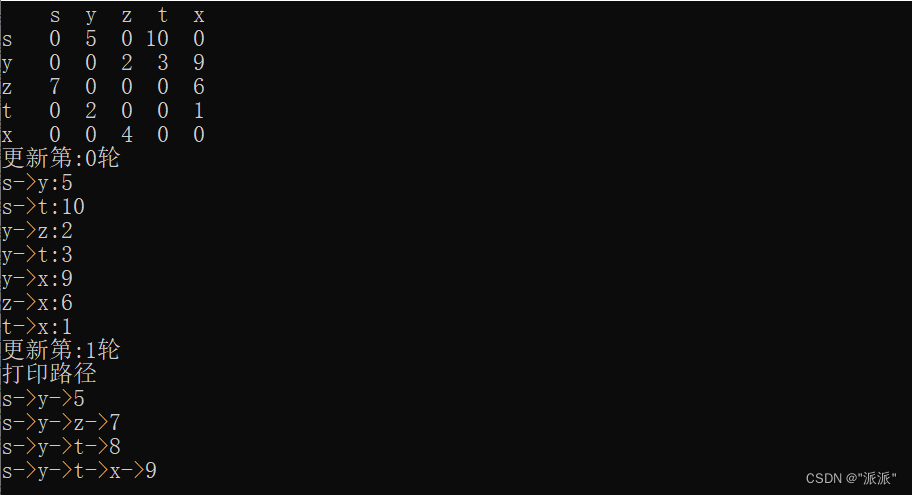
当从s去遍历时,并不能确定s->t=6是最短路径,s->y->x->t比从s->t的权值还要小,原因就是存在带负权的边。当遍历完与s相连的边后,暂且确定了s->t,s->y的最短路径。再去遍历与t,y相连的边,确定t->x,t->y,t->z的最短路径,进而确定s->x,s->y,s->z的路径......。当遍历到有负权的边时,与该边相连点(假设为m)s->m的最短路劲可能变化。有n个顶点,所以要遍历n次。
代码:
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{
size_t n = _vertexs.size();
size_t srci = get_index(src);
dist.resize(n, W_MAX);
pPath.resize(n, -1);
dist[srci] =0;
for (size_t k = 0; k < n; ++k)// 总体最多更新n轮
{
// i->j 更新松弛
bool update = false;
cout << "更新第:" << k << "轮" << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
//dist[i]表示的是 srci -> i 的权值
if (_matrix[i][j] != 0 && dist[i] + _matrix[i][j] < dist[j])
{
update = true;
dist[j] = dist[i] + _matrix[i][j];
pPath[j] = i;
}
}
}
// 如果这个轮次中没有更新出更短路径,那么后续轮次就不需要再走了
if (update == false)
{
break;
}
}
return true;
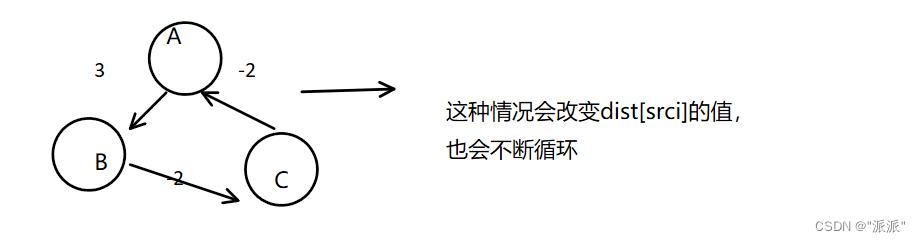
}如果存在带负权的回路呢?例如:
只需判断一下即可
if (j != srci)
{
if (_matrix[i][j] != 0 && dist[i] + _matrix[i][j] < dist[j])
{
update = true;
cout << _vertexs[i] << "->" << _vertexs[j] << ":" << _matrix[i][j] << endl;
dist[j] = dist[i] + _matrix[i][j];
pPath[j] = i;
}
}但下面这种情况:
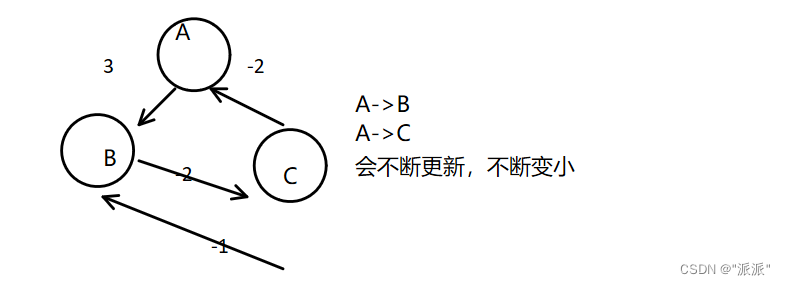
在遍历n次后进行判断,若还能更新,即存在负权回路;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// srci -> i + i ->j
if(j!=srci)
{
if (_matrix[i][j] != 0 && dist[i] + _matrix[i][j] < dist[j])
{
cout << "带负权回路" << endl;
return false;
}
}
}
}
return true;
}代码测试:
void test2()
{
const char* str = "syztx";
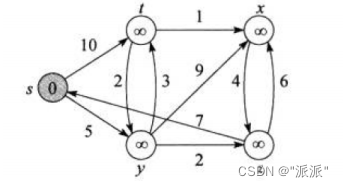
Grap<char, int,INT_MAX, true> g(str, strlen(str));
g.AddEdge('s', 't', 10);
g.AddEdge('s', 'y', 5);
g.AddEdge('y', 't', 3);
g.AddEdge('y', 'x', 9);
g.AddEdge('y', 'z', 2);
g.AddEdge('z', 's', 7);
g.AddEdge('z', 'x', 6);
g.AddEdge('t', 'y', 2);
g.AddEdge('t', 'x', 1);
g.AddEdge('x', 'z', 4);
g.Print();
vector<int> dist;
vector<int> parentPath;
g.BellmanFord('s', dist, parentPath);
cout << "打印路径" << endl;
g.PrintShortPath('s', dist, parentPath);
}结果: