文章目录
- 前言
- CubeMX配置
- SPI驱动实现
- spi_driver.h
- spi_driver.c
- 额外的接口补充
前言
SPI,想了很久没想明白其DMA或者IT比较好用的方法,可能之后也会写一个
我个人使用场景大数据流不多,如果是大批量数据交互自然是DMA更好用,但考虑到多从机通讯,感觉还是阻塞式更灵活一些,毕竟大部分通讯片选延时1us,但一个数据传进去也就不到1us。
以后有时间改个DMA或者IT升级版
spix = new_SPI_Driver(SPIx_Port, CS_GPIOx, CS_Pin);//完成初始化
RxData = spix->tr16(spix, TxData);//数据传递
spix->cs_l(spix);;//CS拉低
spix->cs_h(spix);;//CS拉搞
SPI的多从机任务可以自己挂CS,并在上层实现数据流读取
上层实现可以参考工程文件参考——ADS1118多从机驱动(base on spi_driver)
需要8位传输的可以自己改
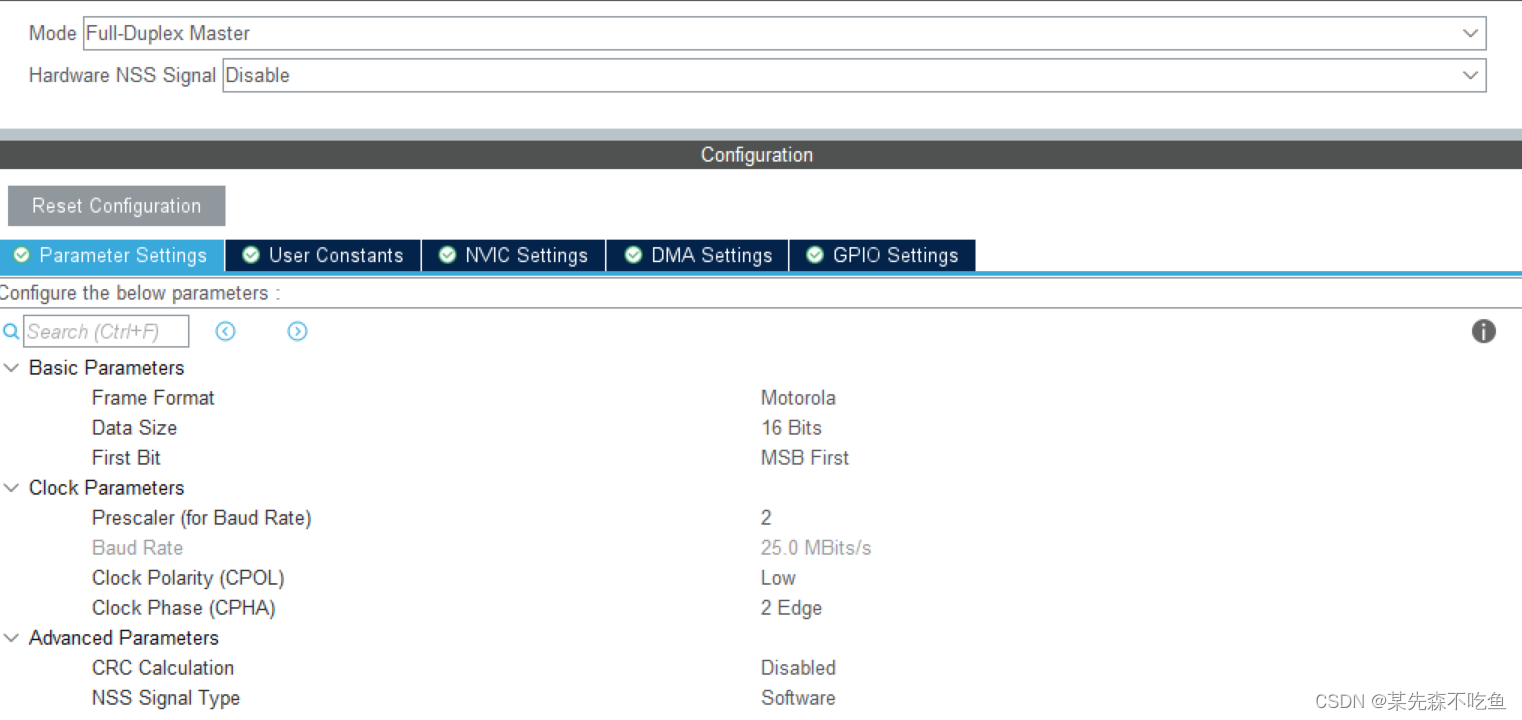
CubeMX配置
开了就能用,注意匹配下,数据长度,8bit还是16bit。MSB是先高位还是先低位,以及CPOL与CPHA的设置。NSS硬件片选没什么用,包括从机的NSS,感觉不如外部触发中断。
CS直接开GPIO,根据自己从机数量需求设计

SPI驱动实现
spi_driver.h
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __SPI_DRIVER_H
#define __SPI_DRIVER_H
/* =================================================================================
File name: __SPI_DRIVER_H
Author: Mr.NoFish
===================================================================================*/
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
typedef struct SPI_Driver_ SPI_Driver;
typedef void (*SPIfptrCS_H)(SPI_Driver*);
typedef void (*SPIfptrCS_L)(SPI_Driver*);
typedef uint16_t (*SPIfptrTranRecv16)(SPI_Driver*, uint16_t);
typedef void (*SPIfptrTran16)(SPI_Driver*, uint16_t);
struct SPI_Driver_
{
SPI_TypeDef* SPIx;
GPIO_TypeDef* CS_GPIOx;
uint32_t CS_Pin;
uint16_t TxData;
uint16_t RxData;
SPIfptrCS_H cs_h;
SPIfptrCS_L cs_l;
SPIfptrTranRecv16 tr16;
SPIfptrTran16 tran16;
};
SPI_Driver* new_SPI_Driver(SPI_TypeDef* SPIx_Port, GPIO_TypeDef* CS_GPIOx, uint32_t CS_Pin);
void spi_chip_select_set(SPI_Driver* const pSPIObj);
void spi_chip_select_reset(SPI_Driver* const pSPIObj);
void spi_transmit_16(SPI_Driver* const pSPIObj, uint16_t TxData);
uint16_t spi_transmit_receive_16(SPI_Driver* const pSPIObj, uint16_t TxData);
#endif
spi_driver.c
/* =================================================================================
File name: __SPI_DRIVER_C
Author: Mr.NoFish
===================================================================================*/
#include "spi_driver.h"
SPI_Driver* new_SPI_Driver(SPI_TypeDef* SPIx_Port, GPIO_TypeDef* CS_GPIOx, uint32_t CS_Pin)
{
SPI_Driver* pObj = NULL;
uint8_t i = 0;
pObj = (SPI_Driver*)malloc(sizeof(SPI_Driver));
if (pObj == NULL)
{
printf("WARN: SPI_Driver initialization failed.\r\n");
return NULL;
}
pObj->SPIx = SPIx_Port;
pObj->CS_GPIOx = CS_GPIOx;
pObj->CS_Pin = CS_Pin;
pObj->cs_h = spi_chip_select_set;
pObj->cs_l = spi_chip_select_reset;
pObj->tran16 = spi_transmit_16;
pObj->tr16 = spi_transmit_receive_16;
pObj->cs_h(pObj);
//LL_SPI_Enable(pObj->SPIx);
printf("INFO: SPI_Driver initialization succeeded.\r\n");
return pObj;
}
void spi_chip_select_set(SPI_Driver* const pSPIObj)
{
LL_GPIO_SetOutputPin(pSPIObj->CS_GPIOx, pSPIObj->CS_Pin);
}
void spi_chip_select_reset(SPI_Driver* const pSPIObj)
{
LL_GPIO_ResetOutputPin(pSPIObj->CS_GPIOx, pSPIObj->CS_Pin);
}
void spi_transmit_16(SPI_Driver* const pSPIObj, uint16_t TxData)
{
pSPIObj->TxData = TxData;
while(!LL_SPI_IsActiveFlag_TXE(pSPIObj->SPIx));
LL_SPI_TransmitData16(pSPIObj->SPIx, pSPIObj->TxData);
}
uint16_t spi_transmit_receive_16(SPI_Driver* const pSPIObj, uint16_t TxData)
{
pSPIObj->TxData = TxData;
while(!LL_SPI_IsActiveFlag_TXE(pSPIObj->SPIx));
LL_SPI_TransmitData16(pSPIObj->SPIx, pSPIObj->TxData);
while(LL_SPI_IsActiveFlag_BSY(pSPIObj->SPIx));
while(!LL_SPI_IsActiveFlag_RXNE(pSPIObj->SPIx));
pSPIObj->RxData = LL_SPI_ReceiveData16(pSPIObj->SPIx);
return pSPIObj->RxData;
}
额外的接口补充
LL_SPI_Enable(SPIx);别忘记自己加一下,但留意别在初始化之前Enable。
SPI每个设备的实现方式都不同,所以需要根据数据手册进一步实现上层设计。
这个库设计用来提供给多从机控制,一些范例的应用可以参考如下文章。
工程文件参考——ADS1118多从机驱动(base on spi_driver)
















![# [0705] Task06 DDPG 算法、PPO 算法、SAC 算法【理论 only】](https://i-blog.csdnimg.cn/direct/2c60a621145c4713b5117f7585071db1.png)