💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
📋1 概述
📝2 运行结果
📃3 参考文献
📋4 Matlab代码实现
📋1 概述
本文利用遗传算法解决了卡车无人机串联或包裹递送操作(即UPS,FedEx)的旅行推销员问题的“最后一英里”问题。每辆卡车都携带一架无人机,该无人机从一个站点发射,将范围内的包裹运送到附近的站点,同时与卡车并行运行。卡车和无人机并行工作以运送包裹。无人机受到航程和容量的限制。因此,它必须作为操作在卡车附近运行。操作是指卡车发射无人机,卡车和无人机运送到不同的位置,然后卡车在会合地点回收无人机以进行电池更换和装载。这个想法是确定卡车和无人机(以及操作)的路线,以最大限度地减少总时间。总时间基于操作(启动-交付-恢复)的时间。操作(卡车或无人机)的最大时间用于计算路径的总时间。
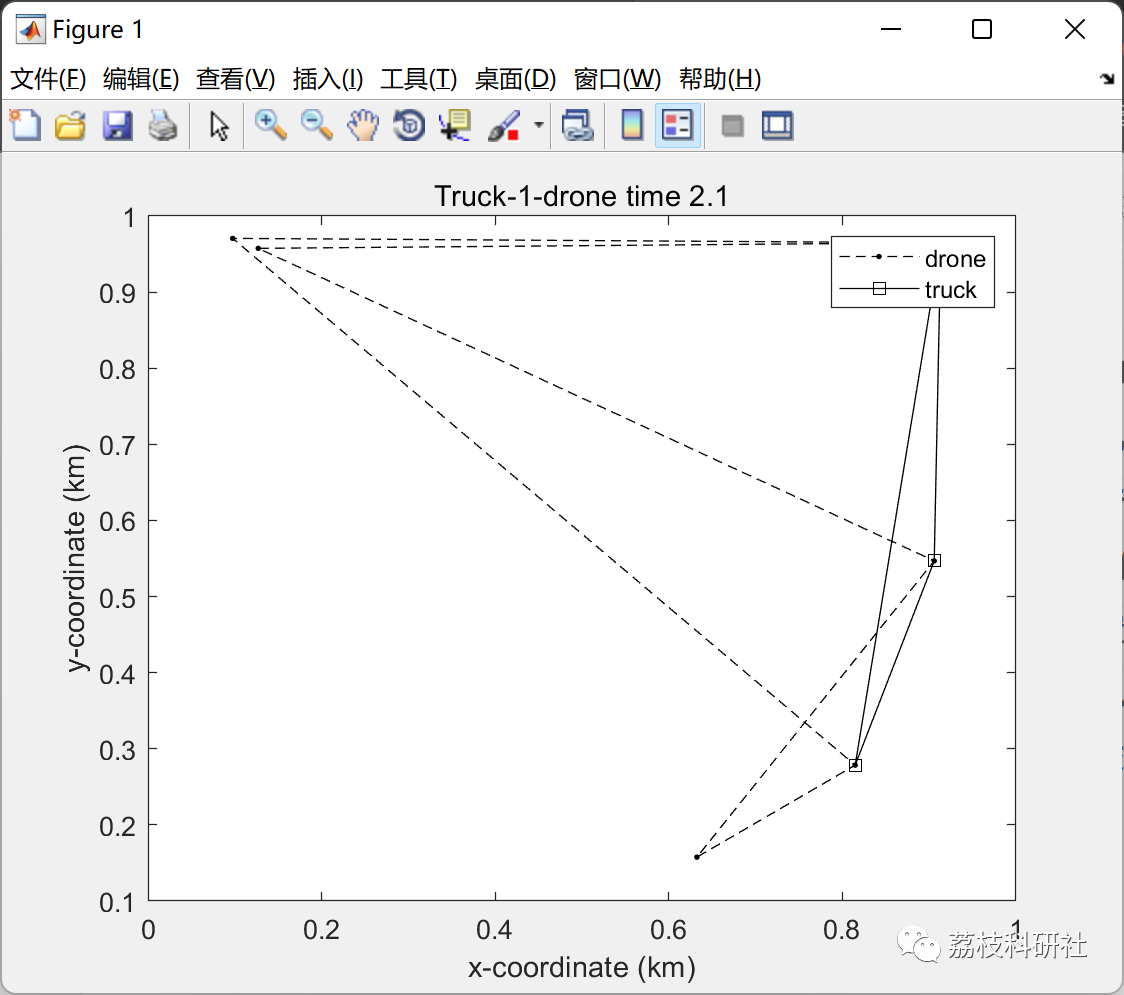
📝2 运行结果
部分代码:
% Find the Best Route in the Population
[minDist,index] = min(totalDist);
distHistory(iter) = minDist;
if minDist < globalMin
globalMin = minDist;
optPop2 = pop2(index,:);
optPop1 = pop(index,:);
if showprogress % gaph results
tr_route = (optPop2==0).*optPop1;
tr_route = tr_route(tr_route>0);
tr_route = [tr_route tr_route(1)];
if optPop2(n)==1
dr_route = [optPop1 optPop1(1) ];
else
dr_route = [optPop1 ];
end
plot(xy(dr_route,1), xy(dr_route,2), 'k.--'); hold on;
plot(xy(tr_route,1), xy(tr_route,2),'ks-');
xlabel('x-coordinate (km)');
ylabel('y-coordinate (km)');
legend('drone','truck');
title(sprintf('Truck-1-drone time %1.1f',minDist));
hold off;
drawnow;
end
end
% Genetic Algorithm Operators
randomOrder = randperm(popSize);
for p = 5:5:popSize
% basically a random sampling in matrix format with a
rtes = pop(randomOrder(p-4:p),:);
dists = totalDist(randomOrder(p-4:p));
% what are the min distances?
[~,idx] = min(dists);
% what is the best route
bestOf5Route = rtes(idx,:);
% randomly select two route insertion points and sort
routeInsertionPoints = sort(ceil(n*rand(1,2)));
I = routeInsertionPoints(1);
J = routeInsertionPoints(2);
for k = 1:5 % Mutate the Best row (dist) to get Three New Routes and orig.
% a small matrix of 4 rows of best time
tmpPop(k,:) = bestOf5Route;
switch k
% flip two of the cities and cities between
case 2 % Flip
tmpPop(k,I:J) = tmpPop(k,J:-1:I);
case 3 % Swap
tmpPop(k,[I J]) = tmpPop(k,[J I]);
case 4 % Slide segment
tmpPop(k,I:J) = tmpPop(k,[I+1:J I]);
% tmpPop2(k,I2)=flag;
case 5 % increment sequence one space
tmpPop(k,1:end) = tmpPop(k,[2:end 1]);
otherwise % Do Nothing
end
end
% using the original population, create a new population
newPop(p-4:p,:) = tmpPop;
end
pop = newPop; % update entire populations with mutations
end
res=[optPop2;
optPop1]
end
📃3 参考文献
[1]黄书召,田军委,乔路,王沁,苏宇.基于改进遗传算法的无人机路径规划[J].计算机应用,2021,41(02):390-397.