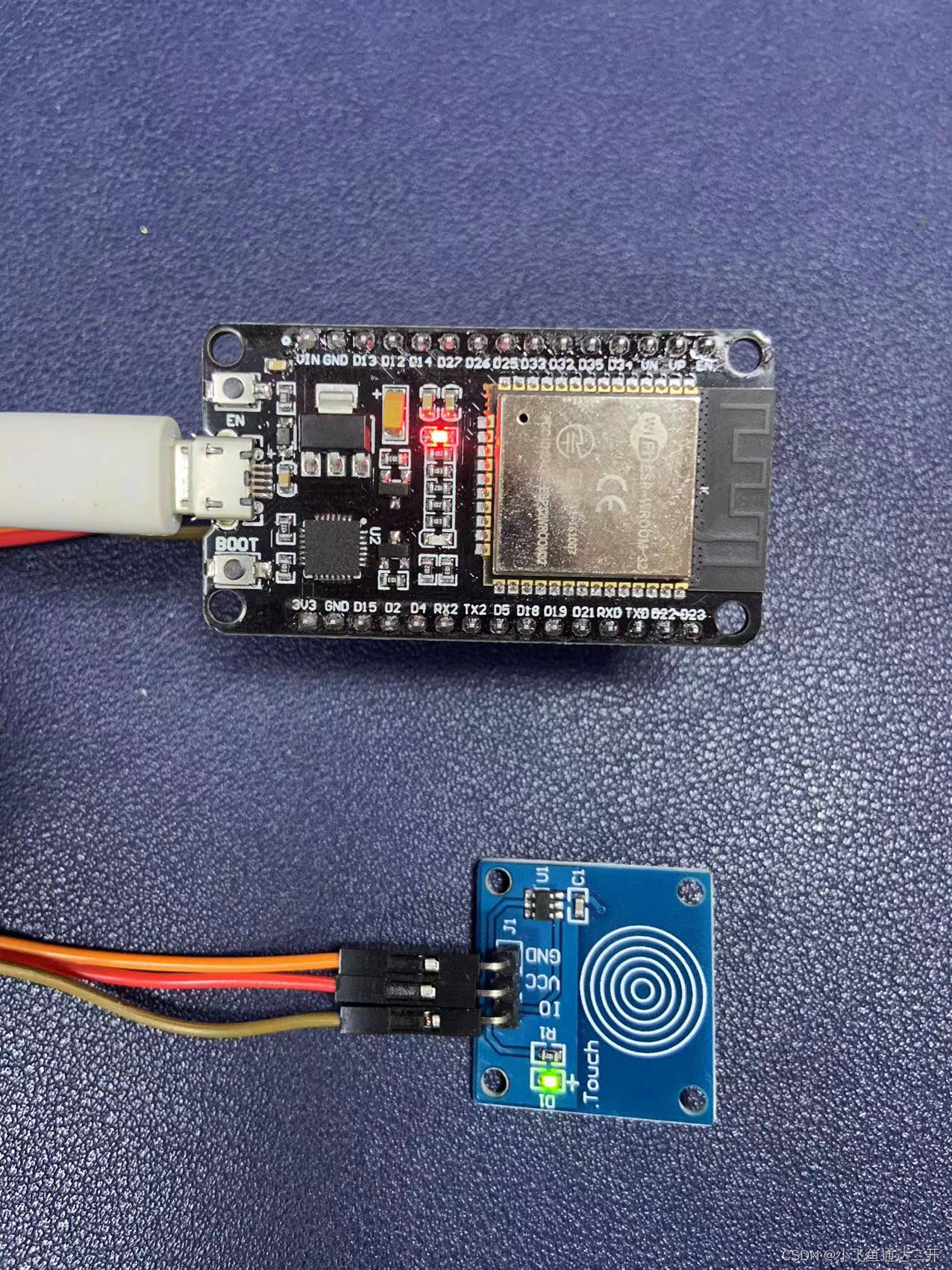
今天XIAOFEIYU继续来实验ESP32使用传感器模块,这次用到的模块为TOUCH触摸模块。
三个针脚分别为正负极,IO针脚。
#define pin 25
void setup(){
Serial.begin(9600);
pinMode(pin, INPUT);
}
float value = 0.0;
void loop(){
value = digitalRead(pin);
Serial.println(value);
delay(500);
}
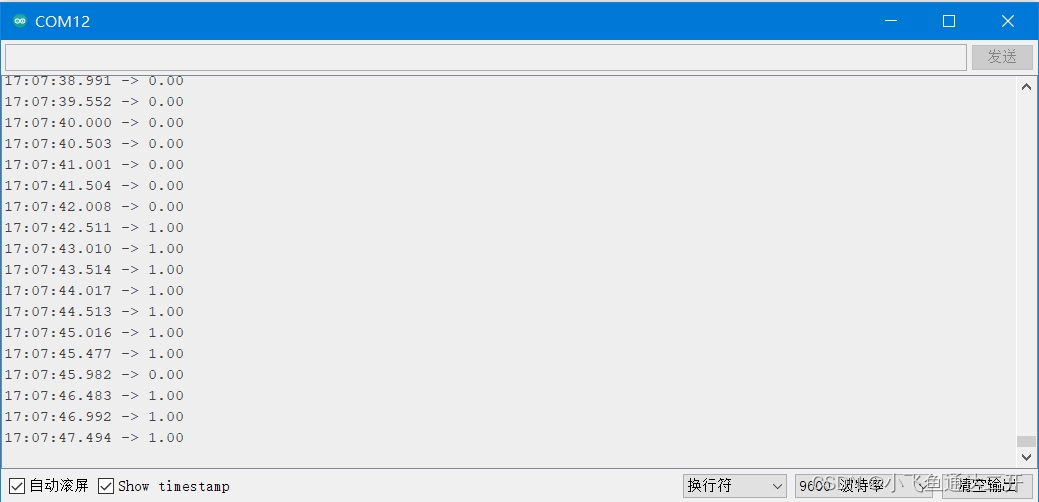
从串口监视器中可以看到,当未触摸线圈时输出值为0,当收接触时输出值变为1。

![[ROS 系列学习教程] 建模与仿真 - 使用 ros_control 控制差速轮式机器人](https://img-blog.csdnimg.cn/direct/5878cc3a6b6d4a58930e1f15be32b924.gif#pic_center)