串口通信
- 前言
- 一、串行通信和并行通信
- 二、波特率
- 三、USRAT
- 如何实现USART
- 四、通信的时候共地
- 五、奇偶校验位
- 总结
前言
大三上时候的笔记⇨32入门-串口通信-发送和接收数据🌟更加偏向32部分的吧。
大三上左右的时候写过串口通信的笔记,那时候虽然青涩啥也不懂,但是笔记还是正确的。现在大三了,觉得自己学习不够深入,继续补充点细节,于是继续开了这篇。----2024/6/18
理论知识来源⇩
花几分钟理解嵌入式通信基础
3分钟理解通信协议之串口UART到底是个啥?
一、串行通信和并行通信
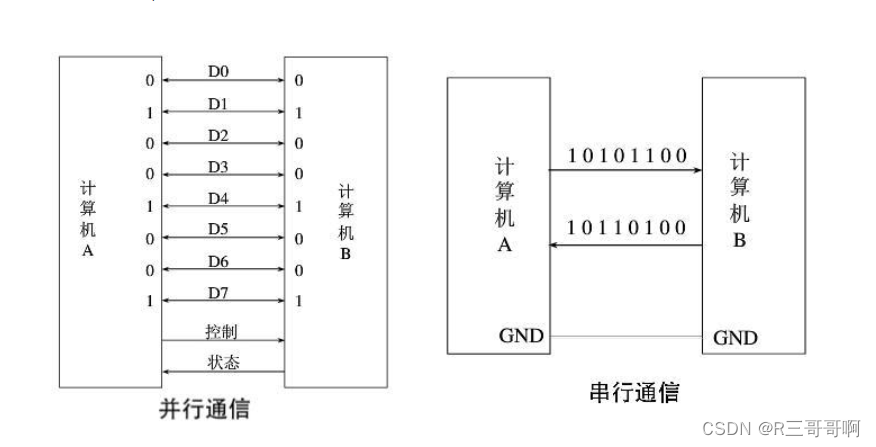
两个设备想要进行传播数据,有两个办法:
1、串行通讯
2、并行通信
通信方式的分类(串行通信和并行通信)
简单了解二者的区别
就是这张图片,详细点的还是建议去细读上面这篇博文。
请务必掌握:
{ 通信的分类图 }
什么是单双工?什么是半双工?什么是全双工?
什么是同步通信?什么是异步通信?
串行、并行的优缺点分别是什么?
常见的串行通信:
sbus、PPM、JTAG、USART、IIC、CAN、SPI、MIDI、USB、RS232、Morse Code等等。
二、波特率
发送的时候必须要有时间间隔,即波特率决定。
9600->1s内发送9600位这样的数据。
1/9600=104us
意味着没104us发送一次高低电平。
如果想发送更快就要选择更高的波特率。
三、USRAT
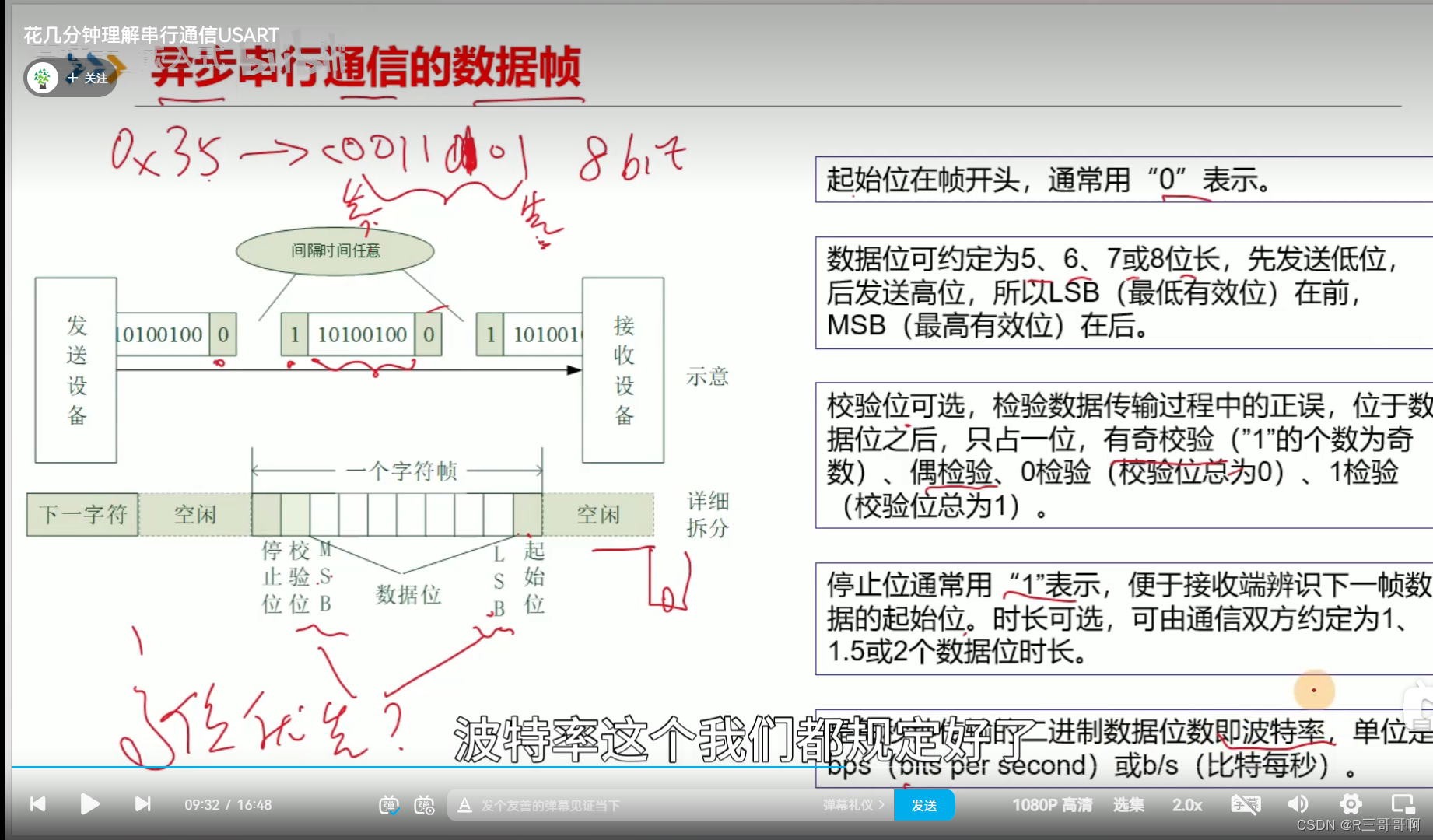
数据帧
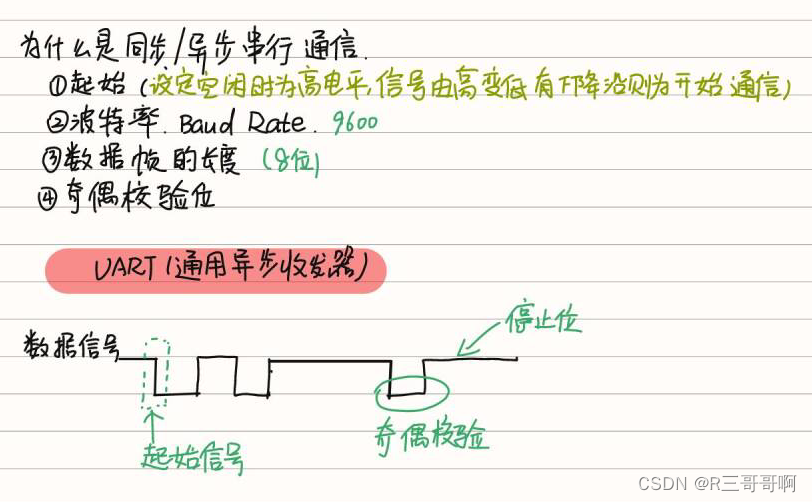
如何实现USART
四、通信的时候共地
来确保通信中的电位参考一致(参考电压一致)。
这对于保证信号传输的稳定性和可靠性非常重要,因为通信中使用的信号必须基于相同的电位参考进行传输和接收,否则可能导致信号失真或通信失败。
ch340本质上就是将不同设备的电平信号进行转换了。
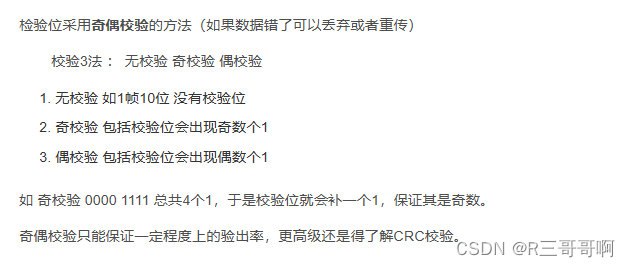
五、奇偶校验位
这个得看老的那片博文。
总结
这篇文章依旧没有总结