这个附录选自O ' Reilly Media出版的Alen B . Downey的Think Complexity ( 2012 ) 一书 .
当你读完本书之后 , 可能会像继续读读那本书 .
'算法分析' 是计算机科学的一个分支 , 研究算法的性能 , 尤其是他们的运行时间和空间需求 .
参见http : / / en . wikipedia . org / wiki / Analysis_of_algorithms .
算法分析的实践目标是预测不同算法的性能 , 以便于指导设计决策 .
在 2008 年的美国总统大选中 , 候选人巴拉克欧巴马在访问Google公司被要求做一个即兴分析 .
Google的首席执行官埃里克•施密特问他 : '给100万个32位整数排序的最高效率算法是什么' .
奥巴马显然被提示了 , 因为它马上回答 : '我觉得冒泡排序可能是错误的做法' .
参见http : / / bit . ly / 1 MplwTf .
这是真的 : 冒泡排序在概念上简单 , 但对于大数据的排序很慢 .
施密特想得到的答案可能是 '基数排序' ( http : / / en . wifipedia . org / wifiRadix_sort ) .
但如果你在面试时被问到这个问题 , 我觉得更好的答案是 :
' 给 100 万个数排序的最快算法应当是使用我用的语言提供的排序函数 .
它的性能应当对绝大数应用都足够好了 , 但如果发现我的程序太慢 ,
我会使用一个性能分析器去查看时间花在哪里 .
如果看起来更快的排序算法带来明显的提升 , 那我会去寻找一个基数排序的良好实现 . '
算法分析的目是在不同算法间做出有意义的比较 , 但也有一些问题 .
* 算法的相对性可能依赖于硬件的特征 , 所以一个算法可能在机器A上更快 , 另一个在机器B上更快 .
这个问题的通用解决方法是先指定一个 '机器模型' ,
并分析在一个指定的机器模型中一个算法需要执行的步骤或操作 .
* 相对性能还可能依赖于数据集的细节特征 .
例如 , 有的排序算法在数据已经是部分排序的情形下比其他算法更快 , 有的程序在这种情况下反而慢 .
避免这个问题的通常办法是分析 '最坏情况' 场景 .
有的时候分析平均情况的性能也有用 , 但也通常会更难 , 因为有哪些情形可以用来 '平均' 往往并不明显 .
* 相对性能也依赖于问题的规模 .
对小序列更快的排序算法可能对大序列就慢了 .
这个问题的通常解决方案是用一个问题规模的函数来表达运行时间 ( 或操作数 ) ,
并根据问题规模增法的速度将函数进行归类 .
这种比较的好处之一是自然而然地可以将算法进行简单地分类 .
例如 , 我知道算法A的运行时间趋向于和输入的规模n成比例 , 而算法B趋向于和n ^ 2 成比例 ,
那么我会预期至少对应大的n值 , 算法A比算法B块 .
这种分析也有需要注意的地方 , 后面会谈到 .
假设你需要分析两个算法 , 并依照输入的规模来表达它们的运行时间 :
算法A需要 100 n + 1 步来解决规模为n的问题 , 算法B需要n ^ 2 + n + 1 步 .
下面的表格显示了这两个算法在不同的问题规模下的运行时间 :
输入规模 算法A的运行时间 算法B的运行时间 10 1 001 111 100 10 001 10 101 1 000 100 001 1 001 001 10 000 1 000 001 >10**10
ps :
'首项' 是一个多项式中最高次方的项 .
在一个多项式中 , 每一项都由一个系数和一个指数幂次的变量组成 .
例如 , 在多项式 3 x ^ 2 + 2 x + 1 中 , 3 x ^ 2 , 2 x和 1 都是多项式的项 .
系数 : 是指代数式的单项式中的数字因数 , 比如说代数式 "3x" ,
它表示一个常数 3 与未知数x的乘积 , 我们把 3 叫做这个代数式的系数 , " 叫做常数项 .
"非首项" 指的是在一个多项式中 , 除了第一项之外的所有项 .
在上面的例子中 , 非首项是 2 x和 1.
非首项通常在多项式运算中非常重要 , 因为在对多项式进行加减乘除等操作时 ,
我们通常只需要考虑它们的非首项 , 这是因为多项式的首项通常对结果的影响最大 ,
并且在对多项式进行操作时往往可以简化计算 .
在n = 10 时 , 算法A看起来很差 ; 它几乎需要 10 倍于算法B的时间 .
但对于n = 100 来说它们就已经差不多了 , 而在更大的规模时 , 算法A远好于算法B .
这里根本的原因在于对很大的n值 , 任何包含n ^ 2 项的函数都会比首项是n的函数增长快速很多 .
对于算法A , 首项有一个很大的系数 100 , 因此算法B在小的n时比算法A快 .
但不论系数是多少 , 总有一个n值会导致an ^ 2 > bn .
对于非首项来说也如此 . 即使算法A的运行时间是n + 1000000 , 对于足够大的n , 任然会比算法B快 .
( 非首项 , 我数学不好看不懂了 , )
总的来说 , 我们预期有更小的首项的算法对大规模问题来说是更好的算法 .
但对于小一些的问题来说 , 可能存在一个 '交叉点' , 那里其他算法可能更好 .
交叉点的位置取决于算法的细节 , 输入已经硬件的条件 , 所有在想法分析时常常被忽略掉 .
但那并不意味着你可以忘记它 .
如果有两个算法有相同的首项 , 则很难说哪一个更好 ; 同样的 , 答案也取决于细节 .
所以对于算法分析来说 , 首项相同的函数被认为是同等的 , 即使他们的系数不同 .
'增长量级' 就是各种增长行为是同等的函数的集合 .
例如 , 2 n , 100 n和n + 1 都是一个增长量级 , 用 '大O标记法' 写作O ( n ) , 通常称为 '线性的' ,
因为这个集合中的每个函数都依据n线性增长 .
所有首项是n ^ 2 的函数都属于O ( n ^ 2 ) , 它们被称为是 '平方的' .
下面的表格显示了算法分析中大部分最常见的增长量级 , 按照更坏的程序递增 :
增长量级 名称 O(1) 常量级 O(logbn) 对数级(对任意b) O(n) 线性级 O(nlogbn) nlogn O(n^2) 平方级 O(n^3) 立方级 O(c^n) 指数级(底数c任意)
对应对数项 , 底数并没有影响 ; 修改底数相当于乘以一个常量 , 而那样并不影响增长量级 .
类似地 , 所有的指数函数都是同一个增长量级 , 不论指数级是什么 .
指数函数增长非常迅速 , 所以指数级算法只在小规模的问题中应用 .
在http : / / en . wikipedia . org / wiki / Big_O_notation上阅读大O标记法的维基百科页面 , 并回答下列问题 .
* 1. n ^ 3 + n ^ 2 的增长量级是多少 , 1000000 n ^ 3 + n ^ 2 呢? n ^ 3 + 1000000 n ^ 2 呢?
n ^ 3 + n ^ 2 的增长量级是 O ( n ^ 3 )
1000000 n ^ 3 + n ^ 2 的增长量级是 O ( n ^ 3 )
n ^ 3 + 1000000 n ^ 2 的增长量级是 O ( n ^ 3 )
对于第一个算法 , 随着输入规模 n 的增大 , n ^ 3 的增长速度比 n ^ 2 更快 ,
因此可以忽略 n ^ 2 对总体复杂度的影响 , 算法的时间复杂度为 O ( n ^ 3 ) .
对于第二个算法 , 1000000 n ^ 3 的增长速度比 n ^ 2 更快 ,
因此可以忽略 n ^ 2 对总体复杂度的影响 , 算法的时间复杂度为 O ( n ^ 3 ) .
对于第三个算法 , n ^ 3 的增长速度比 1000000 n ^ 2 更快 ,
因此可以忽略 1000000 n ^ 2 对总体复杂度的影响 , 算法的时间复杂度为 O ( n ^ 3 ) .
* 2. ( n ^ 2 + n ) • ( n + 1 ) 的增长量级是多少? 在相乘之前 , 请记住你只需要首项 .
在进行乘法运算之前 , 我们可以将 ( n ^ 2 + n ) 和 ( n + 1 ) 展开 , 得到 :
( n ^ 2 + n ) • ( n + 1 ) = n ^ 3 + n ^ 2 + n ^ 2 + n = n ^ 3 + 2 n ^ 2 + n
因此 , ( n ^ 2 + n ) • ( n + 1 ) 的增长量级是 O ( n ^ 3 ) .
在求增长量级的过程中 , 我们只需要保留式子中的最高次项 , 即 n ^ 3 , 忽略其他低阶项和常数项 .
* 3. 如果f是O ( g ) , 对于未指定的函数g , 我们怎么说af + b?
如果 f 是 O ( g ) , 其中 g 未指定函数 , 则对于任意常数 a 和 b , 函数 af + b 的增长量级仍然是 O ( g ) .
* 4. 如果f1和f2都是O ( g ) , 那么f1 + f2呢?
如果 f1 和 f2 都是 O ( g ) , 则 f1 + f2 的增长量级仍然是 O ( g ) .
这是因为在 f1 和 f2 的增长量级相同时 , 它们的和的增长量级也相同 .
* 5. 如果f1是O ( g ) 而f2是O ( h ) , 那么f1 + f2呢?
如果 f1 是 O ( g ) 而 f2 是 O ( h ) , 则 f1 + f2 的增长量级取决于 g 和 h 的相对增长速度 .
如果 g 的增长速度比 h 快 , 那么 f1 的增长将主导 f1 + f2 的增长 ,
因此 f1 + f2 的增长量级为 O ( g ) . 如果 h 的增长速度比 g 快 ,
那么 f2 的增长将主导 f1 + f2 的增长 , 因此 f1 + f2 的增长量级为 O ( h ) .
如果 g 和 h 的增长速度相同 , 则 f1 + f2 的增长量级为 O ( g ) 或 O ( h ) .
* 6. 如果f1是O ( g ) 而f2是O ( h ) , 那么f1•f2呢?
如果 f1 是 O ( g ) 而 f2 是 O ( h ) , 则 f1•f2 的增长量级为 O ( g•h ) .
这是因为 f1 和 f2 的增长量级分别是 g 和 h , 因此 f1•f2 的增长量级为 g•h .
关心程序性能的程序员常常会觉得这种分析很难理解 .
它们有道理 : 有时候系数和非首项也能带来不同 .
有时候硬件的细节 . 编程语言 , 以及输入的特征 , 都能带来很大的区别 .
并且对应小规模问题来说 , 渐进行为是无关紧要的 .
但如果在闹钟记着这些需要注意的要点的话 , 算法分析毕竟是一个有用的工具 .
至少对于大规模问题来说 , '更好' 的算法往往确实更好 , 并且有时候它会好的多 .
两个增长量级相同的算法的区别往往是一个常量值 , 但一个好算法和一个坏算法的差距是没有界限的 !
在Python中大部分算法操作都是常量时间的 ;
乘法通常比加法和减法花费更多的时间 , 而除法花费的时间更多 , 但这些操作的时间与参数大小无关 .
特别大的整数是一个例外 , 在哪种情况下 , 运行时间随数字的位数增加而增加 .
索引操作-在序列或字典中写入元素-也是常量时间的 , 与数据结构的规模无关 .
遍历一个序列或字典的for循环通常是线性的 , 只要循环体内的操作本身是常量级 .
例如 , 将一个列表的元素相加时线性的 :
total = 0
for x in t:
total += x
内置函数sum也是线性的 , 因为它做相同的事情 . 但它趋向于更快些 , 因为实现得更高效 .
用算法分析的语言来说 , 就是它有一个更小的首项系数 .
作为一个经验规则 , 如果循环体的增长量级是O ( n ^ 2 ) 则整个循环时是 ( n ^ ( a + 1 ) ) .
例外情况是当你能够证明循环在一个常量数的迭代之后就能退出 .
如果不论n是多少 , 循环只最多运行k次 , 则即使对很大的k来说 , 整个循环的增长级还是O ( n ^ a ) .
乘以k并不会改变增长量级 , 而除法也不会 .
所以 , 如果一个循环体的增长量级是O ( n ^ a ) , 那么它运行n / k次 ,
即使对很大的k来说 , 整个循环的增长量及也任然是O ( n ^ ( a + 1 ) ) .
大部分字符串和元组操作时线性的 , 只有下标访问和len函数例外 , 它们是常量级时间的 . 内置函数min和max是线性的 .
切片操作的运行时间与输出的长度成正比 , 而与输入的长度无关 .
字符串拼接是线性的 , 它的运行时间以操作数的长度的总和有关 .
所有的字符串方法都是线性的 , 但如果字符串的长度受限于一个常量 ( 例如 , 在只有一个字符串的字符串的操作 ) ,
可以看作是常量的 . 字符串方法join是线性的 , 它的运行时间与字符串的总长度有关 .
大多数列表方法是线性的 , 但也有一些例外 .
* 在列表结尾处添加一个元素的操作平均来说是常量时间的 ; 当它空间不足时 , 偶尔会复制到另一个更大的地方 .
但总的n次操作的时间量级是O ( n ) , 所以每次操作的平均时间是O ( 1 ) .
* 从列表结尾删除一个元素的操作是常量时间的 .
* 排序的量级是 0 ( nlogn ) .
大部分字典操作和方法都是常量时间的 , 但也有一些例外 .
* update的运行和作为参数传入的字典的大小成正比 , 而不是被更新的字典本身 .
* keys , values和items都是常量时间 , 因为它们返回的迭代器 .
但是 , 如果循环遍历这个迭代器 , 则循环时线性的 .
字典的效率是计算机科学的一个小奇迹 . 我们会在 21.4 节中介绍它是如何工作的 .
在http : / / en . wikipedia . org / wiki / Sorting_algorithm阅读排序算法的维基百科页面并回答下列问题 .
* 1. 什么是 '比较排序' ? , 比较排序的最坏情况的增长量级最好是什么?
任意排序算法中 , 最坏情况的增长量级最好是多少?
比较排序是通过比较元素之间的大小关系来排序的算法 .
最坏情况的增长量级最好是 O ( nlogn ) . 对于任意排序算法来说 , 最坏情况的增长量级最好也是 O ( nlogn ) .
* 2. 冒泡排序的增长量级是多少? 为什么奥巴马认为它是 '错误的做法' ?
冒泡排序的增长量级是 O ( n ^ 2 ) .
奥巴马认为它是错误的做法是因为它的时间复杂度太高 , 而且在大多数情况下 , 它的表现都比其他排序算法要差 .
* 3. 基数排序的增长量级是多少? 要使用它 , 我们需要哪些前置条件?
基数排序的增长量级是 O ( dn ) , 其中 d 是数字的位数 . 要使用基数排序 , 需要满足以下前置条件:
a . 元素是可以分解为整数位的数字的形式 .
b . 元素之间有明确的大小关系 .
c . 要排序的元素的范围不是很大 .
* 4. 稳定排序是什么? 为什么在实践中它很重要?
稳定排序是指在排序过程中 , 如果有两个元素相等 , 那么它们在排序后的序列中相对位置不会改变 .
在实践中 , 稳定排序非常重要 , 因为它可以保留原始数据中的排序关系 , 避免在排序后失去数据的有用信息 .
* 5. 最差的 ( 有名字的 ) 排序算法是什么?
最差的排序算法是 bogosort , 也称为 stupid sort 或者 permutation sort .
它的时间复杂度是 O ( n * n ! ) , 因此在大多数情况下 , 它的表现都非常糟糕 .
* 6. C语言库里用的排序算法是什么? Python里用的是什么? 这些算法稳定吗?
你可能需要去Google搜索这些答案 .
在 C 语言库中 , 常用的排序算法是 quicksort、mergesort 和 heapsort . 在 Python 中 , 常用的排序算法是 timsort , 它结合了 mergesort 和 insertion sort 的思想 . 这些算法都是稳定的 .
* 7. 很多非计较排序都是线性的 , 那么为什么Python会使用O ( nlogn ) 的比较排序呢?
许多非比较排序算法都是线性的 , 但它们通常具有比较严格的前置条件 , 只能用于特定类型的数据 .
而比较排序算法则适用于所有类型的数据 , 并且在大多数情况下表现都很好 .
因此 , Python 使用 O ( nlogn ) 的比较排序算法 , 以便能够应对各种情况下的排序需求 .
搜索是一种算法 , 接收一个集合和一个目标元素 , 并决定这个元素是否在集合中 , 通常返回元素的索引 .
最简单的搜索算法是 '线性搜索' , 即按顺序遍历集合的每一个元素 , 直到找到目标元素为止 .
在最坏的情况下 , 它会遍历整个集合 , 所以运行时间是线性的 .
序列的in操作符使用一个线性搜索 ; 字符串方法find和cound也是这样的 .
如果序列中的元素是排好的 , 可以使用 '二分查找' , 它的增长量级是O ( log n ) .
二分法查找和在字典 ( 真实的字典 , 而不是那个数据结构 ) 中查找单词的算法类似 .
不想普通搜索那样从第一个元素开始 , 它是从序列的中间开始 , 检查查找的词是在中间的元素之前还是之后 .
如果在之前 , 则继续查找序列的前半段 , 否则查找后半段 .
不论哪种情况 , 都可以将查找的数量减少一半 .
如果序列有 1 000 000 个元素 , 大概需要花 20 个步骤找到单词或者发现它不存在 .
所有那样会比线性查找快大概 50 000 倍 .
二分查找可以比线性查找快很多 , 但需要序列本身是排好序的 , 也就需要一些额外工作 .
有另一个数据结构 , 称为散列表 ( hashtable ) , 它甚至更快-它可以用常量时间来搜索-而不需要元素是排好序的 .
Python字典是使用散列表实现的 , 因此大部分字典操作 , 包括in操作符 , 都是常量时间的 .
为了解释散列表的工作机制以及为何它的效率如此好 , 我们先从一个简单的映射实现开始 ,
并逐步改善它 , 直到成为一个散列表 .
我使用Python来展示这些实现 . 但真实世界中 , 你不需要用Python写这样的代码 , 你只需要直接使用字典即可 !
所有本章中剩下的本分 , 你需要想要字典并不存在 , 而你需要实现一个数据结构将键隐射到值 .
你需要实现的操作有以下几个 .
add( k, v)
添加一个新项 , 将键k映射戴值v .
在Python字典d中 , 这个操作写在d [ k ] = v ,
get( k)
根据键k查找对应的值 . 在Python字典d中 , 这个操作写作d [ k ] 或d . get ( f ) .
就现在来说 , 我假设每个键只出现一次 . 最简单的实现是使用一个元组列表 , 每个元组是一个键值对 :
class LinearMap :
def __init__ ( self) :
self. items = [ ]
def add ( self, k, v) :
self. items. append( ( k, v) )
def get ( self, k) :
for key, val in self. items:
if key == k:
return val
raise KeyError
add往元组列表中添加一项 , 这个操作是常量时间的 .
get使用一个for循环来搜索列表 : 如果找找了目标 , 则返回对应的值 ; 否则抛出KeyError . 所有get是线性的 .
另一个方案是让列表按照键来排序 . 这样get就可以使用二分法查找 , 其增长量级是O ( logn ) .
但插入一个新项到列表中间是线性的 , 所以这可能也不是最好的选择 .
也有数据结构可以用对数时间好 , 所有我们继续 .
改善LinearMap的方法之一是将键值对的列表拆分成更小的列表 .
下面是一个称为BetterMap的实现 , 它是一个包含 100 个LinearMap的列表 .
我们接下来会看到 , get的增长量级仍然是线性的 , 但是BetterMap散列表更近一步 .
class BetterMap :
def __init__ ( self, n= 100 ) :
self. maps = [ ]
for i in range ( n) :
self. maps. append( LinearMap( ) )
def find_map ( self, k) :
index = hash ( k) % len ( self. maps)
return self. maps[ index]
def add ( self, k, v) :
m = self. find_map( k)
m. add( k, v)
def get ( self, k) :
m = self. find_map( k)
return m. get( k)
class LinearMap :
def __init__ ( self) :
self. items = [ ]
def add ( self, k, v) :
self. items. append( ( k, v) )
def get ( self, k) :
for key, val in self. items:
if key == k:
return val
raise KeyError
class BetterMap :
def __init__ ( self, n= 100 ) :
self. maps = [ ]
for i in range ( n) :
self. maps. append( LinearMap( ) )
def find_map ( self, k) :
index = hash ( k) % len ( self. maps)
print ( 'key的哈希值:%s \nindex的值:%s' % ( hash ( k) , index) )
return self. maps[ index]
def add ( self, k, v) :
m = self. find_map( k)
m. add( k, v)
def get ( self, k) :
m = self. find_map( k)
return m. get( k)
obj = BetterMap( )
obj. add( 'k1' , 'v1' )
res = obj. get( 'k1' )
print ( res)
"""
key的哈希值:-111025584990275242
index的值:58
key的哈希值:-111025584990275242
index的值:58
v1
"""
__init__创建有n个LinearMap组成的列表 .
find_map被add和get调用 , 用来确定用哪个映射来保存新项 , 或者到哪个映射里去搜索 .
find_map使用内置函数hash , 它接收几乎所有的Python对象 , 并返回一个整数 .
这个实现的限制之一是它只对可散列的键类型可以 .
可变类型 , 如列表的和字典 , 是不可散列的 .
两个认为相等的可散列对象会返回相同的散列值 ,
但反过并不一定是真 : 两个具有不同值的对象可以返回相同的散列值 .
find_map使用求余操作符来将散列值封装到 0 到len ( self . maps ) 的范围中 , 这样结果是列表的一个合法索引 .
当然 , 这意味这很多不同的散列值会封装到用一个索引上 .
但如散列函数将对象分配地很均匀 ( 这也是散列表函数设计的目标 ) , 那么我们预计每个LinearMap有n / 100 个项 .
因为LinearMap . get的运行时间是和其包含的项数成正比的 , 所以我们预计BetterMap会比LinearMap快 100 倍 .
增长量级仍然是线性 , 但首项系数更小 . 这很好 , 但仍然不如散列表好 .
下面 ( 终于 ) 是让散列表能变快的光键原因 : 如果你能保证LinearMap的长度有限 , LinearMap . get则会是常量时间 .
你需要做的只是记录元素的总数 , 并当每个LinearMap的大小超过一个阈值时 ,
重新划分散列表 , 添加更多的LinearMap .
下面是一个散列表的实现 :
class HashMap :
def __init__ ( self) :
self. maps = BetterMap( 2 )
self. num = 0
def get ( self, k) :
return self. maps. get( k)
def add ( self, k, v) :
if self. num == len ( self. maps. maps) :
self. resize( )
self. maps. add( k, v)
self. num += 1
def resize ( self) :
new_maps = BetterMap( self. num * 2 )
for m in self. maps. maps:
for k, v in m. items:
new_maps. add( k, v)
self. maps = new_maps
每个HashMap都包含一个BetterMap__init__从 2 个LinearMap开始 , 并初始化num , 它会用来记录总的项数 .
get只需要分配到对应的BetterMap . 真正的工作都发生在add中 , 它会检查项数和BetterMap的大小 :
如果相等 , 那么每个LinearMap的平均项数是 1 , 所以它调用resize .
resize创建一个新的BetterMap , 比之前大一倍 , 并将旧有的映射中的项 '重新散列' 到新的映射中 .
重新散列时有必要的 , 因为LinearMap的数量的改变 , 导致find_map的求余操作的分母改变 .
也就是说 , 有些原先会散列到用一个LinearMap的项会分配到不同的LinearMap中 ( 这也是我们想要的 , 对吧? )
重新散列时线性的 , 所以resize是线性的 , 看起来可能不好 , 因为我保证过add应当是常量时间的 .
但请记得我们并不是每次都需要进行resize , 所有add通常是常量时间的 , 只是偶尔会线性 .
add运行n次的总时间和n成正比的 , 因此每次调用add的平均时间是常量时间 !
要明白散列表如何工作 , 考虑从一个空的HashTable开始 , 并添加一些项 .
我们从 2 个LinearMap开始 , 所有最开始两个add会很快 ( 不需要resize ) .
我们说它们每次花费一单位的工作量 . 下一个add会需要resize , 所有我们需要重新散列前两项
( 我们说着需要再加 2 个单位的工作量 ) 并添加一个新项 ( 再加 1 个单位 ) .
再添加一项花费 1 单位 , 所以至今为止是 4 项 , 花费了 6 个单位的工作 .
下一个add需要 5 个单位 , 但接着的 3 个都只需要 1 个单位 , 所以总共是 8 项花费了 14 单位 .
再下一个add需要 9 个单位 , 但接着我们可以在再次resize之前添加 7 项 , 所以总和是 16 个add花费了 30 单位 .
在 32 个add时 , 总共的花费是 62 单位 , 为我希望你已经开始看到其中的模式了 .
在n个add之后 , 假设n是 2 的乘方 , 总得花费是 2 n- 2 单位 , 所以平均每个add的工作量是稍微小于 2 个单位的 .
当n是 2 的乘方时 , 这是最好情况 ; 对于其他的n值 , 平均工作量稍高一点 , 但这并不重要 . 重要的是这是O ( 1 ) .
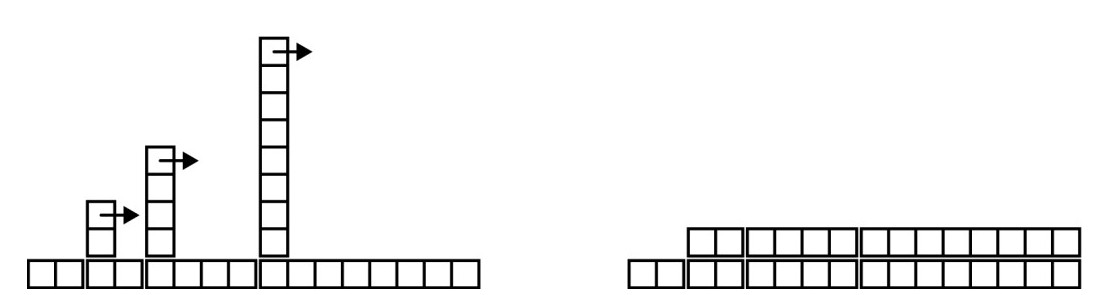
下图 ( 散列表add的消耗 ) 用图形画的方式展示了这个过程 . 每个方块代表一个单位的工作量 .
每一列显示每个add的工作量 : 从左到右 , 前两个add花费 1 单位 , 第三个花费 3 单位 , 等等 .
多余的重新散列表的工作看起来像一序列不断增高的塔 , 之间的间隔越来越远 .
现在如果你将塔推倒 , 将resize的花费均摊到所有add操作上 , 就会发现n个add之后总的花费是 2 n- 2.
这个算法的一个重要特点是当我们调整HashTable的大小时 , 它会几何增长 ; 也就是 , 我们乘以一个常量到大小上 .
如果算术地增加大小-每次添加固定数量的数-那么每个add的平均时间是线性的 .
可以从↓下载我的HashMap实现 , 但请记住并没有使用它的理由 . 如果需要一个映射 , 直接使用Python字典即可 .
https : / / github . com / AllenDowney / ThinkPython2 / blob / master / code / Map . py
算法分析 ( analysis of algorithms ) : 通过对比运行时间以及 / 或者空间需求来对比算法的方法.
机器模型 ( machine model ) : 用于描述算法的简化的计算机表示形式 .
最坏情况 ( worst case ) : 让指定算法运行最慢 ( 或者需要最多空间的 ) 的输入 .
首项 ( leading term ) : 在多项式中 , 指数最高的项 .
交叉点 ( crossover point ) : 两个算法需要相同的运行时间或空间的问题规模 .
增长量级 ( order of growth ) : 在算法分析时 , 如果我们认为一组函数的增长速度可以看作相等 ,
则将这组函数称为同一个增长量级的 . 例如 , 所有线性增长的函数都属于同一个增长量级 .
大O标记法 ( Big-Oh notation ) : 表示增长量级的方法 . 例如 , O ( n ) 表示所有线性增长的函数集合 .
线性 ( linrat ) : 运行时间和问题规模 ( 至少对于大规模来说 ) 成正比的算法 .
平方量级 ( quadratic ) : 运行时间和n ^ 2 成正比的算法 , 其中n指的是问题规模 .
搜索 ( search ) : 定位集合 ( 如列表和字典 ) 中某个元素或者判定它不在其中的问题 .
散列表 ( hashtable ) : 一种表示键值对集合且搜索时常量级的数据结构 .
< < 像计算机科学家一样思考 > > 这一系列数 , 早有耳闻 , 他可谓开创了程序设计入门书的一个新思路 .
授人以鱼 , 不若授人以渔 ; 教人编程 , 不如引导人思考 ; 教人语言细节 , 不若指明语言精要 .
而结合Python语言之后 , 得到的 < < 项计算机科学家一样思考Python > > 这本书 ,
则是在这个思路上走到一个极致的佳作 .
我是工作之后才开始接触Python的 .
在那之前一直使用C / C + + , java , C # 等传统风格的语言 , 再看到Python , 不免有耳目一新之感 .
为何以往觉得晦涩难懂的程序设计理念 , 在Python中却表达得这么简单易懂?
为何以往需要绞尽脑计才能拼出来的大段代码 , 在Python里却只需要几个简单调用即可?
为何繁杂的集合操作 , 在Python中却只需要一个行列表理解循环语句就完成了?
为何Python的文档那么容易找 , 还可以使用交互模式轻松尝试?
每次使用Pyhton编写程序之后 , 总会感慨 , 当初初学程序设计语言的时候 , 如果教的是Python该多好 .
想信所有学过C / C + + 之后再接触Python这类语言的任 , 都会有相同的感受吧 .
那么是什么原因让C / C + + 几乎垄断了程序设计语言的教材呢? 我觉得更多的是历史惯性 .
在计算机科学教育开始普及的 20 世纪 70 , 80 年代 , C语言正在其鼎盛时期 , 几乎所有的人都在用C开发程序 ,
软件 , 游戏几乎都是用C甚至汇编开法的 .
硬件性能的限制 , 让那些更抽象 , 更高阶的语言 , 无法普及开来 . 因此教学自然也使用它 .
久而久之形成了惯性 , 到了新世纪 , 程序设计的教学已经搞不上语言发展的潮流了 .
我们的程序越来越复杂 , 越来越像人脑 , 而教学的语言任然在使用高级语言中最贴近机器的C .
而C + + , Java , C # , 虽然相对于C更抽象高阶 , 但由于这些语言设计的初衷仍是以拓展C为主 ,
所有不过是在这一惯性上多走了五十步而已 .
本书正是扭转这种矛盾局面的一个有益的尝试 .
< < 像计算机科学家一样思考 > > 是对程序设计教学模式的真谛的领悟 , 而使用Python这种简洁强大的高阶语言 ,
而使用Python这种简洁强大的高阶语言 , 也正是这种思路最贴切的贯彻 .
授人以渔 , 自然应当用最好的渔具 ; 引导人思考 , 当然也应使用更贴近人的思路而不是机器思路的语句 .
Python在高阶语言中 , 是一个从理念和实际综合考量后非常合适的候选 .





![[大模型]XVERSE-7B-chat langchain 接入](https://img-blog.csdnimg.cn/direct/449c21e11ca6407595ccc83d31000e7d.png#pic_center)