一、简介
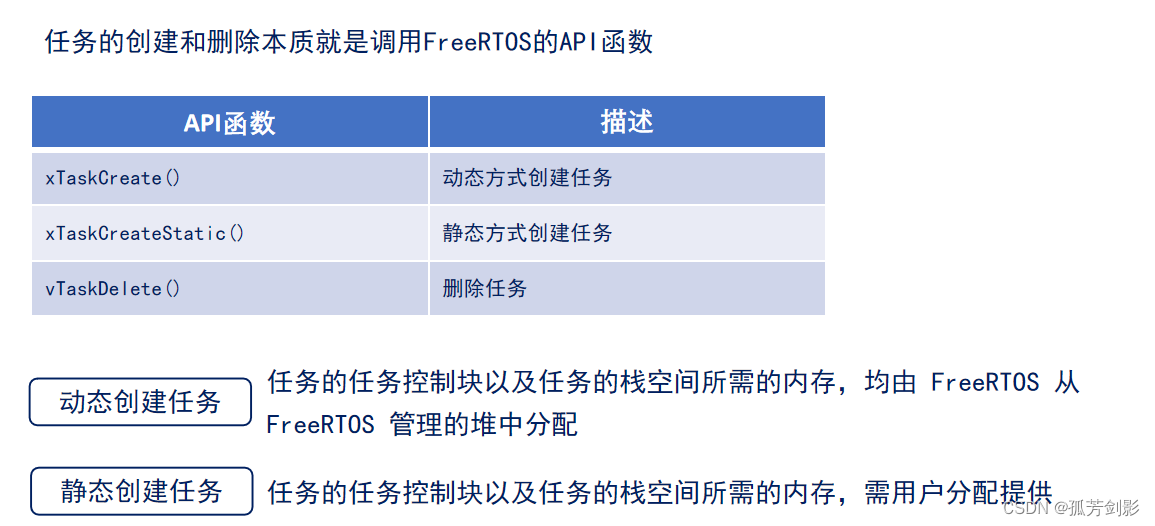
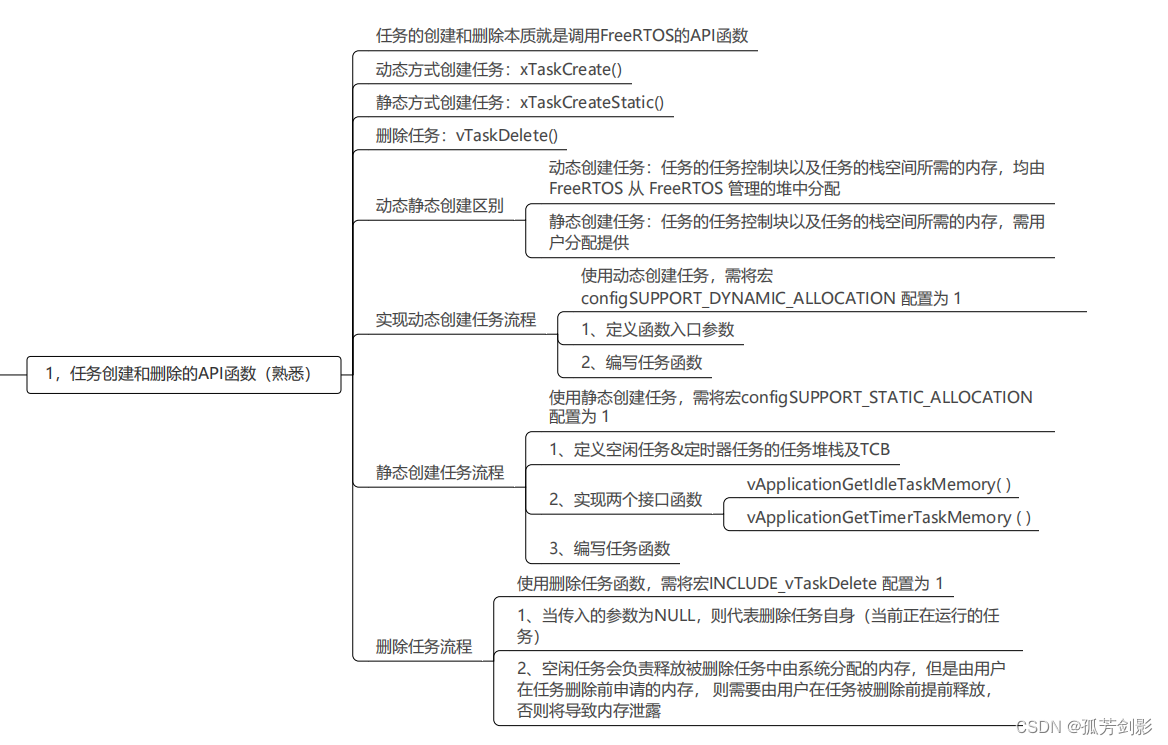
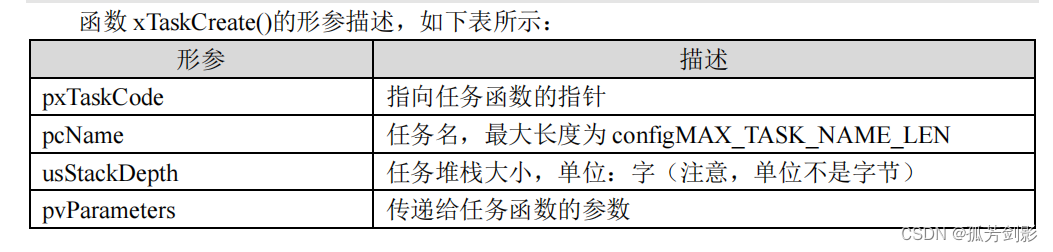
二、动态创建任务函数:xTaskCreate()
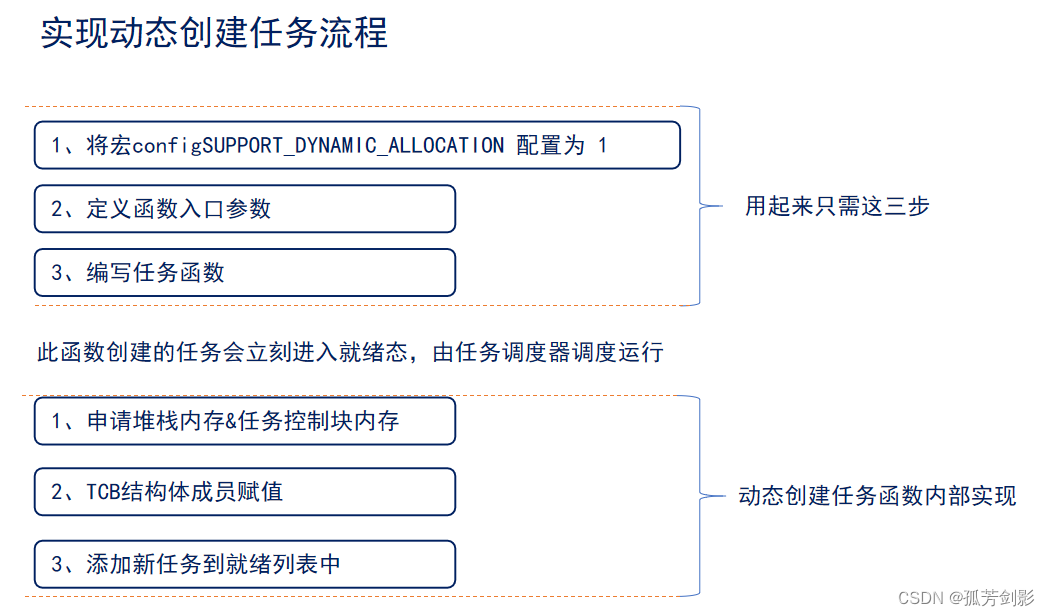
此函数用于使用动态的方式创建任务,任务的任务控制块以及任务的栈空间所需的内存,均由 FreeRTOS 从 FreeRTOS 管理的堆中分配,若使用此函数,需要在 FreeRTOSConfig.h 文件
中将宏 configSUPPORT_DYNAMIC_ALLOCATION 配置为 1。此函数创建的任务会立刻进入就
绪态,由任务调度器调度运行。函数原型如下所示:
BaseType_t xTaskCreate(
TaskFunction_t pxTaskCode,
const char * const pcName,
const configSTACK_DEPTH_TYPE usStackDepth,
void * const pvParameters,
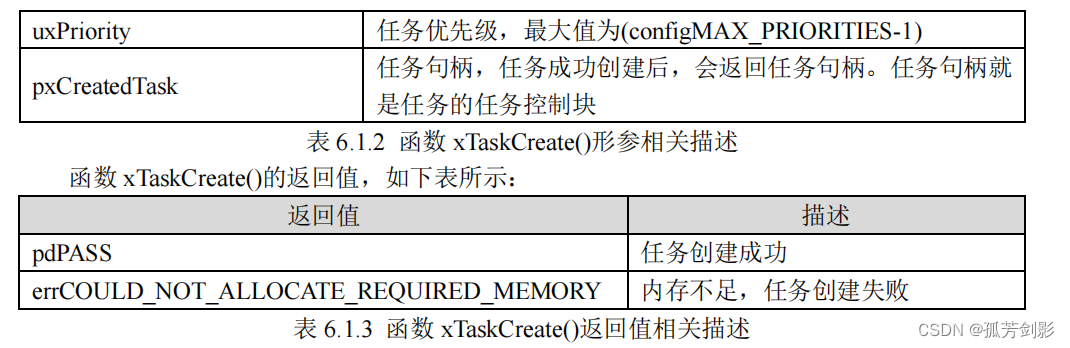
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask);
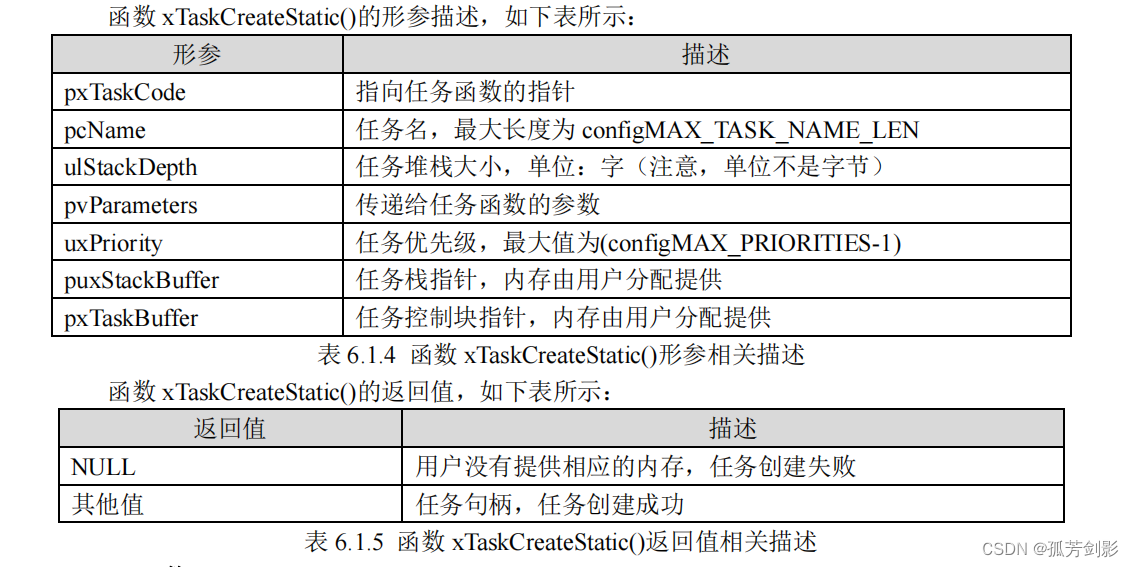
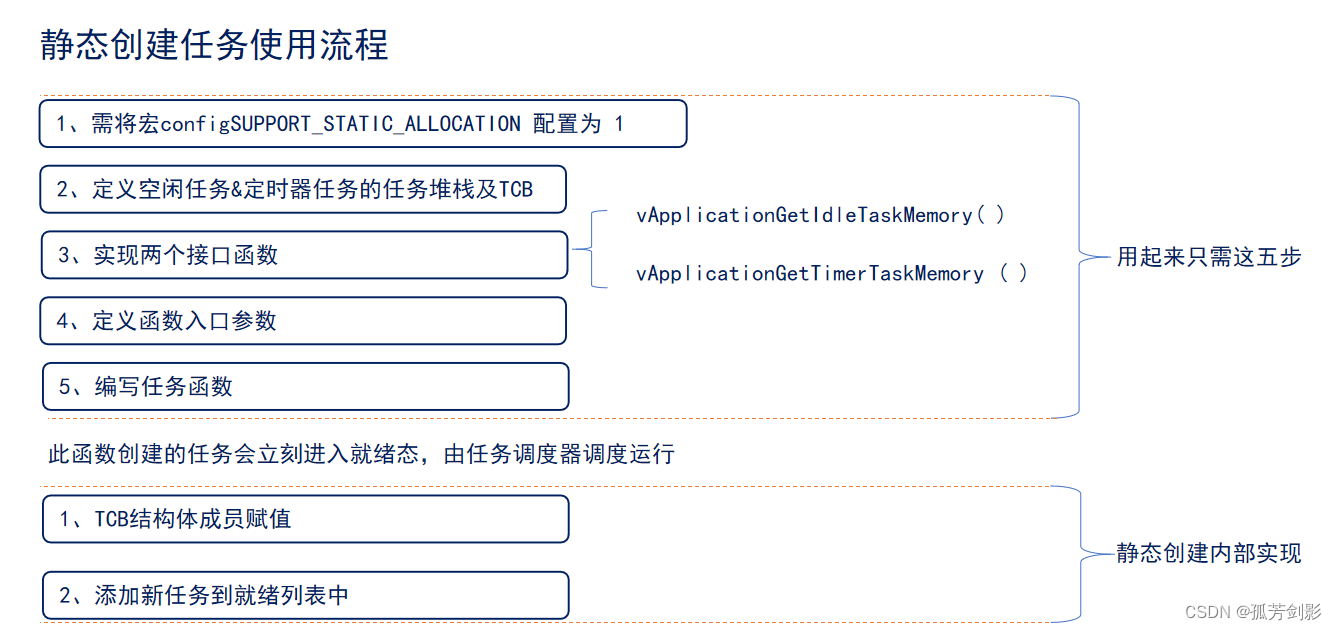
三、静态创建任务函数:xTaskCreateStatic()
此函数用于使用静态的方式创建任务,任务的任务控制块以及任务的栈空间所需的内存,
需要由用户分配提供, 若使用此函数,需 要 在 FreeRTOSConfig.h 文件中将宏
configSUPPORT_STATIC_ALLOCATION 配置为 1。此函数创建的任务会立刻进入就绪态,由任
务调度器调度运行。函数原型如下所示:
TaskHandle_t xTaskCreateStatic(
TaskFunction_t pxTaskCode,
const char * const pcName,
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
StackType_t * const puxStackBuffer,
StaticTask_t * const pxTaskBuffer);
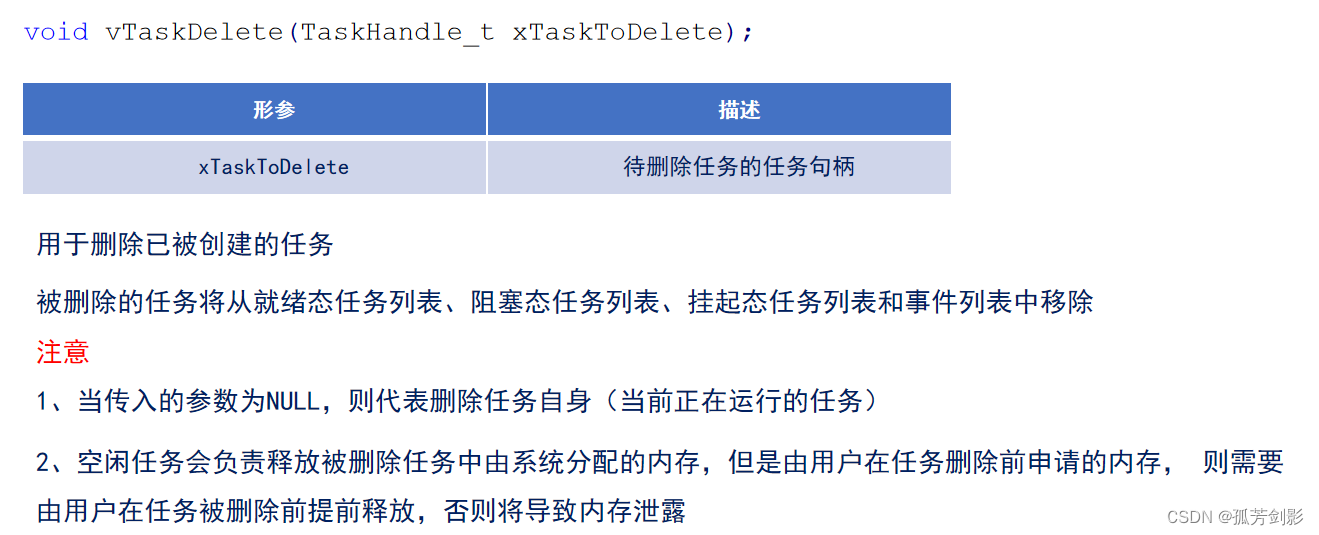
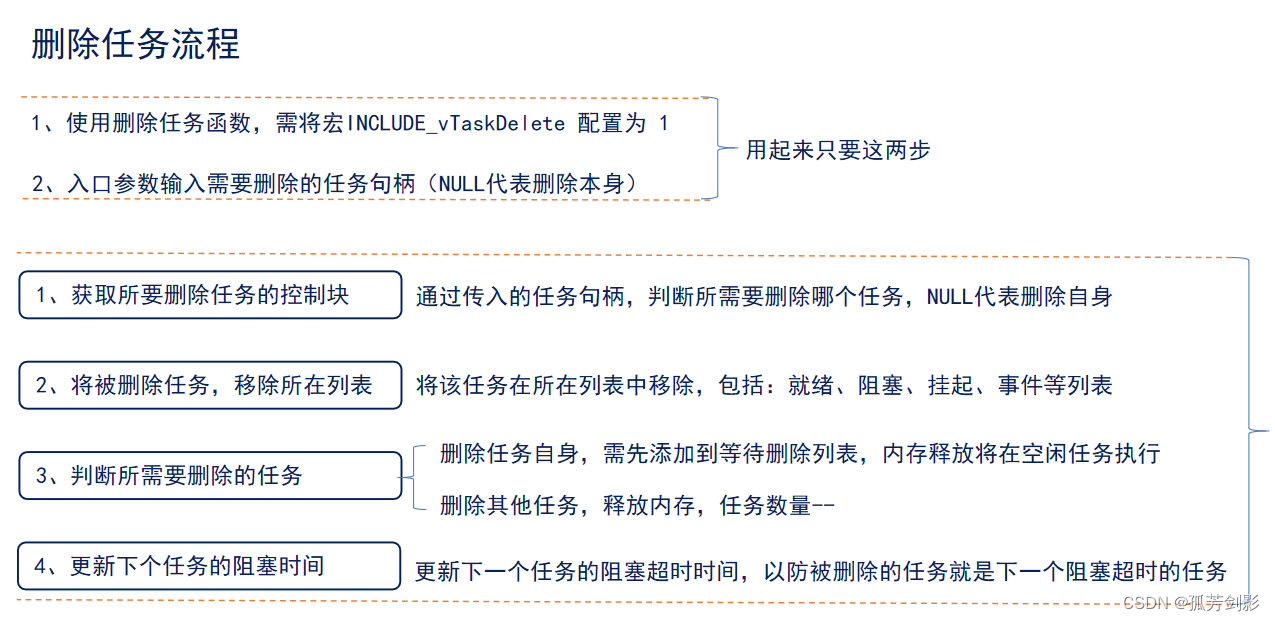
四、任务删除函数:vTaskDelete()
此函数用于删除已被创建的任务,被删除的任务将被从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除,要注意的是,空闲任务会负责释放被删除任务中由系统分配的内存,但是由用户在任务删除前申请的内存,则需要由用户在任务被删除前提前释放,否则将导致内存泄露。若使用此函数,需要在FreeRTOSConfig.h文件中将宏INCLUDE_vTaskDelete配置为 1。函数原型如下所示:
void vTaskDelete(TaskHandle_t xTaskToDelete);


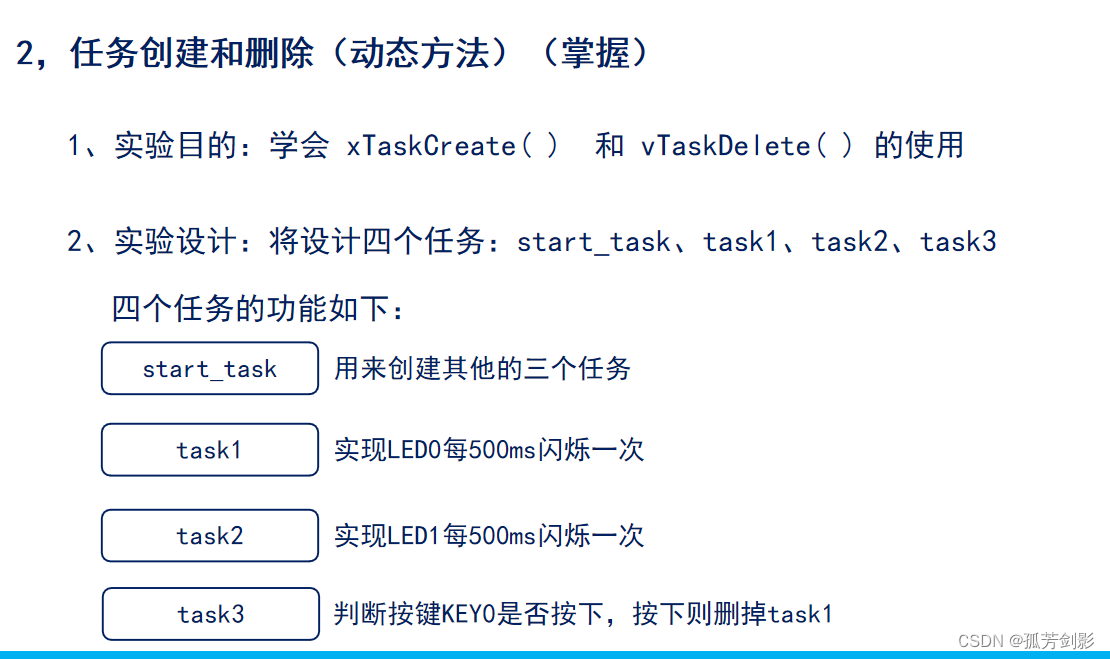
五、相关实验
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate((TaskFunction_t ) start_task,
(char * ) "start_task",
(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(TaskHandle_t * ) &start_task_handler );
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
xTaskCreate((TaskFunction_t ) task3,
(char * ) "task3",
(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(TaskHandle_t * ) &task3_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
/* 任务二,实现LED1每500ms翻转一次 */
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
/* 任务三,判断按键KEY0,按下KEY0删除task1 */
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key = key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler != NULL)
{
printf("删除task1任务\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
}
vTaskDelay(10);
}
}