rk3588s: 旋转编码器input输入事件适配
基于Android 12 + kernel-5.10版本
参考文档:
https://blog.csdn.net/szembed/article/details/131551950
Linux 输入设备调试详解(零基础开发)Rotary_Encoder旋转编码器驱动 通用GPIO为例 挂载input输入子系统
https://source.android.google.cn/docs/core/interaction/input?hl=zh-cn
https://developer.android.google.cn/reference/android/support/wearable/input/RotaryEncoder
https://developer.android.google.cn/training/wearables/user-input/rotary-input?hl=zh-cn
旋转输入
某些 Wear OS 设备包含实体侧面旋钮。当用户旋转此类旋钮时,应用的当前视图会向上或向下滚动。此类输入称为“旋转输入”。
1,驱动层配置
配置设备树,使用已有的rotary_encoder.c驱动代码。
linux驱动设备树配置参考:
https://elixir.bootlin.com/linux/latest/source/drivers/input/misc/rotary_encoder.c
https://elixir.bootlin.com/linux/latest/source/arch/arm64/boot/dts/freescale/imx8mn-dimonoff-gateway-evk.dts
rotary: rotary-encoder {
compatible = "rotary-encoder";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_rotary>;
gpios = <&gpio5 12 GPIO_ACTIVE_LOW>, /* A */
<&gpio5 13 GPIO_ACTIVE_LOW>; /* B */
linux,axis = <0>; /* REL_X */
rotary-encoder,relative-axis;
};
pinctrl_rotary: rotarygrp {
fsl,pins = <
MX8MN_IOMUXC_ECSPI2_MISO_GPIO5_IO12 0x00000156
MX8MN_IOMUXC_ECSPI2_SS0_GPIO5_IO13 0x00000156
>;
};
2,framework层适配
上面驱动层配置好设备树后,通过getevent能看到rotary encoder事件。
但是,应用App层却收不到。
旋转编码器input输入事件和鼠标滚轮类似,设备上鼠标滚轮事件是正常的。
于是,先看鼠标滚轮事件。
鼠标滚轮:
$ adb shell getevent -lpi
add device 2: /dev/input/event2
bus: 0003
vendor 093a
product 2533
version 0111
name: "Gaming Mouse"
location: "usb-fc840000.usb-1/input0"
id: ""
version: 1.0.1
events:
KEY (0001): BTN_MOUSE BTN_RIGHT BTN_MIDDLE BTN_SIDE
BTN_EXTRA
REL (0002): REL_X REL_Y REL_WHEEL REL_WHEEL_HI_RES
MSC (0004): MSC_SCAN
input props:
<none>
adb shell dumpsys input
2: Gaming Mouse
Classes: CURSOR | EXTERNAL
Path: /dev/input/event2
Enabled: true
Descriptor: 922b2be403d5734c3dacd1c480566209f0f39e80
Location: usb-fc840000.usb-1/input0
ControllerNumber: 0
UniqueId:
Identifier: bus=0x0003, vendor=0x093a, product=0x2533, version=0x0111
KeyLayoutFile:
KeyCharacterMapFile:
ConfigurationFile:
VideoDevice: <none>
01-11 03:13:33.710 569 663 I EventHub: New device: id=6, fd=181, path='/dev/input/event2', name='Gaming Mouse', classes=CURSOR | EXTERNAL, configuration='', keyLayout='', keyCharacterMap='', builtinKeyboard=false,
01-11 03:13:33.714 569 663 I InputReader: Device added: id=5, eventHubId=6, name='Gaming Mouse', descriptor='922b2be403d5734c3dacd1c480566209f0f39e80',sources=0x00002002
rotary encoder事件信息
rotary encoder事件信息
$ adb shell getevent -lpi
add device 2: /dev/input/event0
bus: 0019
vendor 0000
product 0000
version 0000
name: "rotary" // 设备名是rotary
location: ""
id: ""
version: 1.0.1
events:
REL (0002): REL_X
input props:
<none>
添加rotary.idc文件,用于framework层识别rotary encoder设备
framework层代码流程分析:
frameworks/native/services/inputflinger/reader/EventHub.cpp
// Load the configuration file for the device.
device->loadConfigurationLocked();
// 要想rotary encoder旋转编码器被framework层识别到需要的条件:要有configuration文件且device.type为rotaryEncoder
// See if this is a rotary encoder type device.
String8 deviceType = String8();
if (device->configuration &&
device->configuration->tryGetProperty(String8("device.type"), deviceType)) {
if (!deviceType.compare(String8("rotaryEncoder"))) {
device->classes |= InputDeviceClass::ROTARY_ENCODER;
}
}
// 根据设备名找configuration配置文件,adb shell getevent -lpi 查看到设备名是name: "rotary"
// Try device name.
return getInputDeviceConfigurationFilePathByName(deviceIdentifier.getCanonicalName(), type);
先在android源代码device目录grep -r "rotaryEncoder"搜索看看是否有类似配置。
搜索到virtio_input_rotary.idc,所以,执行如下操作验证framework层就能识别到旋转编码器设备了,
cp device/generic/goldfish/input/virtio_input_rotary.idc rotary.idc
adb push rotary.idc /system/usr/idc/
添加rotary.idc文件,虽然framework层识别到了rotary encoder设备,但是事件还是报不到App层。继续分析。(原因是:rotary encoder报的事件是 EV_REL REL_X,而RotaryEncoderInputMapper没有解析REL_X事件。因此,需要适配解析REL_X事件)
打开DEBUG_INBOUND_EVENT_DETAILS log开关后,验证旋转编码器的input事件,
能看到log时,说明App层就能收到事件,如果打印不出该log,则App层收不到事件。
void InputDispatcher::notifyMotion(const NotifyMotionArgs* args) {
#if DEBUG_INBOUND_EVENT_DETAILS
ALOGD("notifyMotion - id=%" PRIx32 " eventTime=%" PRId64 ", deviceId=%d, source=0x%x, "
"displayId=%" PRId32 ", policyFlags=0x%x, "
"action=0x%x, actionButton=0x%x, flags=0x%x, metaState=0x%x, buttonState=0x%x, "
"edgeFlags=0x%x, xPrecision=%f, yPrecision=%f, xCursorPosition=%f, "
"yCursorPosition=%f, downTime=%" PRId64,
args->id, args->eventTime, args->deviceId, args->source, args->displayId,
args->policyFlags, args->action, args->actionButton, args->flags, args->metaState,
args->buttonState, args->edgeFlags, args->xPrecision, args->yPrecision,
args->xCursorPosition, args->yCursorPosition, args->downTime);
for (uint32_t i = 0; i < args->pointerCount; i++) {
ALOGD(" Pointer %d: id=%d, toolType=%d, "
"x=%f, y=%f, pressure=%f, size=%f, "
"touchMajor=%f, touchMinor=%f, toolMajor=%f, toolMinor=%f, "
"orientation=%f",
i, args->pointerProperties[i].id, args->pointerProperties[i].toolType,
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_X),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_Y),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_PRESSURE),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_SIZE),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_TOUCH_MAJOR),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_TOUCH_MINOR),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_TOOL_MAJOR),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_TOOL_MINOR),
args->pointerCoords[i].getAxisValue(AMOTION_EVENT_AXIS_ORIENTATION));
}
#endif
RotaryEncoderInputMapper解析旋转编码器的input事件数据
RotaryEncoderInputMapper::sync() 函数解析旋转编码器的input事件
$ adb shell getevent -l
add device 1: /dev/input/event0
name: "rotary"
/dev/input/event0: EV_REL REL_X 00000001
/dev/input/event0: EV_SYN SYN_REPORT 00000000
/dev/input/event0: EV_REL REL_X ffffffff
/dev/input/event0: EV_SYN SYN_REPORT 00000000
86 void RotaryEncoderInputMapper::process(const RawEvent* rawEvent) {
87 mRotaryEncoderScrollAccumulator.process(rawEvent);
88
89 if (rawEvent->type == EV_SYN && rawEvent->code == SYN_REPORT) {
90 sync(rawEvent->when, rawEvent->readTime);
91 }
92 }
93
94 void RotaryEncoderInputMapper::sync(nsecs_t when, nsecs_t readTime) {
95 PointerCoords pointerCoords;
96 pointerCoords.clear();
97
98 PointerProperties pointerProperties;
99 pointerProperties.clear();
100 pointerProperties.id = 0;
101 pointerProperties.toolType = AMOTION_EVENT_TOOL_TYPE_UNKNOWN;
102
+ ALOGI("RotaryEncoderInputMapper::sync");
// scroll 返回的是0,导致下面notifyMotion走不到。需要在getRelativeVWheel函数里适配
103 float scroll = mRotaryEncoderScrollAccumulator.getRelativeVWheel();
104 bool scrolled = scroll != 0;
105
106 // This is not a pointer, so it's not associated with a display.
107 int32_t displayId = ADISPLAY_ID_NONE;
108
109 // Moving the rotary encoder should wake the device (if specified).
110 uint32_t policyFlags = 0;
111 if (scrolled && getDeviceContext().isExternal()) {
112 policyFlags |= POLICY_FLAG_WAKE;
113 }
114
115 if (mOrientation == DISPLAY_ORIENTATION_180) {
116 scroll = -scroll;
117 }
118
119 // Send motion event.
120 if (scrolled) {
121 int32_t metaState = getContext()->getGlobalMetaState();
122 pointerCoords.setAxisValue(AMOTION_EVENT_AXIS_SCROLL, scroll * mScalingFactor);
// 添加x的值,否则,无论正向旋转还是反向旋转,x值都是0,导致应用App无法识别方向
+ pointerCoords.setAxisValue(AMOTION_EVENT_AXIS_X, scroll);
123
124 NotifyMotionArgs scrollArgs(getContext()->getNextId(), when, readTime, getDeviceId(),
125 mSource, displayId, policyFlags, AMOTION_EVENT_ACTION_SCROLL, 0,
126 0, metaState, /* buttonState */ 0, MotionClassification::NONE,
127 AMOTION_EVENT_EDGE_FLAG_NONE, 1, &pointerProperties,
128 &pointerCoords, 0, 0, AMOTION_EVENT_INVALID_CURSOR_POSITION,
129 AMOTION_EVENT_INVALID_CURSOR_POSITION, 0, /* videoFrames */ {});
130 getListener()->notifyMotion(&scrollArgs);
+ ALOGI("RotaryEncoderInputMapper::sync notifyMotion");
131 }
132
133 mRotaryEncoderScrollAccumulator.finishSync();
134 }
42 void CursorScrollAccumulator::process(const RawEvent* rawEvent) {
43 if (rawEvent->type == EV_REL) {
44 switch (rawEvent->code) {
45 case REL_WHEEL:
46 mRelWheel = rawEvent->value;
47 break;
48 case REL_HWHEEL:
49 mRelHWheel = rawEvent->value;
50 break;
+ case REL_X: // 由于自己的旋转编码器报的事件是REL_X,所以,需要添加该类型解析
+ mRelWheel = rawEvent->value;
+ break;
51 }
52 }
53 }
log:
旋转编码器正向旋转:x=1.000000 SOURCE_ROTARY_ENCODER = 0x00400000 <==> source=0x400000
04-07 05:47:32.041 575 667 D InputDispatcher: notifyMotion - id=b0eb158 eventTime=1947954629000, deviceId=4, source=0x400000, displayId=-1, policyFlags=0x0, action=0x8, actionButton=0x0, flags=0x0, metaState=0x0, buttonState=0x0, edgeFlags=0x0, xPrecision=0.000000, yPrecision=0.000000, xCursorPosition=nan, yCursorPosition=nan, downTime=0
04-07 05:47:32.041 575 667 D InputDispatcher: Pointer 0: id=0, toolType=0, x=1.000000, y=0.000000, pressure=0.000000, size=0.000000, touchMajor=0.000000, touchMinor=0.000000, toolMajor=0.000000, toolMinor=0.000000, orientation=0.000000
04-07 05:47:32.041 575 666 D InputDispatcher: dispatchMotion - eventTime=1947954629000, deviceId=4, source=0x400000, displayId=-1, policyFlags=0x62000000, action=0x8, actionButton=0x0, flags=0x0, metaState=0x0, buttonState=0x0,edgeFlags=0x0, xPrecision=0.000000, yPrecision=0.000000, downTime=0
04-07 05:47:32.041 575 666 D InputDispatcher: Pointer 0: id=0, toolType=0, x=1.000000, y=0.000000, pressure=0.000000, size=0.000000, touchMajor=0.000000, touchMinor=0.000000, toolMajor=0.000000, toolMinor=0.000000, orientation=0.000000
旋转编码器反向旋转:x=-1.000000 SOURCE_ROTARY_ENCODER = 0x00400000 <==> source=0x400000
04-07 05:47:35.923 575 667 I InputReader: lqy111 RotaryEncoderInputMapper::sync
04-07 05:47:35.923 575 667 I InputReader: lqy111 RotaryEncoderInputMapper::sync: scroll:-1.000000
04-07 05:47:35.923 575 667 I InputReader: lqy111 RotaryEncoderInputMapper::sync notifyMotion
04-07 05:47:35.923 575 667 D InputDispatcher: notifyMotion - id=45c55f eventTime=1951836828000, deviceId=4, source=0x400000, displayId=-1, policyFlags=0x0, action=0x8, actionButton=0x0, flags=0x0, metaState=0x0, buttonState=0x0, edgeFlags=0x0, xPrecision=0.000000, yPrecision=0.000000, xCursorPosition=nan, yCursorPosition=nan, downTime=0
04-07 05:47:35.923 575 667 D InputDispatcher: Pointer 0: id=0, toolType=0, x=-1.000000, y=0.000000, pressure=0.000000, size=0.000000, touchMajor=0.000000, touchMinor=0.000000, toolMajor=0.000000, toolMinor=0.000000, orientation=0.000000
04-07 05:47:35.923 575 666 D InputDispatcher: dispatchMotion - eventTime=1951836828000, deviceId=4, source=0x400000, displayId=-1, policyFlags=0x62000000, action=0x8, actionButton=0x0, flags=0x0, metaState=0x0, buttonState=0x0,edgeFlags=0x0, xPrecision=0.000000, yPrecision=0.000000, downTime=0
04-07 05:47:35.923 575 666 D InputDispatcher: Pointer 0: id=0, toolType=0, x=-1.000000, y=0.000000, pressure=0.000000, size=0.000000, touchMajor=0.000000, touchMinor=0.000000, toolMajor=0.000000, toolMinor=0.000000, orientation=0.000000
core/java/android/view/InputDevice.java: public static final int SOURCE_ROTARY_ENCODER = 0x00400000 | SOURCE_CLASS_NONE; <==> source=0x400000
App层监听旋转输入事件
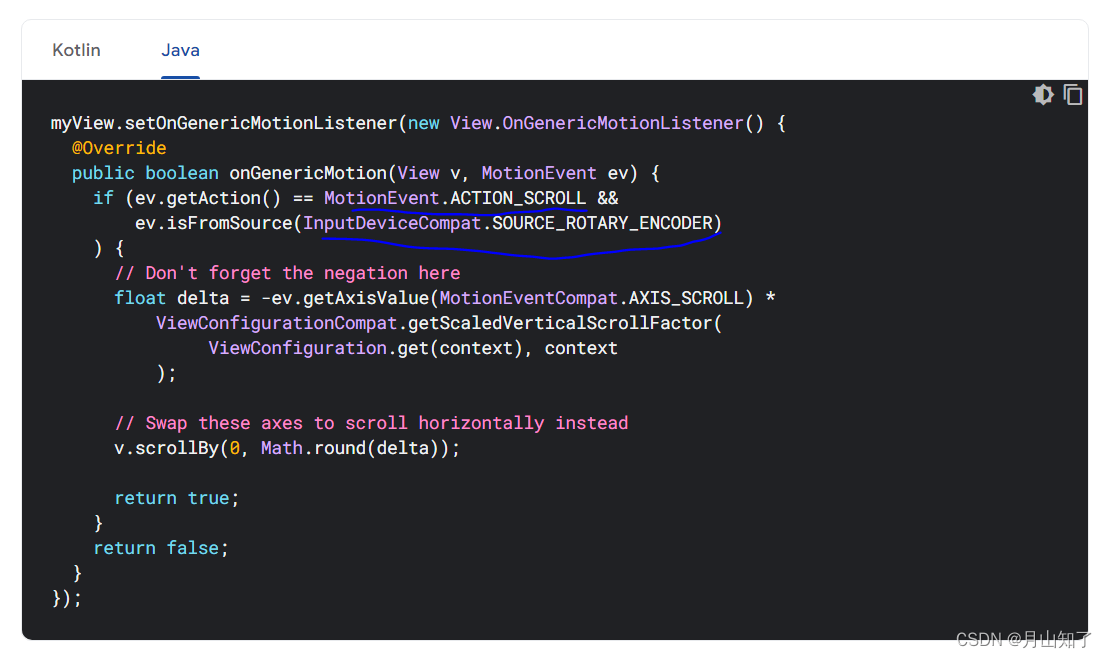
App层监听旋转输入事件:
developer.android.google.cn/training/wearables/user-input/rotary-input
myView.setOnGenericMotionListener
onGenercMotion
或者 在Activity也可以。
framework层监听旋转输入事件:
在NativeInputManager::interceptMotionBeforeQueueing()添加适配代码。
com_android_server_input_InputManagerService.cpp
void NativeInputManager::interceptMotionBeforeQueueing(const int32_t displayId, nsecs_t when,
uint32_t& policyFlags) {
调试总结
make libinputreader -j3
make libinputflinger -j3 && make libinputflinger_base -j3
while true; do echo "######$(date)######";adb logcat -b all | grep -i -E "EventHub|InputDispatcher|InputReader|WindowManager"; done
adb shell getevent
adb shell getevent -l
adb shell getevent -lip
adb shell dumpsys input