2.18 US-016电压式超声波测距传感器
US-016是市场上唯有的一款模拟量输出的超声波测距模块,输出的模拟电压和距离值成正比,可以方便的和其他系统相连,US-016工作稳定可靠。
US-016超声波测距模块可实现2cm~3m的非接触测距功能,供电电压为5V,工作电流为3.8mA,支持模拟电压输出,工作稳定可靠。本模块根据不同应用场景可设置成不同的量程(大测量距离分别为1m和3m);当Range管脚悬空时,量程为3m。US-016能将测量距离转化为模拟电压输出,输出电压值与测量距离成正比。
2.18.1 模块来源
采购链接:
US-016 模拟电压输出 双量程 模拟量 超声波测距模块 高精度
资料下载链接:
http://pan.baidu.com/s/1c08JuBQ
2.18.2 规格参数
工作电压:3.3V-5V
工作电流:3.8MA
感应角度:小于15度
探测距离:2CM-300CM
探测精度:0.3CM+1%
输出方式: 模拟电压
管脚数量:4 Pin
工作电流:3.8MA
感应角度:小于15度
探测距离:2CM-300CM
探测精度:0.3CM+1%
输出方式: 模拟电压
管脚数量:4 Pin
2.18.3 移植过程
我们的目标是在梁山派GD32F470上能够判断前方障碍物距离的功能。首先要获取资料,查看数据手册应如何实现,再移植至我们的工程。
2.18.3.1 查看资料
模块上电后,系统首先判断 Range 引脚的输入电平,根据输入电平状态来设置不同的量程。当 Range 引脚为高电平时,量程为 3m,当 Range 管脚为低电平时,量程为 1m。然后,系统开始连续测距,同时将测距结果通过模拟电压在 Out 管脚输出。当距离变化时,模拟电压也会随之进行变化。模拟电压与测量距离成正比,模拟电压的输出范围是0~Vcc。
- 当系统量程为 1m 时,测量距离为:L = 1024*Vout/Vcc(mm)。当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 1.024m。
- 当系统量程为 3m 时,测量距离为:L = 3096*Vout/Vcc(mm)。 当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 3.072m。
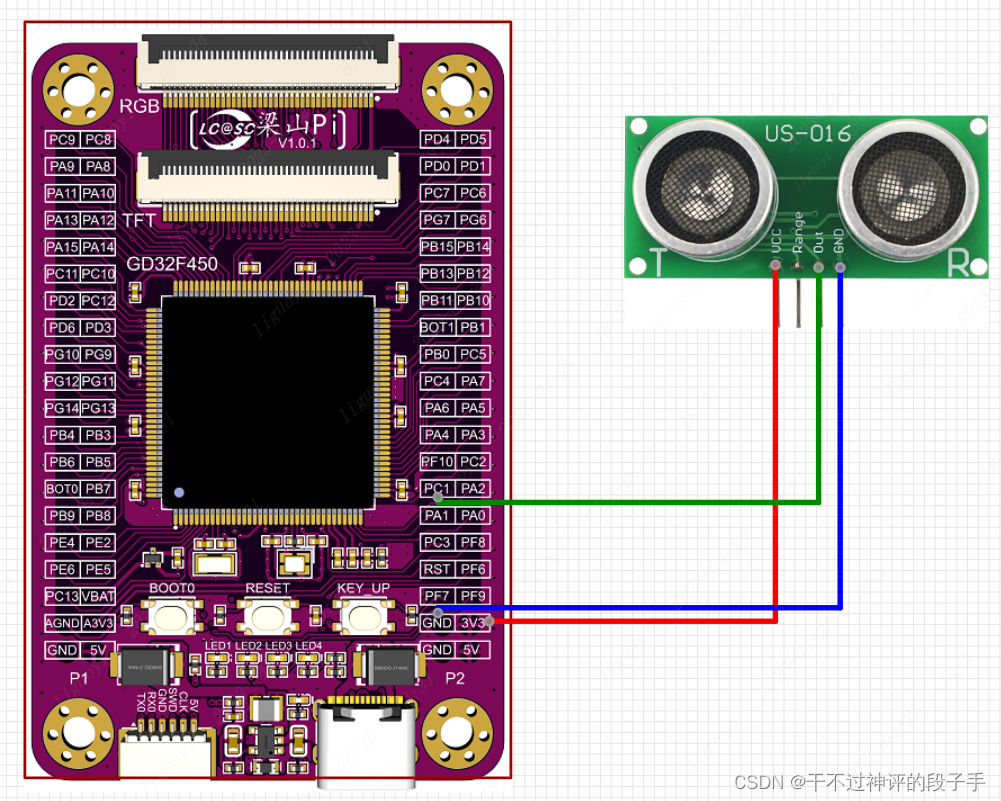
2.18.3.2 引脚选择
| 超声波模块 | 立创·梁山派 |
|---|---|
| VCC | 3V3 |
| range | 浮空 |
| out | PC1 |
| GND | GND |
2.18.3.3 移植至工程
移植步骤中的导入.c和.h文件与上一节相同,只是将.c和.h文件更改为bsp_US016.c与bsp_US016.h。见2.2.3.3 移植至工程。这里不再过多讲述。移植完成后面修改相关代码。
在文件bsp_US016.c中,编写如下代码。
/********************************************************************************
* 文 件 名: bsp_US016.c
* 版 本 号: 初版
* 修改作者: LC
* 修改日期: 2023年04月06日
* 功能介绍:
******************************************************************************
* 注意事项:
*********************************************************************************/
#include "bsp_US016.h"
#include "systick.h"
#include "bsp_usart.h"
#include "stdio.h"
//超声波量程 Range接地量程为1 Range接VCC量程为3 浮空量程为3
//测试时,Range浮空,故量程为3
#define RANGE 0 //=0则量程为3米 =1则量程为1米
/******************************************************************
* 函 数 名 称:US016_GPIO_Init
* 函 数 说 明:US016超声波模块引脚初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:
******************************************************************/
void US016_GPIO_Init(void)
{
/* 开启时钟 */
rcu_periph_clock_enable(RCU_OUT);
/* 使能ADC时钟 */
rcu_periph_clock_enable(RCU_OUT_ADC);
/* 配置AO为浮空模拟输入模式 */
gpio_mode_set(PORT_OUT, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, GPIO_OUT);
/* 配置ADC为独立模式 */
adc_sync_mode_config(ADC_SYNC_MODE_INDEPENDENT);
/* 使能连续转换模式 */
adc_special_function_config(PORT_OUT_ADC, ADC_CONTINUOUS_MODE, ENABLE);
/* 使能扫描模式 */
adc_special_function_config(PORT_OUT_ADC, ADC_SCAN_MODE, ENABLE);
/* 数据右对齐 */
adc_data_alignment_config(PORT_OUT_ADC, ADC_DATAALIGN_RIGHT);
/* ADC0设置为规则组 一共使用 CHANNEL_NUM 个通道 */
adc_channel_length_config(PORT_OUT_ADC, ADC_REGULAR_CHANNEL, CHANNEL_NUM);
/* ADC规则通道配置:ADC0的通道CHANNEL_ADC的扫描顺序为0;采样时间:15个周期 */
/* DMA开启之后 gt_adc_val[x][0] = PC1的数据 */
adc_regular_channel_config(PORT_OUT_ADC, 0, CHANNEL_OUT_ADC, ADC_SAMPLETIME_15);
/* ADC0设置为12位分辨率 */
adc_resolution_config(PORT_OUT_ADC, ADC_RESOLUTION_12B);
/* ADC外部触发禁用, 即只能使用软件触发 */
adc_external_trigger_config(PORT_OUT_ADC, ADC_REGULAR_CHANNEL, EXTERNAL_TRIGGER_DISABLE);
/* ADC0使能 */
adc_enable(PORT_OUT_ADC);
/* 等待ADC稳定 */
delay_1ms(1);
/* 开启ADC自校准 */
adc_calibration_enable(PORT_OUT_ADC);
/* 开启软件触发ADC转换 */
adc_software_trigger_enable(PORT_OUT_ADC, ADC_REGULAR_CHANNEL);
}
/******************************************************************
* 函 数 名 称:Get_ADC_Value
* 函 数 说 明:对ADC值进行平均值计算后输出
* 函 数 形 参:num采集次数
* 函 数 返 回:对应扫描的ADC值
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned int Get_ADC_Value(unsigned int num)
{
unsigned int Data=0;
int i = 0;
for( i = 0; i < num; i++ )
{
/* 读取ADC常规组数据寄存器 */
Data += adc_regular_data_read(ADC0);
delay_1ms(1);
}
Data = Data/num;
return Data;
}
/******************************************************************
* 函 数 名 称:Get_distance
* 函 数 说 明:读取测距距离
* 函 数 形 参:无
* 函 数 返 回:浮点型的测距的距离
* 作 者:LC
* 备 注:
量程为3米时距离公式为:L = (A*3072/4096)*(Vref/Vcc)
量程为1米时距离公式为:L = (A*1024/4096)*(Vref/Vcc)
Vref 为 ADC 的参考电压,Vcc 为 US-016 的电源电压
******************************************************************/
float Get_distance(void)
{
float distance = 0;
unsigned int d = Get_ADC_Value(30);
#if !RANGE
distance = d * 0.75;
#else
distance = d * 0.25;
#endif
return distance;
}
在文件bsp_US016.h中,编写如下代码。
#ifndef _BSP_US016_H_
#define _BSP_US016_H_
#include "gd32f4xx.h"
#define RCU_OUT RCU_GPIOC
#define PORT_OUT GPIOC
#define GPIO_OUT GPIO_PIN_1
#define RCU_OUT_ADC RCU_ADC0
#define PORT_OUT_ADC ADC0
#define CHANNEL_OUT_ADC ADC_CHANNEL_11
//采样通道数
#define CHANNEL_NUM 1
void US016_GPIO_Init(void);
float Get_distance(void);
#endif
移植现象:距离20CM处摆放障碍物,输出换算后的实际距离。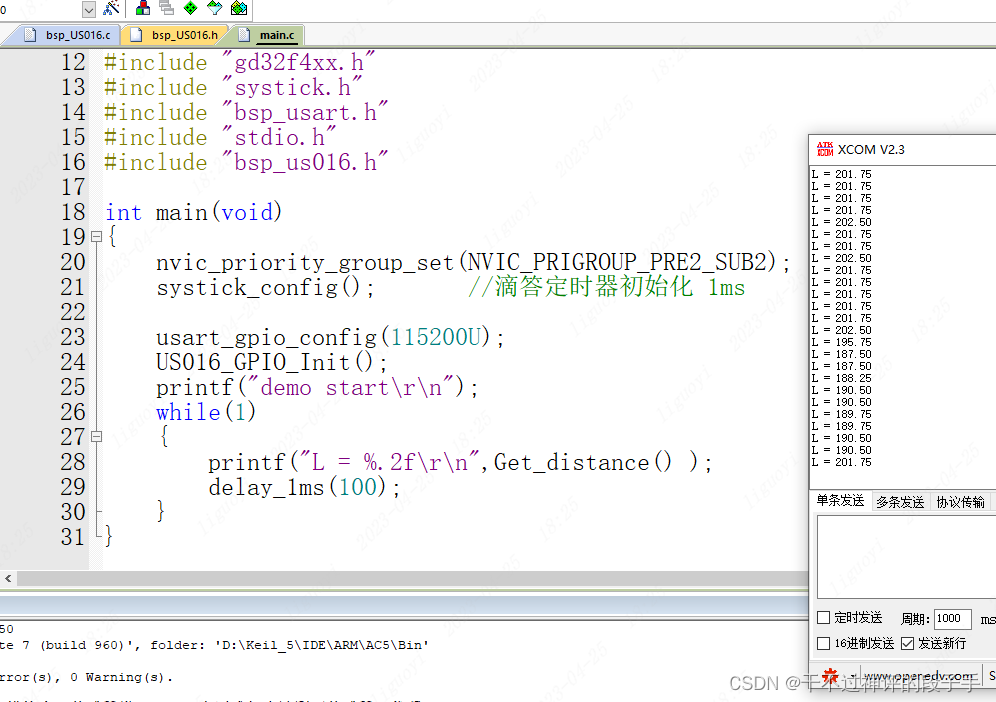
移植成功示例,见文件2.18.4-1 。