内容:SystemC入门书中的简单测试平台编写示例。
模块文件编写
带锁存输出的4选1多路器模型。输出在信号clock的正跳变沿时刻被锁存。
sync_mux41.h文件
#include <systemc.h>
SC_MODULE(sync_mux41)
{
sc_in<bool> clock, reset;
sc_in<sc_uint<2>> sel;
sc_in<sc_uint<4>> inp;
sc_out<bool> out;
void prc_sync_mux41();
SC_CTOR(sync_mux41)
{
SC_METHOD(prc_sync_mux41);
sensitive << clock.pos();
sensitive << reset.neg();
}
};
void sync_mux41::prc_sync_mux41()
{
sc_uint<4> temp_inp;
temp_inp =inp.read();
if(reset ==0)
{
out =0;
}
else
{
if(sel.read()==0)
{
out = temp_inp[0];
}
else if(sel.read()==1)
{
out = temp_inp[1];
}
else if(sel.read()==2)
{
out = temp_inp[2];
}
else
{
out = temp_inp[3];
}
}
}测试平台搭建
driver生成所有的可能的输入模式,每隔3ns向多路器施加其中一组输入模式。
sync_mux41_driver.h文件
#include <systemc.h>
SC_MODULE(driver)
{
sc_out<bool> d_reset;
sc_out<sc_uint<2> > d_sel;
sc_out<sc_uint<4> > d_inp;
void prc_driver();
SC_CTOR(driver)
{
SC_THREAD(prc_driver);
}
};
void driver::prc_driver()
{
d_reset =0;
wait(7, SC_NS);
d_reset =1;
for(int i=0; i<=15; i++)
{
d_inp =i;
for(int j=0; j<=3; j++)
{
d_sel = j;
wait(3, SC_NS);
}
}
}只要多路器输入和输出端口的值发生任何改变,模块monitor将打印出所有输入端口和输出端口的值。
sync_mux41_monitor.h文件
#include <systemc.h>
SC_MODULE(monitor)
{
sc_in<bool> m_clock, m_reset;
sc_in<sc_uint <2> > m_sel;
sc_in<sc_uint <4> > m_inp;
sc_in<bool> m_out;
void prc_monitor();
SC_CTOR(monitor)
{
SC_METHOD(prc_monitor);
sensitive << m_clock << m_reset << m_sel << m_inp << m_out;
}
};
void monitor::prc_monitor()
{
cout<<"At time "<<sc_simulation_time()<<"::";
cout<<"(clock, reset, sel, inp): ";
cout<<m_clock.read()<<","<<m_reset.read()<<","<<m_sel.read()<<","<<m_inp.read();
cout<<" out:"<<m_out.read()<<"\n";
}sc_main生成用vcd格式的仿真波形记录文件,让仿真连续运行100ns。
sync_mux41_main.cpp文件
#include "sync_mux41_driver.h"
#include "sync_mux41_monitor.h"
#include "sync_mux41.h"
const int CLOCK_PERIOD =2;
int sc_main(int argc, char* argv[])
{
sc_signal<bool> t_reset;
sc_signal<sc_uint<4> > t_inp;
sc_signal<sc_uint<2> > t_sel;
sc_signal<bool> t_out;
sc_clock t_clock("clock", CLOCK_PERIOD);
sync_mux41 m1("SyncMuxer4x1");
m1(t_clock, t_reset, t_sel, t_inp, t_out);
driver d1("GenerateWaveforms");
d1(t_reset, t_sel, t_inp);
monitor mo1("MonitorWaveforms");
mo1(t_clock, t_reset, t_sel, t_inp, t_out);
sc_trace_file *tf =sc_create_vcd_trace_file("sync_mux41");
sc_trace(tf, t_clock, "clock");
sc_trace(tf, t_reset, "reset");
sc_trace(tf, t_inp, "input");
sc_trace(tf, t_sel, "select");
sc_trace(tf, t_out, "output");
sc_start(100, SC_NS);
sc_close_vcd_trace_file(tf);
return 0;
}测试平台输出:
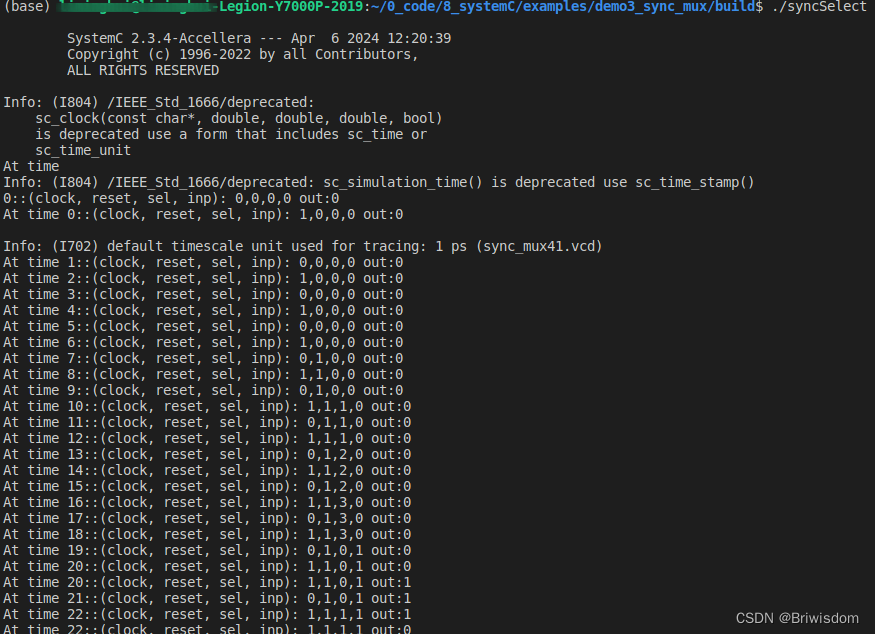
——实操演示](https://img-blog.csdnimg.cn/direct/742f58c929d8415cb9830b0c829944e4.png)