系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
- 系列文章目录
- 前言
- 一、多机器人集群编队策略
- 1、多机器人协同作业冲突问题
- (1)介绍
- (2)多机器人系统的优点
- (3)冲突的定义
- (4)冲突的类型
- (5)冲突解决策略
- (6)多机协同作业的核心技术
- 二、相关案例
- 多机器人决策规划–tuw_multi_robot
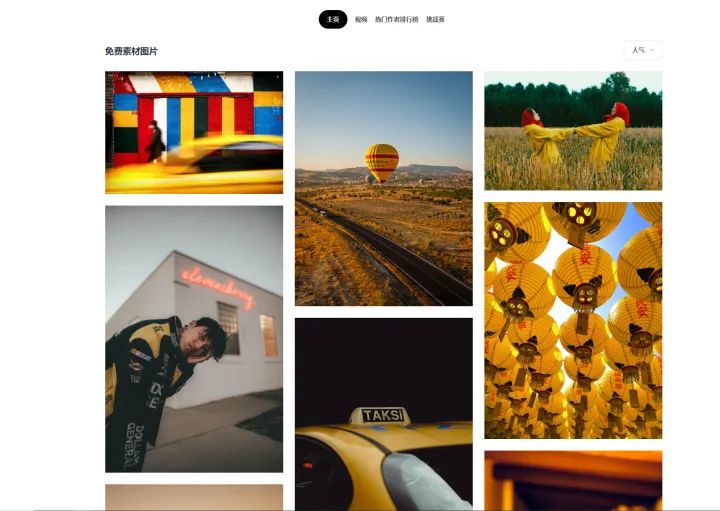
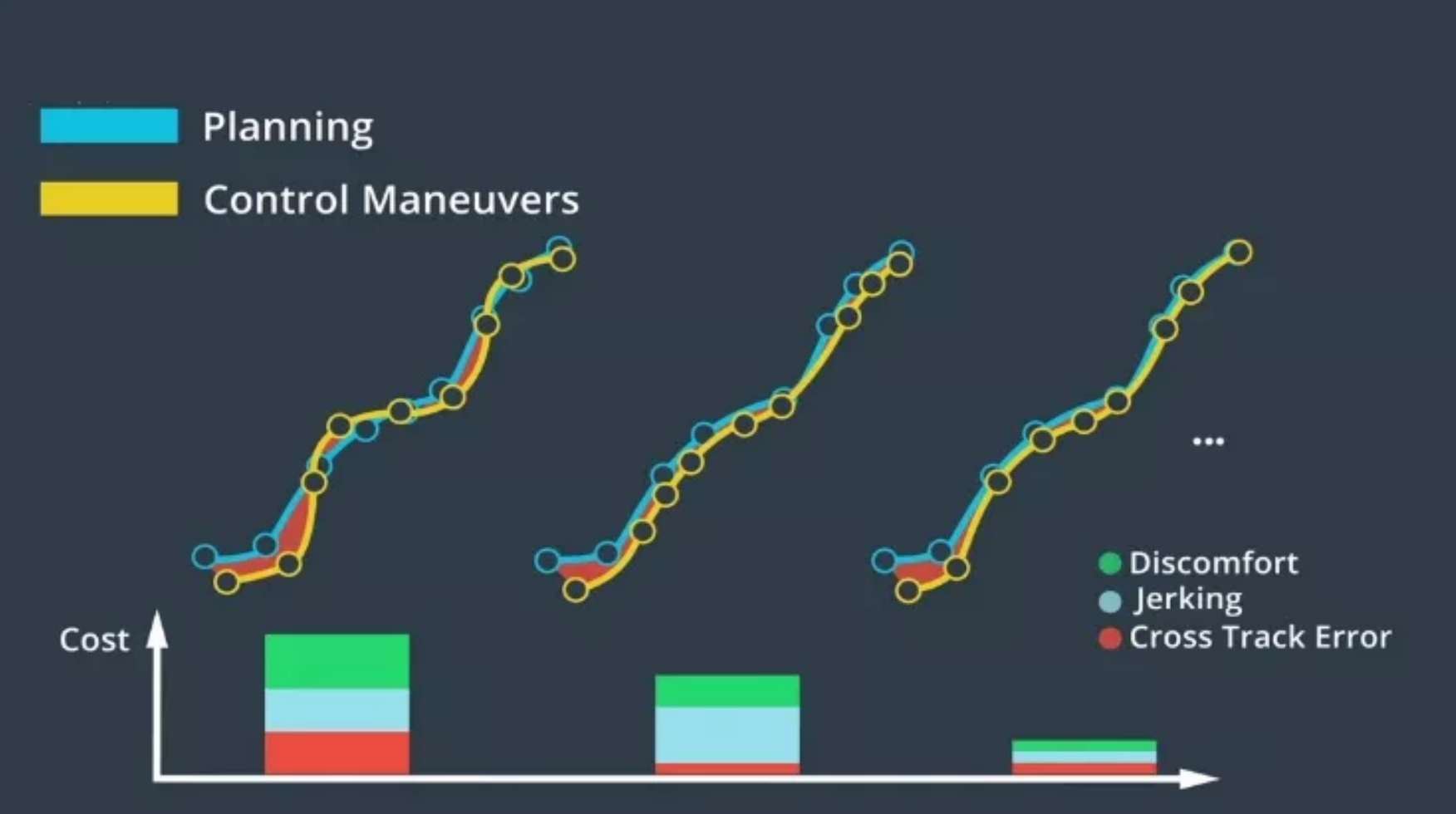
- 多机器人规划 EGO-Swarm算法
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对多机器人集群编队策略做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、多机器人集群编队策略
1、多机器人协同作业冲突问题
(1)介绍
多机器人系统就是当工作较为复杂时,单个机器人不能胜任此工作,多个机器人一同来完成,机器人各司其职、团结协作共同完成某一项任务。多机器人系统因拥有更高的灵活性和更快的工作效率,【防盗标记–盒子君hzj】可以完成更为复杂的工作,因而得到了极大的发展。多机器人协同作业的核心技术在于:解决机器人之间的冲突和对抗。最大程度的发挥整体系统的潜能,处理更加复杂的动态任务
(2)多机器人系统的优点
1)具备时间、空间、功能、信息和资源上的分布性。即多个机器人可以在工作空间不同的区域同时工作;在同一时间可执行不同的任务。
2)具有较好的鲁棒性。当机器人系统中的某一个体发生故障时,该系统仍可以完成预先分配的任务。
3)具有较高的工作效率和柔性,更适合于先进制造在柔性、【防盗标记–盒子君hzj】智能化及网络化等方面的要求。
4)具有较好的灵活性。
5)降低系统造价与复杂度。多机器人系统可以对某一项任务提供多种解决方案,针对需求,选择合适的方案
(3)冲突的定义
对于单机器人而言,在沿着路径规划运动时仅需考虑避开障碍物,不会发生机器人运行中的碰撞冲突等问题,所以无需考虑如何避开其他移动机器人的问题。但是对于多个机器人来说,运行系统较为复杂,调度不合理或有意外情况发生时都将会导致机器人发生碰撞或者冲突严重的将会导致系统瘫痪
冲突是指机器人沿着路径规划运动时,由于空间和时间的缘故存在路径交叉的现象。【防盗标记–盒子君hzj】冲突具体表现为在同一个空间中两个机器人在同一时刻同一地点存在相遇或有相遇趋势的情况,导致死锁现象.
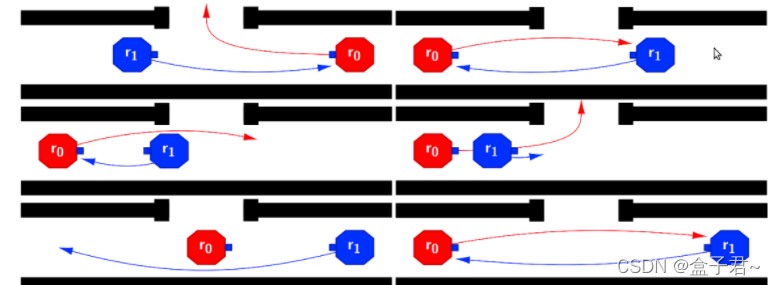
(4)冲突的类型
(1)相向相遇冲突
(2)相向相遇冲突
(3)占位冲突
(4)占位冲突
(5)占位冲突
(5)冲突解决策略
1)预测方法
即提前推测机器人在运行过程中可能遇到的障碍物,【防盗标记–盒子君hzj】并根据障碍的类型采用相应的避障策略,该算法仅适应于静态环境,在复杂的环境中往往很难解决多机器人冲突问题;更不适应于动态环境
2)反应式方法
即机器人在运行过程中,系统根据当前机器人行驶的路径状态分段确定机器人的路径,实现避障。其特点是反应速度比较快
3)时间窗方法
可以准确的规划出每一个机器人的行驶路径,且该路径不存在碰撞与冲突的可能,对于新任务反应迅速,同时又减少了计算的复杂度。该方法的应用条件较为苛刻,必须在理想环境下进行。且该方法的使用会增加系统的复杂程度,降低工作效率
(6)多机协同作业的核心技术
1)平均分配任务量的同时为每台机具制定作业路线
当多个农机位于同一工作区域中,路径规划算法需要将整片区域均分,【防盗标记–盒子君hzj】然后规划路径,确保每台农机的工作量一致,提高多机协同的工作效率。
2)对机器人—机器人,机器人—障碍物的相对位置判定
在多机协同作业过程中,单台农机需要避开移动的其他农机以及静止的障碍物,因此在多机协同作业过程中单台工作农机需要获取其他物体的实时位置,实现动态避障。【防盗标记–盒子君hzj】实现上述目标需要的核心技术有实时信息传输,适于大田工作的通信方式以及集体智慧技术
.
.
.
二、相关案例
多机器人决策规划–tuw_multi_robot
参考资料
https://blog.csdn.net/Travis_X/article/details/111028583
多机器人规划 EGO-Swarm算法
参考链接
https://www.bilibili.com/video/BV1qv4y1K7Y6/?vd_source=d2e3d6e6471e9923bd624ca82425fdde




![[附源码]java毕业设计面向服装集群企业的个性化定制服务系统](https://img-blog.csdnimg.cn/a1737e89d8e046eb81d8270f720ec8f1.png)