梯度下降法面试题
1. 机器学习中为什么需要梯度下降
梯度下降的作用:
- 梯度下降是迭代法的一种,可以用于求解最小二乘问题。
- 在求解损失函数的最小值时,可以通过梯度下降法来一步步的迭代求解,得到最小化的损失函数和模型参数值。
- 如果我们需要求解损失函数的最大值,可通过梯度上升法来迭代。梯度下降法和梯度上升法可相互转换。
2. 梯度下降法缺点
缺点:
- 靠近极小值时收敛速度减慢。
- 直线搜索时可能会产生一些问题。
- 可能会“之字形”地下降。
注意:
- 梯度是一个向量,即有方向有大小。
- 梯度的方向是最大方向导数的方向。
- 梯度的值是最大方向导数的值。
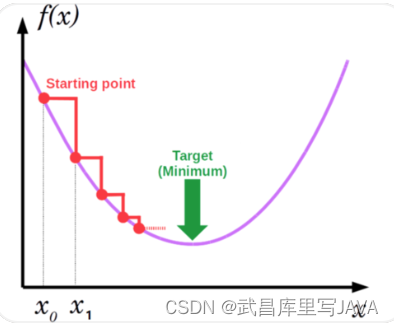
3. 梯度下降法直观理解
假如最开始,我们在一座大山上的某处位置,因为到处都是陌生的,不知道下山的路,所以只能摸索着根据直觉,走一步算一步,在此过程中,每走到一个位置的时候,都会求解当前位置的梯度,沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位置沿着最陡峭最易下山的位置走一步。不断循环求梯度,就这样一步步地走下去,一直走到我们觉得已经到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山势低处。
由此,从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部的最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
4. 梯度下降核心思想归纳
- 确定优化模型的假设函数及损失函数。
- 初始化参数,随机选取取值范围内的任意数;
- 迭代操作:
- 计算当前梯度
- 修改新的变量
- 计算朝最陡的下坡方向走一步
- 判断是否需要终止,如否,梯度更新
- 得到全局最优解或者接近全局最优解。
5. 如何对梯度下降法进行调优
实际使用梯度下降法时,各项参数指标不能一步就达到理想状态,对梯度下降法调优主要体现在以下几个方面:
(1)算法迭代步长
α
\alpha
α选择。
在算法参数初始化时,有时根据经验将步长初始化为1。实际取值取决于数据样本。可以从大到小,多取一些值,分别运行算法看迭代效果,如果损失函数在变小,则取值有效。如果取值无效,说明要增大步长。但步长太大,有时会导致迭代速度过快,错过最优解。步长太小,迭代速度慢,算法运行时间长。
(2)参数的初始值选择。
初始值不同,获得的最小值也有可能不同,梯度下降有可能得到的是局部最小值。如果损失函数是凸函数,则一定是最优解。由于有局部最优解的风险,需要多次用不同初始值运行算法,关键损失函数的最小值,选择损失函数最小化的初值。
(3)标准化处理。
由于样本不同,特征取值范围也不同,导致迭代速度慢。为了减少特征取值的影响,可对特征数据标准化,使新期望为0,新方差为1,可节省算法运行时间。
6. 随机梯度和批量梯度区别
随机梯度下降(SDG)和批量梯度下降(BDG)是两种主要梯度下降法,其目的是增加某些限制来加速运算求解。
下面通过介绍两种梯度下降法的求解思路,对其进行比较。
假设函数为:
h
θ
(
x
0
,
x
1
,
.
.
.
,
x
3
)
=
θ
0
x
0
+
θ
1
x
1
+
.
.
.
+
θ
n
x
n
h_\theta (x_0,x_1,...,x_3) = \theta_0 x_0 + \theta_1 x_1 + ... + \theta_n x_n
hθ(x0,x1,...,x3)=θ0x0+θ1x1+...+θnxn
损失函数为:
J
(
θ
0
,
θ
1
,
.
.
.
,
θ
n
)
=
1
2
m
∑
j
=
0
m
(
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
−
y
j
)
2
J(\theta_0, \theta_1, ... , \theta_n) = \frac{1}{2m} \sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)^2
J(θ0,θ1,...,θn)=2m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)2
其中,
m
m
m为样本个数,
j
j
j为参数个数。
1、 批量梯度下降的求解思路如下:
a) 得到每个
θ
\theta
θ对应的梯度:
∂
∂
θ
i
J
(
θ
0
,
θ
1
,
.
.
.
,
θ
n
)
=
1
m
∑
j
=
0
m
(
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
−
y
j
)
x
i
j
\frac{\partial}{\partial \theta_i}J({\theta}_0,{\theta}_1,...,{\theta}_n)=\frac{1}{m}\sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)x^{j}_i
∂θi∂J(θ0,θ1,...,θn)=m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)xij
b) 由于是求最小化风险函数,所以按每个参数
θ
\theta
θ 的梯度负方向更新 $ \theta_i $ :
θ
i
=
θ
i
−
1
m
∑
j
=
0
m
(
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
−
y
j
)
x
i
j
\theta_i=\theta_i - \frac{1}{m} \sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)x^{j}_i
θi=θi−m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)xij
c) 从上式可以注意到,它得到的虽然是一个全局最优解,但每迭代一步,都要用到训练集所有的数据,如果样本数据很大,这种方法迭代速度就很慢。
相比而言,随机梯度下降可避免这种问题。
2、随机梯度下降的求解思路如下:
a) 相比批量梯度下降对应所有的训练样本,随机梯度下降法中损失函数对应的是训练集中每个样本的粒度。
损失函数可以写成如下这种形式,
J
(
θ
0
,
θ
1
,
.
.
.
,
θ
n
)
=
1
m
∑
j
=
0
m
(
y
j
−
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
)
2
=
1
m
∑
j
=
0
m
c
o
s
t
(
θ
,
(
x
j
,
y
j
)
)
J(\theta_0, \theta_1, ... , \theta_n) = \frac{1}{m} \sum^{m}_{j=0}(y^j - h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n))^2 = \frac{1}{m} \sum^{m}_{j=0} cost(\theta,(x^j,y^j))
J(θ0,θ1,...,θn)=m1j=0∑m(yj−hθ(x0j,x1j,...,xnj))2=m1j=0∑mcost(θ,(xj,yj))
b)对每个参数 $ \theta$ 按梯度方向更新 $ \theta$:
θ
i
=
θ
i
+
(
y
j
−
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
)
\theta_i = \theta_i + (y^j - h_\theta (x^{j}_0, x^{j}_1, ... ,x^{j}_n))
θi=θi+(yj−hθ(x0j,x1j,...,xnj))
c) 随机梯度下降是通过每个样本来迭代更新一次。
随机梯度下降伴随的一个问题是噪音较批量梯度下降要多,使得随机梯度下降并不是每次迭代都向着整体最优化方向。
小结:
随机梯度下降法、批量梯度下降法相对来说都比较极端,简单对比如下:
| 方法 | 特点 |
|---|---|
| 批量梯度下降 | a)采用所有数据来梯度下降。 b)批量梯度下降法在样本量很大的时候,训练速度慢。 |
| 随机梯度下降 | a)随机梯度下降用一个样本来梯度下降。 b)训练速度很快。 c)随机梯度下降法仅仅用一个样本决定梯度方向,导致解有可能不是全局最优。 d)收敛速度来说,随机梯度下降法一次迭代一个样本,导致迭代方向变化很大,不能很快的收敛到局部最优解。 |
下面介绍能结合两种方法优点的小批量梯度下降法。
3、 小批量(Mini-Batch)梯度下降的求解思路如下
对于总数为
m
m
m个样本的数据,根据样本的数据,选取其中的
n
(
1
<
n
<
m
)
n(1< n< m)
n(1<n<m)个子样本来迭代。其参数
θ
\theta
θ按梯度方向更新
θ
i
\theta_i
θi公式如下:
θ
i
=
θ
i
−
α
∑
j
=
t
t
+
n
−
1
(
h
θ
(
x
0
j
,
x
1
j
,
.
.
.
,
x
n
j
)
−
y
j
)
x
i
j
\theta_i = \theta_i - \alpha \sum^{t+n-1}_{j=t} ( h_\theta (x^{j}_{0}, x^{j}_{1}, ... , x^{j}_{n} ) - y^j ) x^{j}_{i}
θi=θi−αj=t∑t+n−1(hθ(x0j,x1j,...,xnj)−yj)xij
7. 各种梯度下降法性能比较
下表简单对比随机梯度下降(SGD)、批量梯度下降(BGD)、小批量梯度下降(Mini-batch GD)、和Online GD的区别:
| BGD | SGD | Mini-batch GD | Online GD | |
|---|---|---|---|---|
| 训练集 | 固定 | 固定 | 固定 | 实时更新 |
| 单次迭代样本数 | 整个训练集 | 单个样本 | 训练集的子集 | 根据具体算法定 |
| 算法复杂度 | 高 | 低 | 一般 | 低 |
| 时效性 | 低 | 一般 | 一般 | 高 |
| 收敛性 | 稳定 | 不稳定 | 较稳定 | 不稳定 |
Online GD于Mini-batch GD/SGD的区别在于,所有训练数据只用一次,然后丢弃。这样做的优点在于可预测最终模型的变化趋势。
Online GD在互联网领域用的较多,比如搜索广告的点击率(CTR)预估模型,网民的点击行为会随着时间改变。用普通的BGD算法(每天更新一次)一方面耗时较长(需要对所有历史数据重新训练);另一方面,无法及时反馈用户的点击行为迁移。而Online GD算法可以实时的依据网民的点击行为进行迁移。
8. 推导多元函数梯度下降法的迭代公式。
根据多元函数泰勒公式,如果忽略一次以上的项,函数在
x
\mathbf{x}
x点处可以展开为
f
(
x
+
Δ
x
)
=
f
(
x
)
+
(
∇
f
(
x
)
)
T
Δ
x
+
o
(
∥
Δ
x
∥
)
f(\mathbf{x}+\Delta \mathbf{x})=f(\mathbf{x})+(\nabla f(\mathbf{x}))^{\mathrm{T}} \Delta \mathbf{x}+o(\|\mathbf{\Delta} \mathbf{x}\|)
f(x+Δx)=f(x)+(∇f(x))TΔx+o(∥Δx∥)
对上式变形,函数的增量与自变量增量、函数梯度的关系为
f
(
x
+
Δ
x
)
−
f
(
x
)
=
(
∇
f
(
x
)
)
T
Δ
x
+
o
(
∥
Δ
x
∥
)
f(\mathbf{x}+\Delta \mathbf{x})-f(\mathbf{x})=(\nabla f(\mathbf{x}))^{\mathrm{T}} \Delta \mathbf{x}+o(\|\Delta \mathbf{x}\|)
f(x+Δx)−f(x)=(∇f(x))TΔx+o(∥Δx∥)
如果令
Δ
x
=
−
∇
f
(
x
)
\Delta \mathbf{x}=-\nabla f(\mathbf{x})
Δx=−∇f(x)则有
f
(
x
+
Δ
x
)
−
f
(
x
)
≈
−
(
∇
f
(
x
)
)
T
∇
f
(
x
)
≤
0
f(\mathbf{x}+\Delta \mathbf{x})-f(\mathbf{x}) \approx-(\nabla f(\mathbf{x}))^{\mathrm{T}} \nabla f(\mathbf{x}) \leq 0
f(x+Δx)−f(x)≈−(∇f(x))T∇f(x)≤0
即函数值减小。即有
f
(
x
+
Δ
x
)
≤
f
(
x
)
f(\mathbf{x}+\Delta \mathbf{x}) \leq f(\mathbf{x})
f(x+Δx)≤f(x)
梯度下降法每次的迭代增量为
Δ
x
=
−
α
∇
f
(
x
)
\Delta \mathbf{x}=-\alpha \nabla f(\mathbf{x})
Δx=−α∇f(x)
其中
α
\alpha
α为人工设定的接近于的正数,称为步长或学习率。其作用是保证
x
+
Δ
x
\mathbf{x}+\Delta \mathbf{x}
x+Δx在
x
\mathbf{x}
x的
邻域内,从而可以忽略泰勒公式中的
o
(
∥
Δ
x
∥
)
o(\|\Delta \mathbf{x}\|)
o(∥Δx∥)项。
使用该增量则有
(
∇
f
(
x
)
)
T
Δ
x
=
−
α
(
∇
f
(
x
)
)
T
(
∇
f
(
x
)
)
≤
0
(\nabla f(\mathbf{x}))^{\mathrm{T}} \Delta \mathbf{x}=-\alpha(\nabla f(\mathbf{x}))^{\mathrm{T}}(\nabla f(\mathbf{x})) \leq 0
(∇f(x))TΔx=−α(∇f(x))T(∇f(x))≤0
函数值下降。从初始点
x
0
\mathbf{x}_{0}
x0开始,反复使用如下迭代公式
x
k
+
1
=
x
k
−
α
∇
f
(
x
k
)
\mathbf{x}_{k+1}=\mathbf{x}_{k}-\alpha \nabla f\left(\mathbf{x}_{k}\right)
xk+1=xk−α∇f(xk)
只要没有到达梯度为0的点,函数值会沿序列
x
k
\mathbf{x}_{k}
xk递减,最终收敛到梯度为0 的点。从
x
0
\mathbf{x}_{0}
x0
出发,用迭代公式进行迭代,会形成一个函数值递减的序列
{
x
i
}
\left\{\mathbf{x}_{i}\right\}
{xi}
f
(
x
0
)
≥
f
(
x
1
)
≥
f
(
x
2
)
≥
…
≥
f
(
x
k
)
f\left(\mathbf{x}_{0}\right) \geq f\left(\mathbf{x}_{1}\right) \geq f\left(\mathbf{x}_{2}\right) \geq \ldots \geq f\left(\mathbf{x}_{k}\right)
f(x0)≥f(x1)≥f(x2)≥…≥f(xk)
9. 梯度下降法如何判断是否收敛?
迭代终止的条件是函数的梯度值为0(实际实现时是接近于0 即可),此时认为已经达
到极值点。可以通过判定梯度的二范数是否充分接近于0 而实现。
10. 梯度下降法为什么要在迭代公式中使用步长系数?
其作用是保证
x
+
Δ
x
\mathbf{x}+\Delta \mathbf{x}
x+Δx在
x
\mathbf{x}
x的邻域内,即控制增量的步长,从而可以忽略泰勒公式中的
o
(
∥
Δ
x
∥
)
o(\|\Delta \mathbf{x}\|)
o(∥Δx∥)项。否则不能保证每次迭代时函数值下降。
11. 梯度下降法和牛顿法能保证找到函数的极小值点吗,为什么?
不能,可能收敛到鞍点,不是极值点。
12. 解释一元函数极值判别法则。
假设
x
0
x_0
x0为函数的驻点,可分为以下三种情况。
case1:在该点处的二阶导数大于0,则为函数的极小值点;
case2:在该点处的二阶导数小于0,则为极大值点;
case3:在该点处的二阶导数等于0,则情况不定,可能是极值点,也可能不是极值点。
13. 解释多元函数极值判别法则。
假设多元函数在点M的梯度为0 ,即M 是函数的驻点。其Hessian 矩阵有如下几种情
况。
case1:Hessian 矩阵正定,函数在该点有极小值。
case2:Hessian 矩阵负定,函数在该点有极大值。
case3:Hessian 矩阵不定,则不是极值点,称为鞍点。
Hessian 矩阵正定类似于一元函数的二阶导数大于0,负定则类似于一元函数的二阶导
数小于0。
14. 什么是鞍点?
Hessian 矩阵不定的点称为鞍点,它不是函数的极值点。
15. 解释什么是局部极小值,什么是全局极小值。
- 全局极小值
- 假设
x
∗
\mathbf{x}^{*}
x∗是一个可行解,如果对可行域内所有点
x
\mathbf{x}
x都有
f
(
x
∗
)
≤
f
(
x
)
f\left(\mathbf{x}^{*}\right) \leq f(\mathbf{x})
f(x∗)≤f(x),则
称 x ∗ \mathbf{x}^{*} x∗为全局极小值。
- 假设
x
∗
\mathbf{x}^{*}
x∗是一个可行解,如果对可行域内所有点
x
\mathbf{x}
x都有
f
(
x
∗
)
≤
f
(
x
)
f\left(\mathbf{x}^{*}\right) \leq f(\mathbf{x})
f(x∗)≤f(x),则
- 局部极小值
- 对于可行解
x
∗
\mathbf{x}^{*}
x∗,如果存在其
δ
\delta
δ邻域,使得该邻域内的所有点即所有满足
∥ x − x ∗ ∥ ≤ δ \left\|\mathbf{x}-\mathbf{x}^{*}\right\| \leq \delta ∥x−x∗∥≤δ的点 x \mathbf{x} x,都有 f ( x ∗ ) ≤ f ( x ) f\left(x^{*}\right) \leq f(x) f(x∗)≤f(x),则称 x ∗ \mathbf{x}^{*} x∗为局部极小值。
- 对于可行解
x
∗
\mathbf{x}^{*}
x∗,如果存在其
δ
\delta
δ邻域,使得该邻域内的所有点即所有满足
16. 推导多元函数牛顿法的迭代公式。
根据费马定理,函数在点 x \mathbf{x} x 处取得极值的必要条件是梯度为0
∇
f
(
x
)
=
0
\nabla f(\mathbf{x})=\mathbf{0}
∇f(x)=0
对于一般的函数,直接求解此方程组存在困难。对目标函数在
x
0
\mathbf{x}_{0}
x0 处作二阶泰勒展开
f
(
x
)
=
f
(
x
0
)
+
∇
f
(
x
0
)
T
(
x
−
x
0
)
+
1
2
(
x
−
x
0
)
T
∇
2
f
(
x
0
)
(
x
−
x
0
)
+
o
(
∥
k
−
x
0
∥
2
)
f(\mathbf{x})=f\left(\mathbf{x}_{0}\right)+\nabla f\left(\mathbf{x}_{0}\right)^{\mathrm{T}}\left(\mathbf{x}-\mathbf{x}_{0}\right)+\frac{1}{2}\left(\mathbf{x}-\mathbf{x}_{0}\right)^{\mathrm{T}} \nabla^{2} f\left(\mathbf{x}_{0}\right)\left(\mathbf{x}-\mathbf{x}_{0}\right)+o\left(\left\|\mathbf{k}-\mathbf{x}_{0}\right\|^{2}\right)
f(x)=f(x0)+∇f(x0)T(x−x0)+21(x−x0)T∇2f(x0)(x−x0)+o(∥k−x0∥2)
忽略二次以上的项,将目标函数近似成二次函数,等式两边同时对
x
\mathbf{x}
x求梯度,可得
∇
f
(
x
)
≈
∇
f
(
x
0
)
+
∇
2
f
(
x
0
)
(
x
−
x
0
)
\nabla f(\mathbf{x}) \approx \nabla f\left(\mathbf{x}_{0}\right)+\nabla^{2} f\left(\mathbf{x}_{0}\right)\left(\mathbf{x}-\mathbf{x}_{0}\right)
∇f(x)≈∇f(x0)+∇2f(x0)(x−x0)
其中
∇
2
f
(
x
0
)
\nabla^{2} f\left(\mathbf{x}_{0}\right)
∇2f(x0)为在
x
0
\mathbf{x}_{0}
x0 处的Hessian 矩阵。令函数的梯度为0 ,有
∇
f
(
x
0
)
+
∇
2
f
(
x
0
)
(
x
−
x
0
)
=
0
\nabla f\left(\mathbf{x}_{0}\right)+\nabla^{2} f\left(\mathbf{x}_{0}\right)\left(\mathbf{x}-\mathbf{x}_{0}\right)=\mathbf{0}
∇f(x0)+∇2f(x0)(x−x0)=0
解这个线性方程组可以得到
x
=
x
0
−
(
∇
2
f
(
x
0
)
)
−
1
∇
f
(
x
0
)
(1)
\tag{1}\mathbf{x}=\mathbf{x}_{0}-\left(\nabla^{2} f\left(\mathbf{x}_{0}\right)\right)^{-1} \nabla f\left(\mathbf{x}_{0}\right)
x=x0−(∇2f(x0))−1∇f(x0)(1)
如果将梯度向量简写为
g
\mathbf{g}
g ,Hessian 矩阵简记为
H
\mathbf{H}
H ,式(1)可以简写为
x
=
x
0
−
H
−
1
g
(2)
\tag{2}\mathbf{x}=\mathbf{x}_{0}-\mathbf{H}^{-1} \mathbf{g}
x=x0−H−1g(2)
在泰勒公式中忽略了高阶项将函数做了近似,因此这个解不一定是目标函数的驻点,需要反复用式(2) 进行迭代。从初始点
x
0
\mathbf{x}_{0}
x0处开始,计算函数在当前点处的Hessian 矩阵和梯度向量,然后用下面的公式进行迭代
x k + 1 = x k − α H k − 1 g k (3) \tag{3} \mathbf{x}_{k+1}=\mathbf{x}_{k}-\alpha \mathbf{H}_{k}^{-1} \mathbf{g}_{k} xk+1=xk−αHk−1gk(3)
直至收敛到驻点处。迭代终止的条件是梯度的模接近于0 ,或达到指定的迭代次数。其中 α \alpha α是人工设置的学习率。需要学习率的原因与梯度下降法相同,是为了保证能够忽略泰勒公式中的高阶无穷小项。