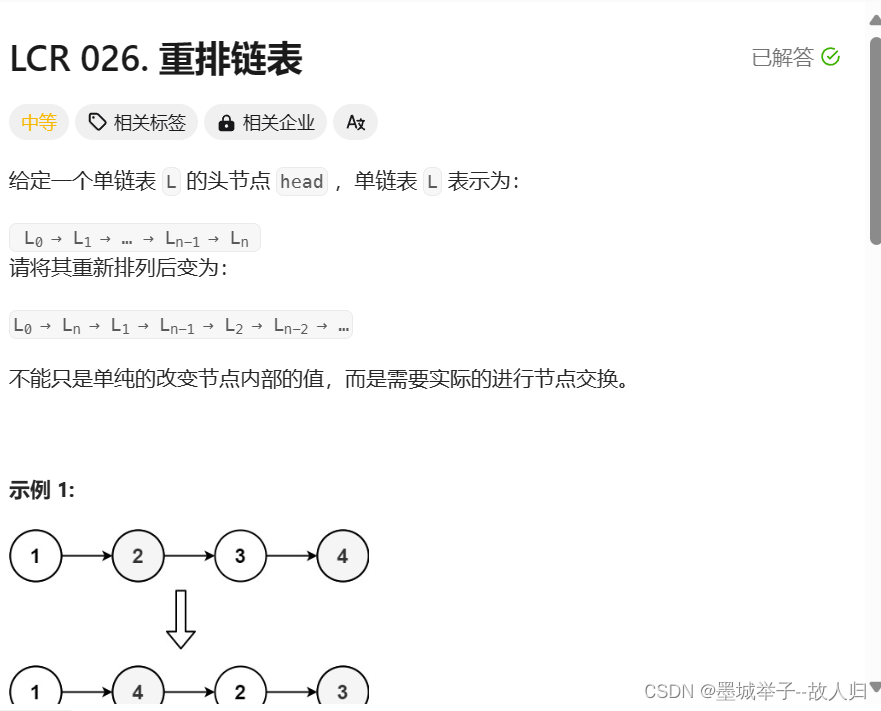
 首先通过快慢指针找到中间节点,然后将中间节点之后和之前的部分分为两个链表,然后翻转后面的链表,注意方法,然后将两个链表交替链接。
首先通过快慢指针找到中间节点,然后将中间节点之后和之前的部分分为两个链表,然后翻转后面的链表,注意方法,然后将两个链表交替链接。
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* ListNode *next;
* ListNode() : val(0), next(nullptr) {}
* ListNode(int x) : val(x), next(nullptr) {}
* ListNode(int x, ListNode *next) : val(x), next(next) {}
* };
*/
class Solution {
public:
void reorderList(ListNode* head) {
if(!head||!head->next)
return;
ListNode *fast=head,*low=head;
ListNode *pre=nullptr,*cur=nullptr,*next=nullptr;
while(fast->next!=nullptr){
fast=fast->next;
if(fast->next)
fast=fast->next;//如果不是最后一个就走两步
low=low->next;
}
//当快指针到头,慢指针位置就是链表中间位置,cur指向后半段第一个
cur=low->next;
//不断开前半段的指针,会报错内存异常
low->next=nullptr;
//翻转从cur到结尾的链表部分
while(cur){
next=cur->next;
cur->next=pre;
pre=cur;
cur=next;
}
//此时pre指向后半段翻转过的链表头,head是前半段的链表头
//将pre的链表插入到head的链表间隔中
cur=head;
while(cur&&pre){
ListNode *temp=pre->next;//保存pre的下一个
pre->next=cur->next;
cur->next=pre;
cur=pre->next;
pre=temp;
}
}
};










![[ROS 系列学习教程] rosbag C++ API](https://img-blog.csdnimg.cn/direct/5f927cceba4d474da5b8887bc77d34e4.png#pic_center)