一、准备工作
有关OLED屏初始化的问题,详见【STM32+HAL】OLED显示初始化配置
二、所用工具
1、芯片:STM32F10C8T6
2、CUBEMX配置软件
3、 6 轴运动处理组件MPU6050
三、实现功能
OLED屏显示姿态角
四、HAL配置步骤
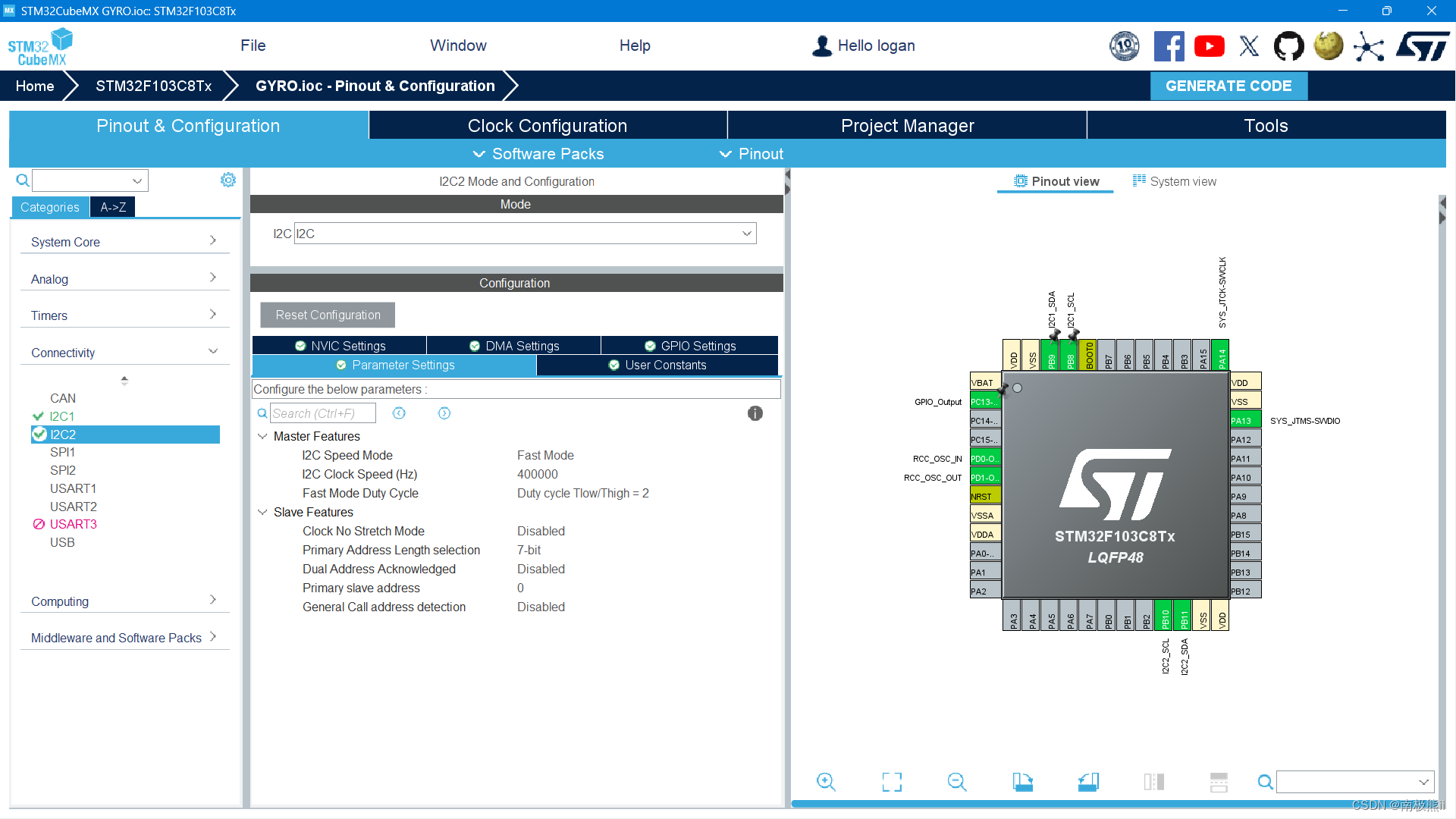
1、开启I2C1进行MPU6050通信

2、开启I2C2进行OLED屏配置
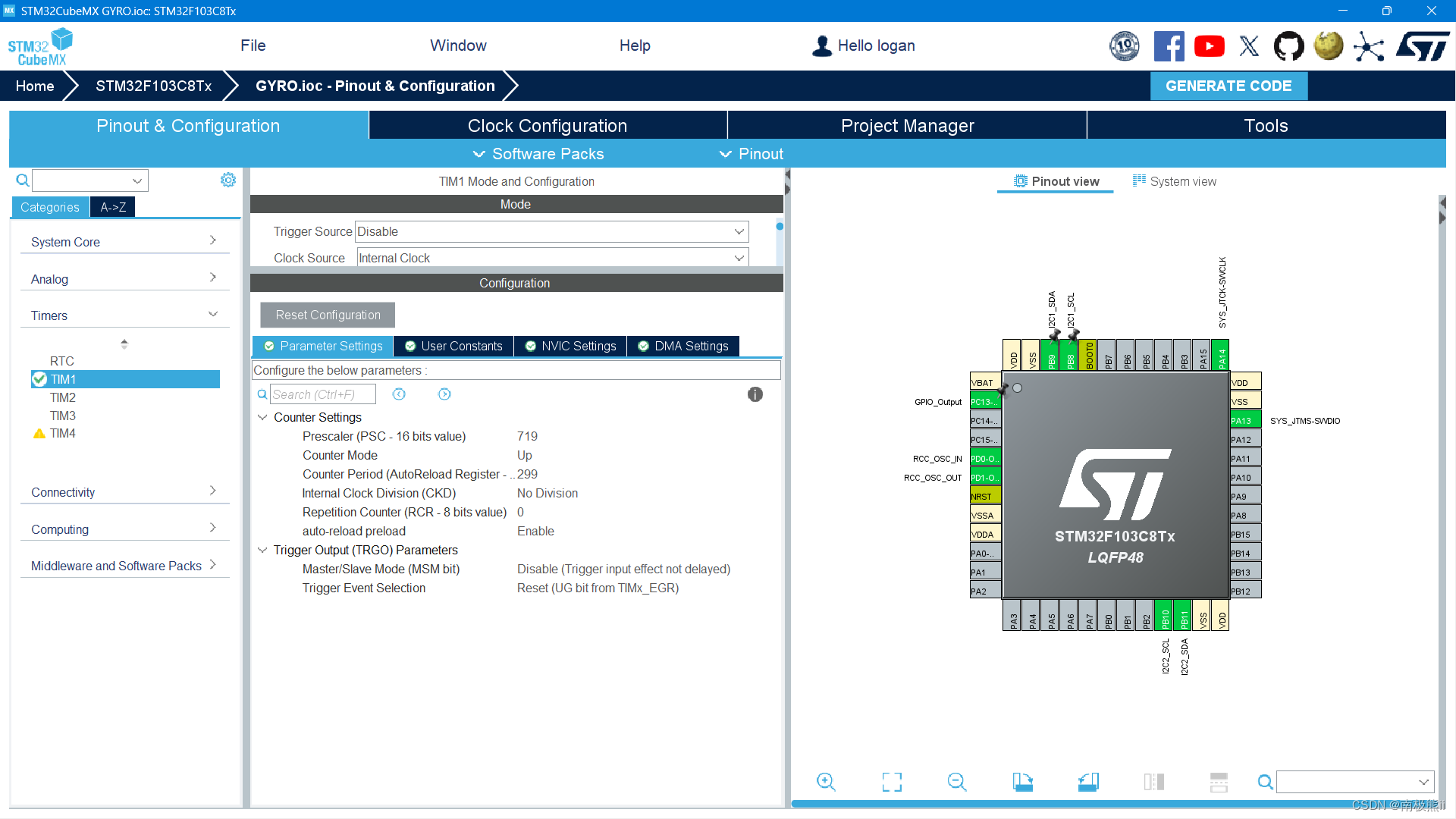
3、开启定时器1
至此,CUBEMX配置完成
五、巨人之肩
实际原理与代码讲解见:
基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)
【记录】自己动手使用HAL库对MPU6050进行编程
六、源码提供
【STM32+HAL】姿态传感器陀螺仪MPU6050模块

![LeetCode 刷题 [C++] 第139题.单词拆分](https://img-blog.csdnimg.cn/direct/6a70fdcb487c49119367420e53f7c921.png)


![【洛谷 P8682】[蓝桥杯 2019 省 B] 等差数列 题解(数学+排序+差分)](https://img-blog.csdnimg.cn/direct/1e7d14a3279041388777583541e4c7fe.png)