1、查看 rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree2、查看ros node 关系
rqt_graph3、列出所有话题
rostopic list4、查看某一话题的类型
以 /scan 为例
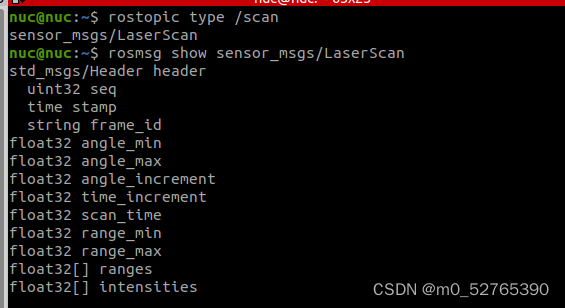
rostopic type /scan![]()
5、查看某个数据类型包含哪些数据
rosmsg show sensor_msgs/LaserScansensor_msgs/LaserScan 是 /scan 话题的类型。
1、查看 rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree2、查看ros node 关系
rqt_graph3、列出所有话题
rostopic list4、查看某一话题的类型
以 /scan 为例
rostopic type /scan![]()
5、查看某个数据类型包含哪些数据
rosmsg show sensor_msgs/LaserScansensor_msgs/LaserScan 是 /scan 话题的类型。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1492995.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!







![[BUUCTF]-PWN:starctf_2019_babyshell解析(汇编\x00开头绕过+shellcode)](https://img-blog.csdnimg.cn/direct/a949ec553e14483895f9220c11c0f31c.png)