文章目录
- 地图分类
- 概念
- 覆盖栅格建图算法
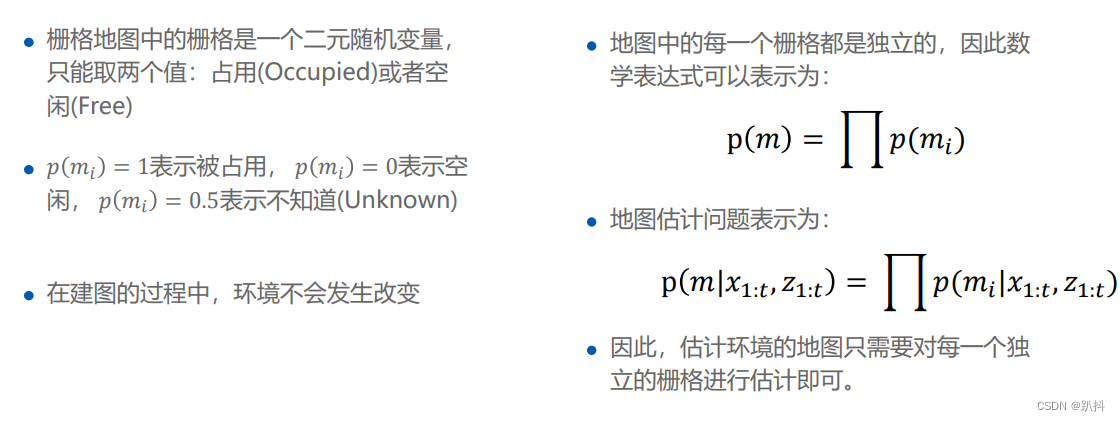
- 栅格地图的特征
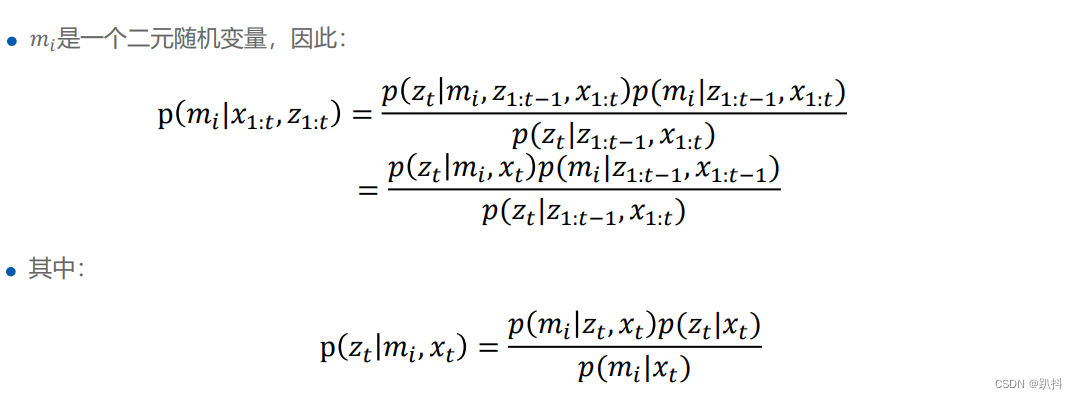
- 数学描述
- 假设
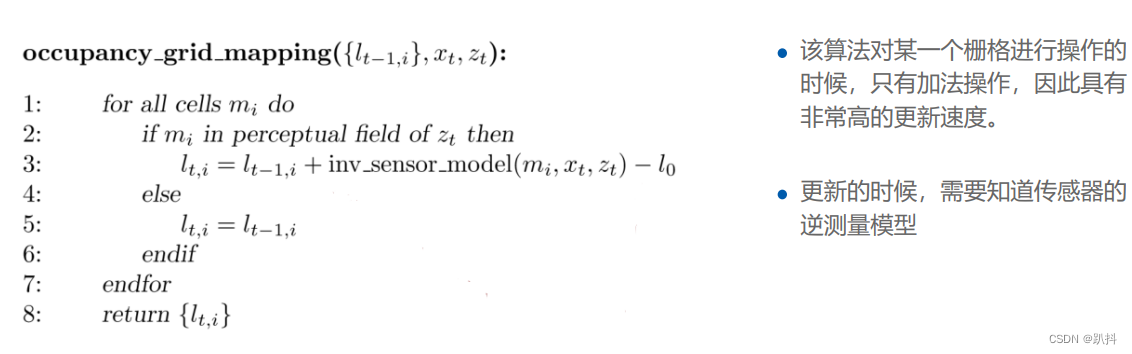
- 算法流程
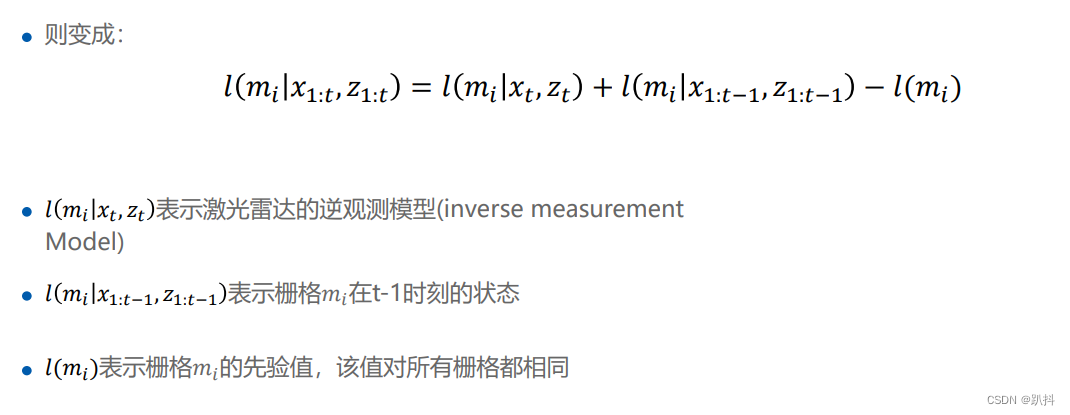
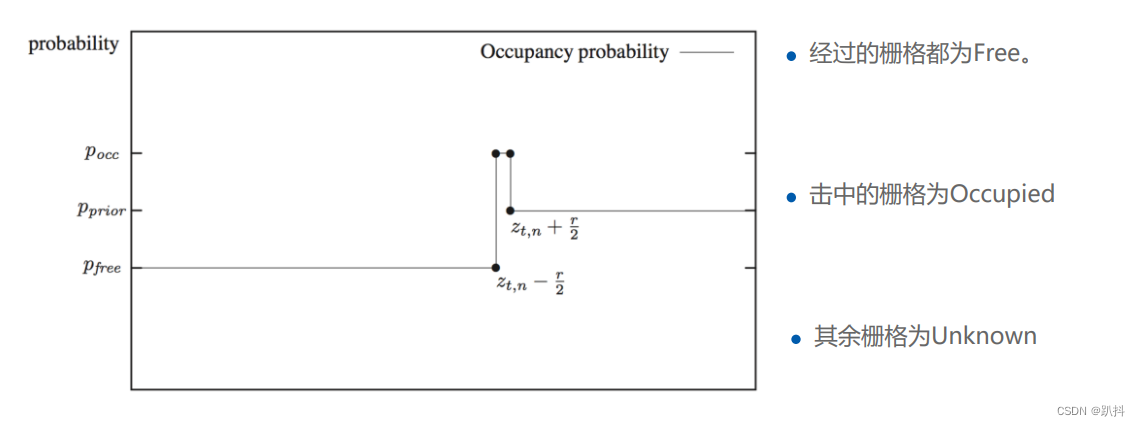
- 激光雷达的逆观测模型
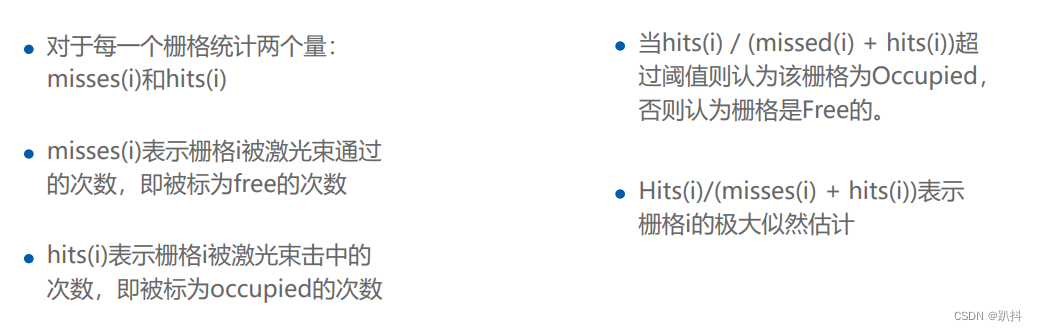
- 计数(Count Model)建图算法
- 概念
- 数学描述
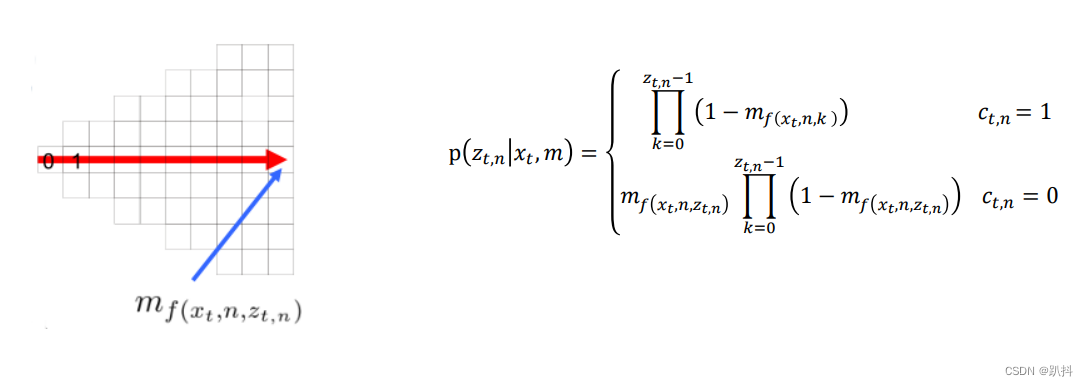
- 观测模型
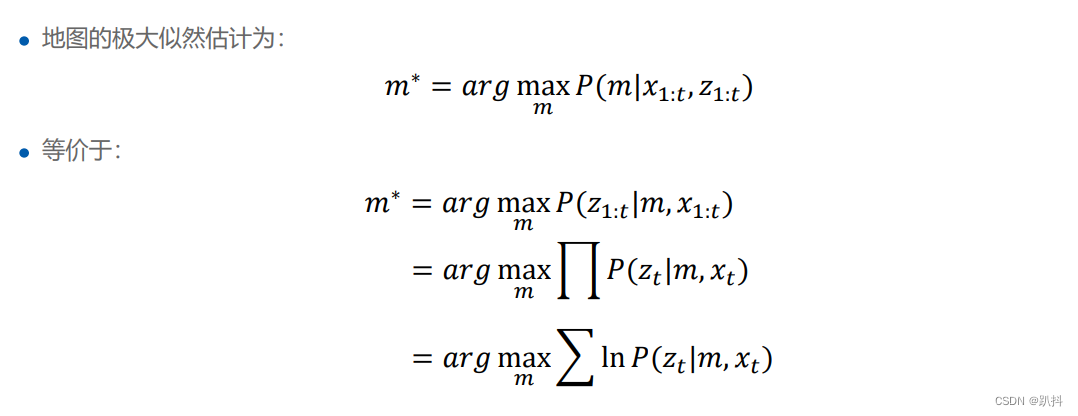
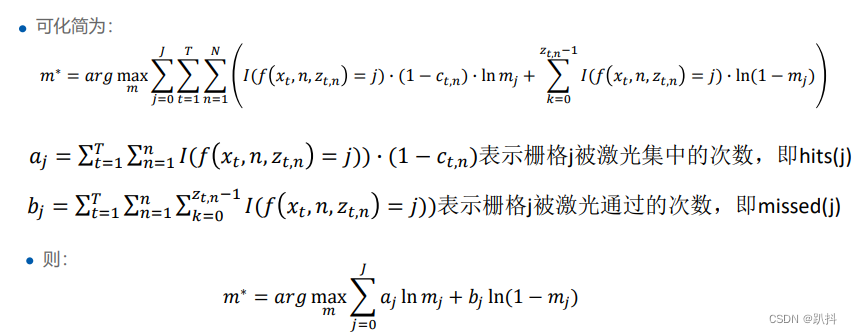
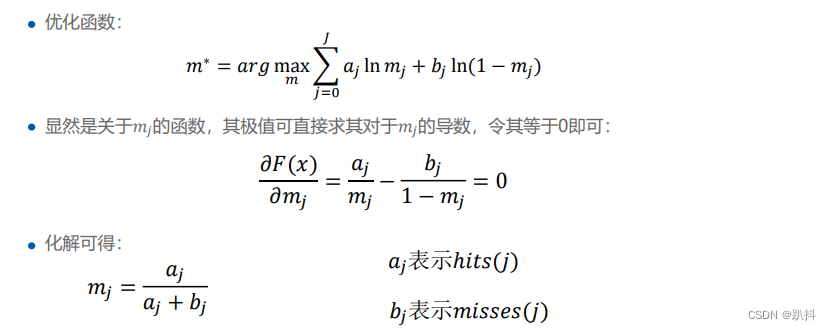
- 地图估计
地图分类
概念
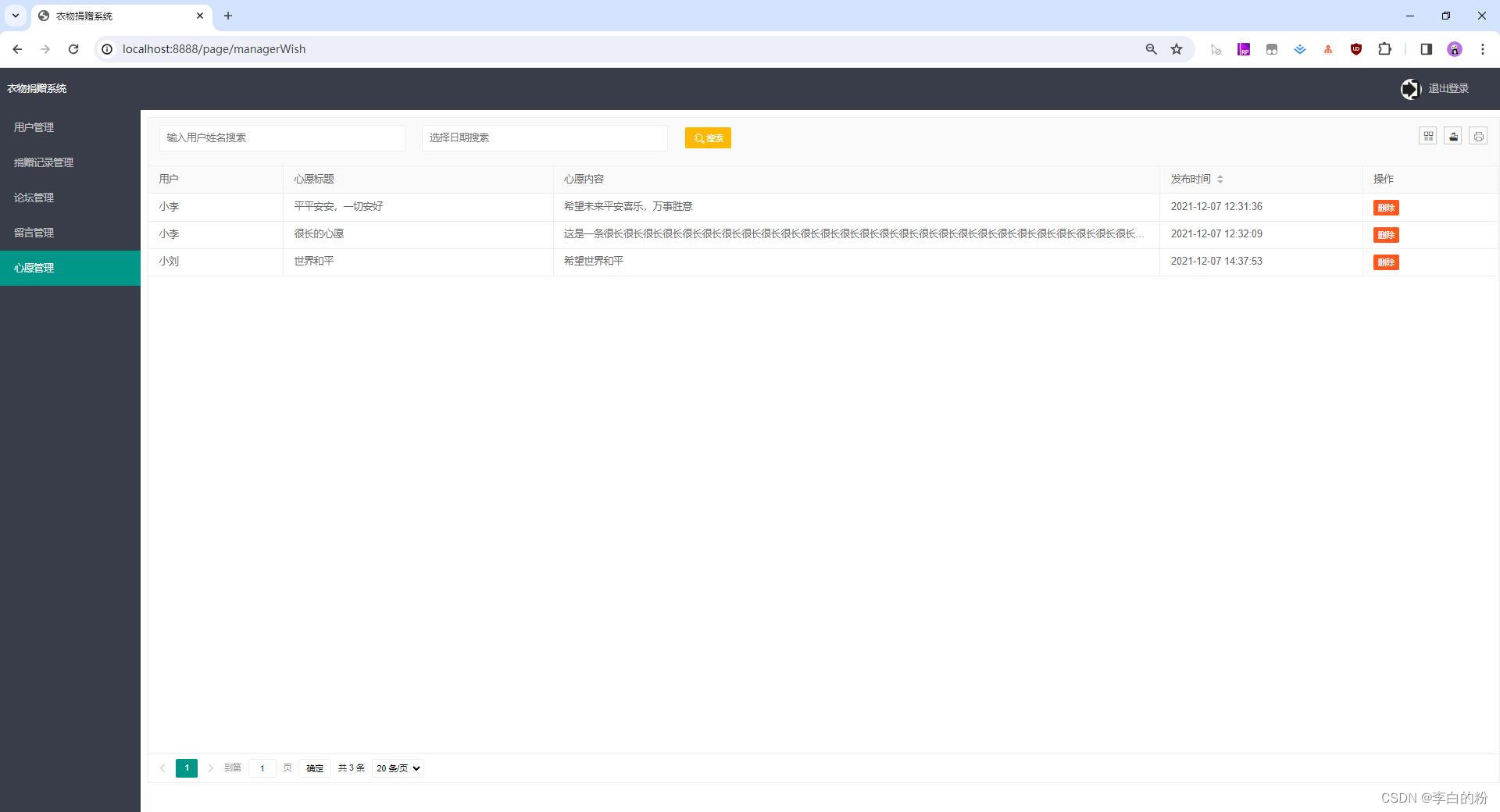
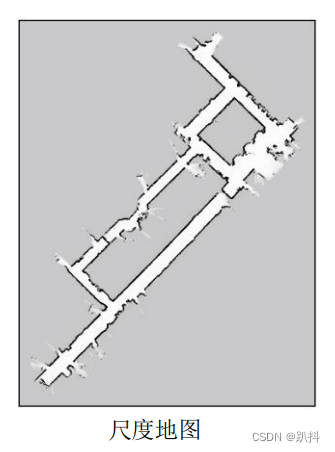
地图即为环境的空间模型。环境地图是机器人进行定位和规划的前提。定位可以用特征地图(视觉),规划可以用栅格地图。地图主要分为三类:
- 尺度地图中的距离跟实际世界相对应。包括特征地图、栅格地图、点云地图。一般用于机器人定位。
- 拓扑地图用于表示两点之间的联通关系,包括是否连通以及距离,不包括路径形状等特点。一般用于大场景下。导航优先搜索拓扑地图,再搜索尺度地图。
- 语义地图为加标签的尺度地图
覆盖栅格建图算法
栅格地图的特征
把环境分解成一个一个的小栅格,每个栅格有两种状态:占用(Occupied)或者空闲(free)
由于分辨率的设置,有可能去除小的可通行区域。可以使用自适应分辨率的地图缓解。同时,栅格地图是非参模型,也就是说由很多栅格组成(这话听起来有点奇怪hhh)。随着地图的增大,内存需求急剧增加。
栅格地图天然区分可通行区域,适合进行路径规划。
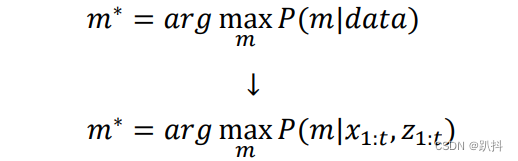
数学描述
- 给定机器人的位姿和传感器的观测数据
(主要指激光雷达)。

- 估计出最可能的地图
假设
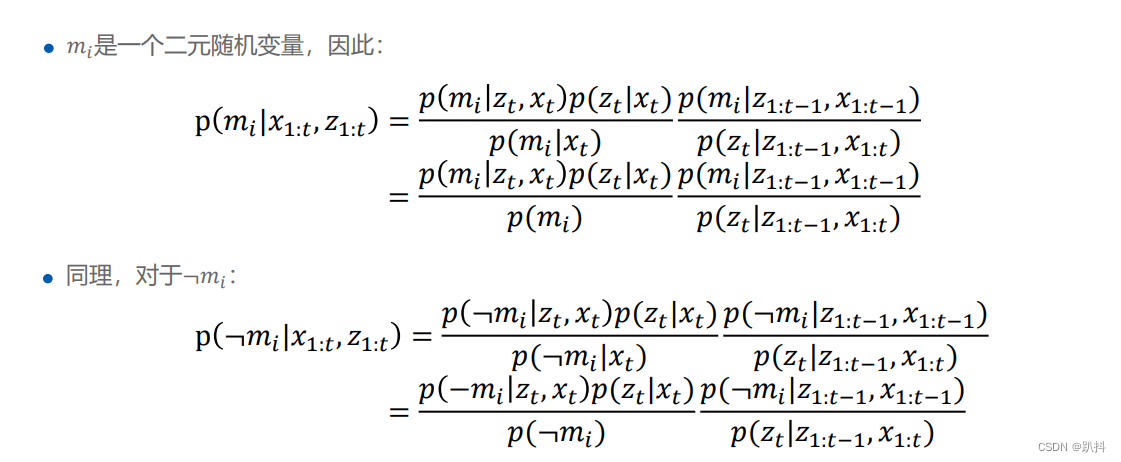
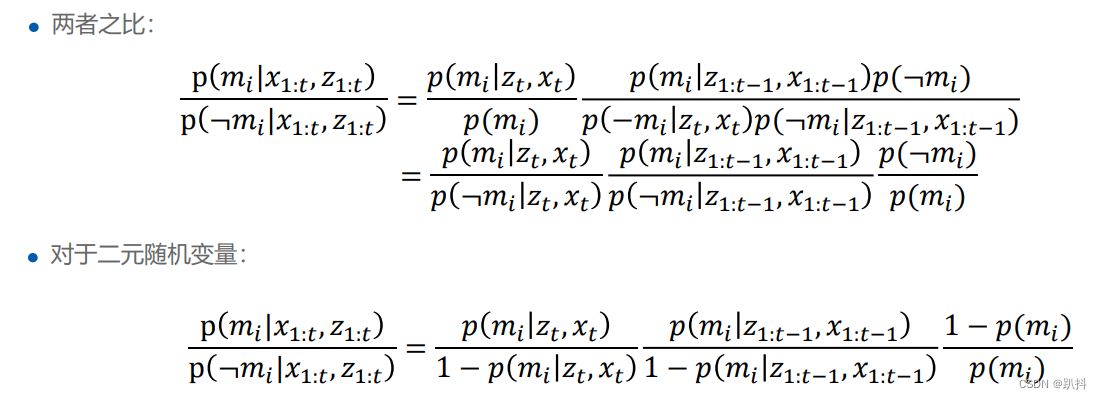
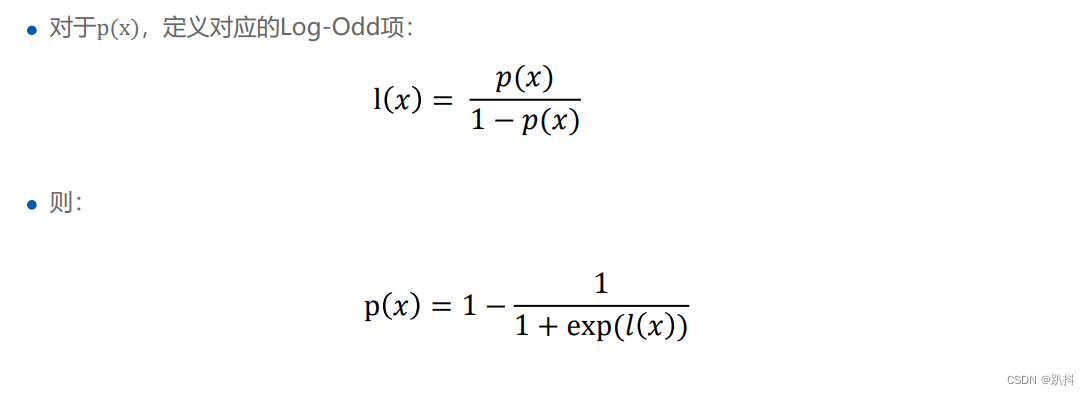
算法流程
激光雷达的逆观测模型
计数(Count Model)建图算法
概念
数学描述
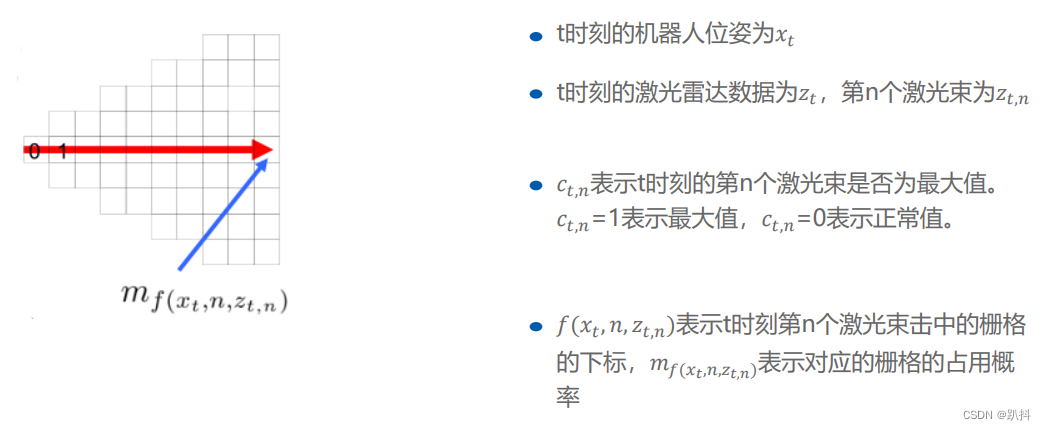
观测模型
地图估计


![gcd+线性dp,[蓝桥杯 2018 国 B] 矩阵求和](https://img-blog.csdnimg.cn/direct/089dfcfe8ad64cef994d8e798dcd2922.png)