0. 简介
我们常说的位姿图松弛指的就是基于闭环检测的边进行位姿图优化。而位姿图松弛已成为SLAM中不可或缺的补充,能够在满足逐对相对变换约束的目标下,实现传感器参考帧的高效全局配准。这些约束可以通过增量运动估计或全局地点识别来给出。尽管后一种情况可以实现闭环和漂移补偿,但在单目情况下需要注意,局部结构和位移的估计与实际情况可能不同,不仅在噪声方面,还可能存在尺度因子方面的差异。由于尺度传播误差的累积,这个尺度因子会随时间漂移,因此《Scale jump-aware pose graph relaxation for monocular SLAM with re-initializations》一文引入了尺度漂移感知的位姿图松弛。我们将这个想法扩展到后续传感器帧之间的相对尺度未知的情况,如果单目 SLAM 进入重新初始化并且无法识别连续局部地图之间的可靠重叠,则很容易发生这种情况。该方法是通过混合姿态图公式实现的,该公式将常规相似性一致性项与新的尺度盲约束相结合。我们将该技术应用于能够实现纯旋转位移的小型室内服务机器人的实际相关案例,这种情况很容易导致跟踪失败。我们证明,即使沿循环发生多次重新初始化,也可以恢复全局一致的轨迹,并对成功和失败案例进行了深入研究。
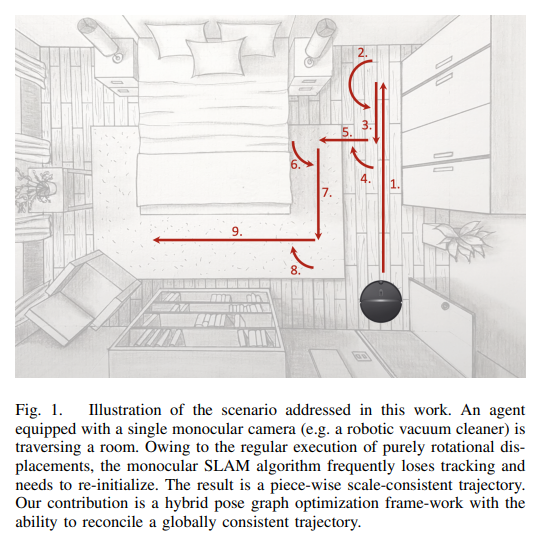
图1. 本文所讨论的场景示意图。一个配备有单目摄像头(例如机器人吸尘器)的智能体正在穿越一个房间。由于定期执行纯旋转位移,单目SLAM算法经常会失去跟踪并需要重新初始化。结果是一个分段尺度一致的轨迹。我们的贡献是一个混合位姿图优化框架,具有调和全局一致轨迹的能力
1. 主要贡献
本文的贡献如下:
• 我们证明了在重新初始化引起尺度跳变的情况下,简单地将相对尺度设置为1并应用尺度漂移感知松弛方法可能会导致严重的失真。
• 我们引入了一种新颖的混合位姿图优化框架,该框架允许在重新初始化边上使用无尺度因子,并展示了这个看似简单的改变如何在循环图中实现尺度协调和无失真估计,即使面临多次跟踪失败。
• 我们对可以容忍的失败边的数量和空间配置进行了全面讨论,并揭示了关键配置,其中无法获得全局一致的估计(仅限于单个全局尺度因子)。
2. 理论介绍
我们将从回顾传统的姿态图优化的表述开始,包括其解决方案以及使用相似变换进行尺度漂移适应。接下来,我们将介绍我们修改后的混合姿态图表述,明确考虑了未知尺度跳跃的存在。最后,我们将讨论退化情况,并提出一种方法来确定是否可以调和单一的全局一致尺度因子。
3. 尺度漂移感知姿态图优化的简要回顾
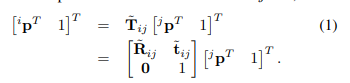
姿态图优化问题可以抽象如下。设 T ~ i j \tilde{T}_{ij} T~ij为两个相邻传感器帧 i i i和 j j j之间的测量相对变换。它是一个欧几里得变换,可以用于线性映射从传感器帧j到i的齐次表示中的点,因此
在姿态图优化中,估计的变量由绝对传感器帧姿态 T i T_i Ti 给出,这些姿态被定义为线性映射传感器帧中的点到全局参考帧。
位姿图优化的目标是估计绝对传感器帧姿态 T i T_i Ti,使其与每个测量的相对姿态之间的总差异最小化。形式上,目标可以表示为: