说明:
- 面试群,群号: 228447240
- 面试题来源于网络书籍,公司题目以及博主原创或修改(题目大部分来源于各种公司);
- 文中很多题目,或许大家直接编译器写完,1分钟就出结果了。但在这里博主希望每一个题目,大家都要经过认真思考,答案不重要,重要的是通过题目理解所考知识点,好应对题目更多的变化;
- 博主与大家一起学习,一起刷题,共同进步;
- 写文不易,麻烦给个三连!!!
1.IO口工作方式(学过STM32的人应该很熟悉)
答案:
上拉输入、下拉输入、推挽输出、开漏输出。
2.请说明总线接口USRT、I2C、USB的异同点
答案:
(串
/
并、速度、全
/
半双工、总线拓扑等)
| 总线接口 | 串/并 | 同步/异步 | 速率 | 工作方式 | 用线 | 总线拓扑结构 | 通信距离 |
| UART | 串 | 异步 | 慢 波特率设置 | 全双工 | 2线 Rx、Tx | RS485支持总线式、星形、树形 | 远 最远1200 |
| I2C | 串 | 同步 | 慢 | 半双工 | 2线 SDA、SCL | 总线型 | 近 |
| SPI | 串 | 同步 | 快 | 全双工 | 3线或4线 SCLK、SIMO、 SOMI、SS(片选) | 环形 | 远 |
| USB | 串 | 同步 | 快 | 半双工 | 4线 Vbus(5V)、GND、D+、D-(3.3V) | 星形 | 近 |
3.IIC协议时序图
答案:
必须会画出来
IIC
协议有两根线,一根
SCL
时钟线,一根
SDA
数据线,如图可以看到开始信号和结束信号的电平状态。 开始后,因为IIC
总线可以挂在很多设备(不超过
8
个),所以先发送一个设备地址,选中这个设备,设备地址最后一位代表了是写还是读。选中设备后,再发送寄存器地址,代表选中某个寄存器,再开始传输数据。
八位设备地址
=7
位从机地址
+
读
/
写地址,
再给地址添加一个方向位位用来表示接下来数据传输的方向,
0
表示主设备向从设备
(write)
写数据, 1表示主设备向从设备(read)
读数据。
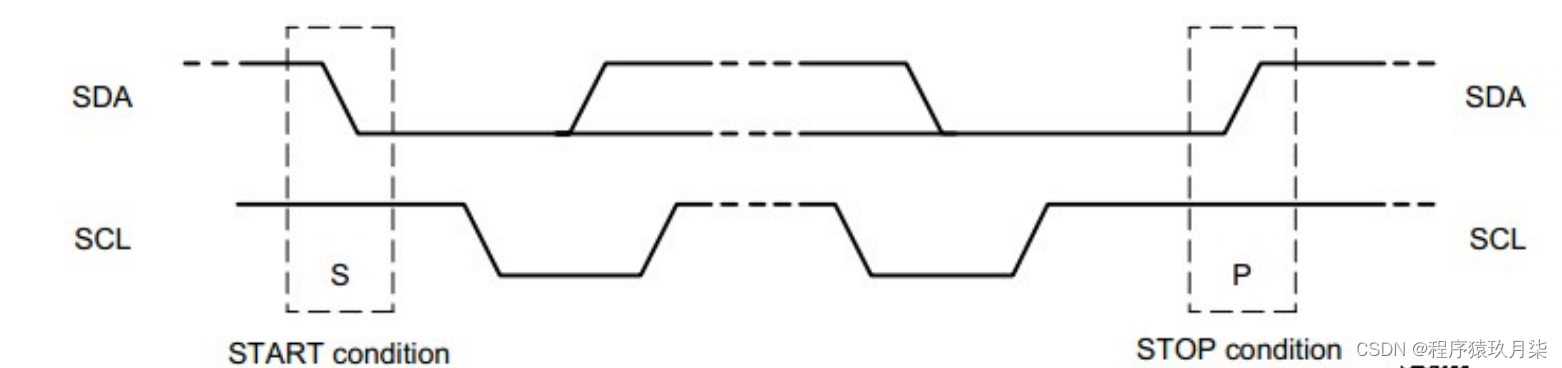
开始信号:
SCL
为高电平时,
SDA
由高电平向低电平跳变,开始传送数据。
结束信号:
SCL
为高电平时,
SDA
由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的
IC
在接收到
8bit
数据后,向发送数据的
IC
发出特定的低电平脉冲,表示已收到数据。CPU
向受控单元发出一个信号后,等待受控单元发出一个应答信号,
CPU
接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
IIC
信号在数据传输过程中,当
SCL=1
高电平时,数据线
SDA
必须保持稳定状态,不允许有电平跳变,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。SCL=1
时 数据线
SDA的任何电平变换会看做是总线的起始信号或者停止信号。
4.单片机的SP指针始终指向
答案:
栈顶。
5.IIC总线在传送数据过程中共有三种类型信号
答案:
它们分别是:开始信号、结束信号和应答信号。
6.FIQ中断向量入口地址,IRQ呢
答案:
FIQ
和
IRQ
是两种不同类型的中断,
ARM
为了支持这两种不同的中断,提供了对应的叫做
FIQ
和
IRQ
处理器模式(ARM
有
7
种处理模式)。
FIQ的中断向量地址在0x0000001C,而IRQ的在0x00000018。
7.SPI四种模式,简述其中一种模式,画出时序图
答案:
在芯片资料上极性和相位一般表示为
CPOL
(
Clock POLarity
)和
CPHA(Clock PHAse),
极性和相位组合成4
种工作模式。
| CPOL | CPHA | |
| 模式1 | 0 | 0 |
| 模式2 | 0 | 1 |
| 模式3 | 1 | 0 |
| 模式4 | 1 | 1 |
spi
四种模式
SPI
的相位
(CPHA)
和极性
(CPOL)
分别可以为
0
或
1
,对应的
4
种组合构成了
SPI
的
4
种模式(mode)
时钟极性
CPOL:
即
SPI
空闲时,时钟信号
SCLK
的电平(
1:
空闲时高电平
; 0:
空闲时低电平) 时钟相位CPHA: 即
SPI
在
SCLK
第几个边沿开始采样(
0:
第一个边沿开始
; 1:
第二个边沿开始)
sd
卡的
spi
常用的是
mode 0
和
mode 3,这两种模式的相同的地方是都在时钟上升沿采样传输数据,区别这两种方式的简单方法就是看空闲时,时钟的电平状态,低电平为
mode 0
,高电平为
mode 3
。
8.讲一讲冯诺依曼和哈佛体系的区别
答案:
哈佛结构是一种将程序指令存储和数据存储分开的存储器结构。目前使用哈佛结构的中央处理器和微控制器有很多,ARM9
、
ARM10
和
ARM11
,
51
单片机属于哈佛结构。
冯
·
诺伊曼结构也称普林斯顿结构,是一种将程序指令存储器和数据存储器合并在一起的存储器结构。
9.USART为什么一次只能发送一个字节? 先发高位还是低位
答案:
考虑数据准确性,时间误差的累计。
比如你发送的数据为1111 0000 那么接收方如何知道你连续发送了几个1几个0,这个时候就需要波特率,通过计算时间可以知道你发送了几个连续1或0,因为波特率规定了每发一个Bit的时间,但是发送方和接收方可能存在时间误差,会导致累计时间误差,导致数据不正确,所以这个时候就需要规定每次只能发送一个字节数据,就可以避免累计时间误差,这也是异步导致的。
先发低位。
10.串口通信存在的问题
答案:
1)串口只是规定了协议,即帧格式,用高电平表示1,低电平表示0,但是在不同的处理器中这个定义是不一样的,电气特性不一样,所以这两个处理器是不能直接连接的。
2)抗干扰能力差,使用的是 TTL 信号表示0和1。
3)通信距离短,只能用于一个电路板上的两个不同芯片之间的通信。
由于串口通信存在的问题就出现了RS232、RS485协议,但是软件编程还是串口那样编程,因为改的只是硬件上的电性。
![【蓝桥杯冲冲冲】[NOIP2003 普及组] 数字游戏](https://img-blog.csdnimg.cn/img_convert/5fbf457faea6bf146289b47af5e9ef11.png)