惯性导航—常用坐标系
捷联惯导系统的导航解算中,常用到四个坐标系,接下来介绍四个坐标系定义及其表示符号。
1 地心惯性坐标系(i系)
惯性传感器的输出是以该坐标系为参考基准的。
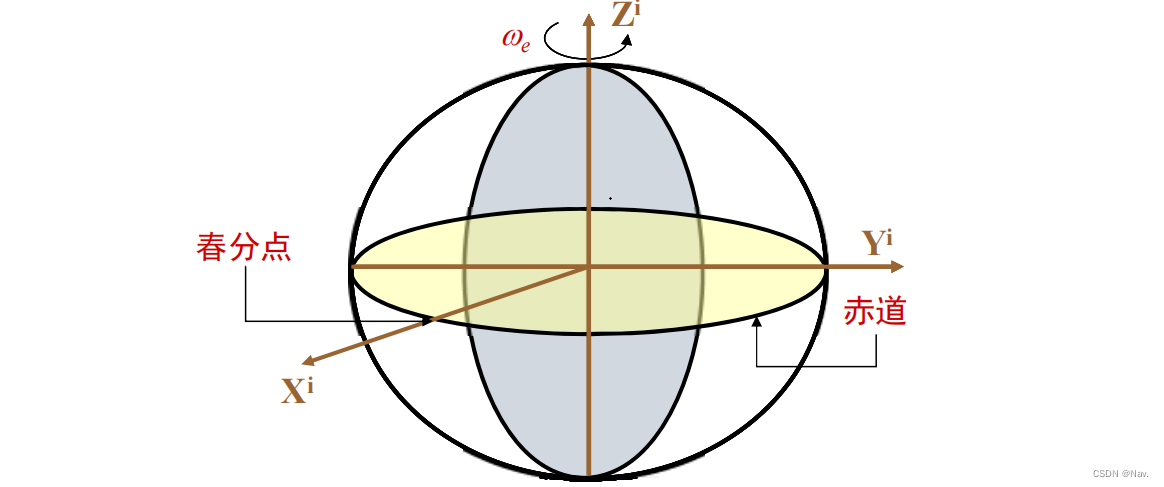
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 地球中心 | 赤道平面内,指向春分点 | 沿地球自转轴,指向北极 | 按右手坐标系定义 |
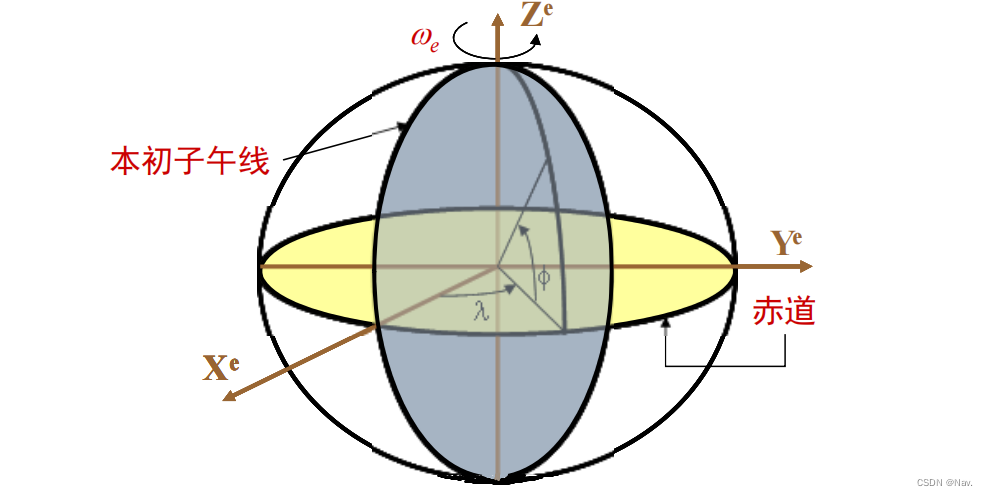
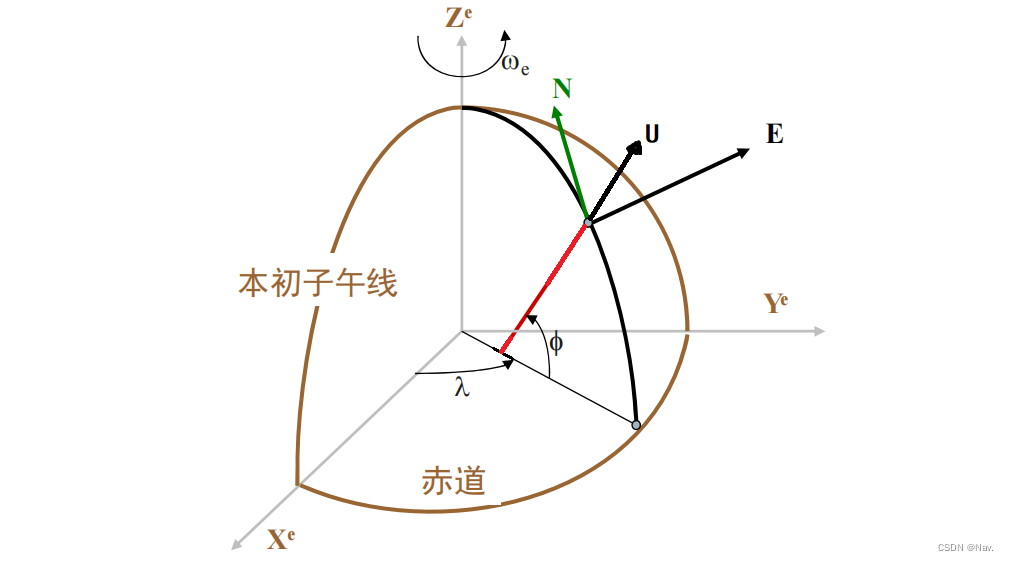
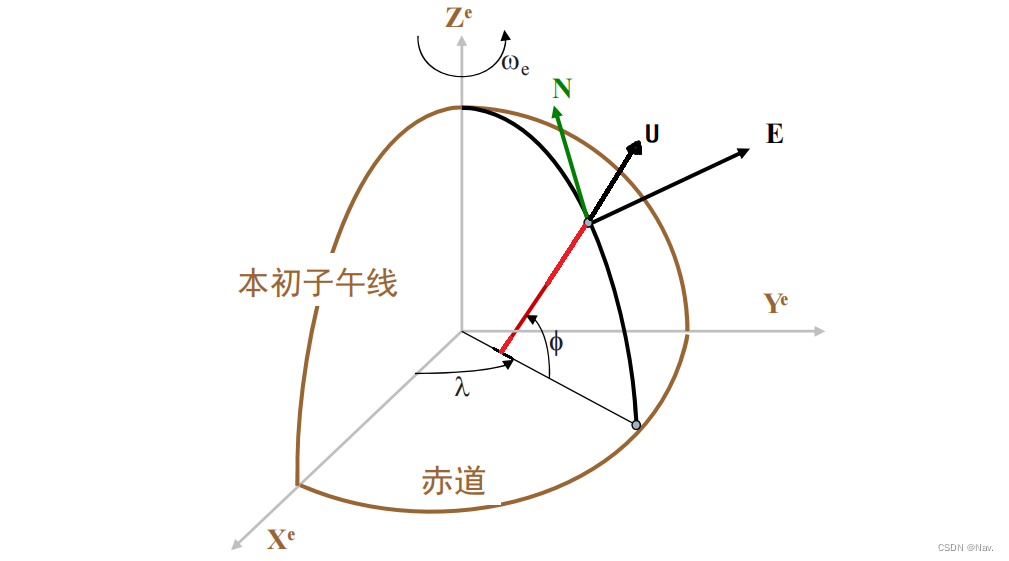
2 地球坐标系(e系)
地球坐标系相对于惯性坐标系的角速度大小就是地球自转角速率,其值通常取
ω
i
e
\omega_{ie}
ωie = 7.2921151467 ×
1
0
−
5
10_{}^{-5}
10−5rad/s = 15.0410671786°/h。
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 地球中心 | 赤道平面内,指向本初子午线 | 沿地球自转轴,指向北极 | 按右手坐标系定义 |
3 地理坐标系(g系)
地理坐标系是一种当地水平坐标系,随运载体在地球表面移动而移动。
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 地理东向 | 垂直于当地椭球面,指向天向 | 地理北向 |
4 导航坐标系(n系)
一般选择“东 - 北 - 天”地理坐标系作为导航坐标系。
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 地理东向 | 垂直于当地椭球面,指向天向 | 地理北向 |
5 载体坐标系(b系)
以管道机器人为例,x轴沿载体横轴向右,y轴沿载体纵轴向前,z轴沿载体立轴向上。

| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 沿载体横轴向右 | 沿载体立轴向上 | 沿载体纵轴向前 |




![解决nginx: [error] open() "/usr/local/nginx/logs/nginx.pid" failed错误](https://img-blog.csdnimg.cn/direct/b9dd8d8fda6049238ef815b8ebafa6e9.png)