文章目录
前言
1 布线和设置
2 参数说明
前言
Plane-4.0.0(及更高版本)、Copter-4.0.4(及更高版本)和 Rover-4.1.0(及更高版本)支持 Graupner HOTT 遥测技术。

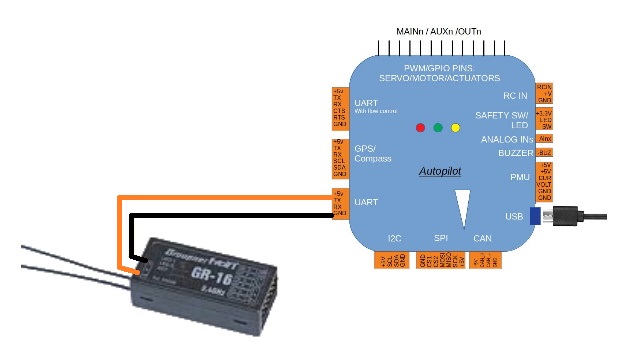
1 布线和设置
与自动驾驶仪的连接可通过任何 UART 端口的 TX 输入进行,但不带 RTS/CTS 流量控制的端口配置更简单,因为不需要流量控制。
要启用 HOTT 遥测功能,例如在第一个 TELEM 端口 SERIAL1 上:
- SERIAL1_BAUD set to 19 (for 19.2KBaud);
- SERIAL1_PROTOCOL set to 27 (HOTT);
- SERIAL1_OPTIONS set to 4 (Half Duplex);
- BRD_SER1_RTSCTS设置为 0 时禁用流量控制(可选)。
2 参数说明
1、SERIAL1_PROTOCOL:串行1协议选择
注意:更改后需要重新启动。
控制 Serial1 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values |
|---|
| Value | Meaning |
|---|
| -1 | None | | 1 | MAVLink1 | | 2 | MAVLink2 | | 3 | Frsky D | | 4 | Frsky SPort | | 5 | GPS | | 7 | Alexmos Gimbal Serial | | 8 | Gimbal | | 9 | Rangefinder | | 10 | FrSky SPort Passthrough (OpenTX) | | 11 | Lidar360 | | 13 | Beacon | | 14 | Volz servo out | | 15 | SBus servo out | | 16 | ESC Telemetry | | 17 | Devo Telemetry | | 18 | OpticalFlow | | 19 | RobotisServo | | 20 | NMEA Output | | 21 | WindVane | | 22 | SLCAN | | 23 | RCIN | | 24 | EFI Serial | | 25 | LTM | | 26 | RunCam | | 27 | HottTelem | | 28 | Scripting | | 29 | Crossfire VTX | | 30 | Generator | | 31 | Winch | | 32 | MSP | | 33 | DJI FPV | | 34 | AirSpeed | | 35 | ADSB | | 36 | AHRS | | 37 | SmartAudio | | 38 | FETtecOneWire | | 39 | Torqeedo | | 40 | AIS | | 41 | CoDevESC | | 42 | DisplayPort | | 43 | MAVLink High Latency | | 44 | IRC Tramp |
|
2、 SERIAL1_OPTIONS:Telem1 选项
注意:该参数适用于高级用户。
注意:更改后需要重新启动。
控制 UART 选项。InvertRX 选项控制接收引脚的反相。InvertTX 选项控制发送引脚的反转。HalfDuplex 选项控制半双工(单线)模式,即发送和接收都在发送线上完成。交换选项允许在基于 STM32F7 的电路板上交换 RX 和 TX 引脚。
| Bitmask |
|---|
| Bit | Meaning |
|---|
| 0 | InvertRX | | 1 | InvertTX | | 2 | HalfDuplex | | 3 | SwapTXRX | | 4 | RX_PullDown | | 5 | RX_PullUp | | 6 | TX_PullDown | | 7 | TX_PullUp | | 8 | RX_NoDMA | | 9 | TX_NoDMA | | 10 | Don’t forward mavlink to/from | | 11 | DisableFIFO | | 12 | Ignore Streamrate |
|