1、队列介绍
队列是FreeRTOS提供的一种重要的通信机制,用于在任务之间传递数据。
FreeRTOS队列是一种先进先出(FIFO)的数据结构,用于在任务之间传递消息或数据项。它允许一个任务将数据项发送到队列,而另一个任务则可以从队列中接收这些数据项。
以下是FreeRTOS队列的一些重要特点和用法:
-
队列创建:可以使用FreeRTOS提供的API函数创建队列。在创建队列时,需要指定队列的最大长度和每个数据项的大小。
-
发送数据:任务可以使用
xQueueSend()函数将数据项发送到队列中。如果队列已满,发送操作将被阻塞,直到有空间可用。 -
接收数据:任务可以使用
xQueueReceive()函数从队列中接收数据项。如果队列为空,接收操作将被阻塞,直到有数据可用。 -
队列优先级:FreeRTOS队列还支持优先级功能。可以为队列设置优先级,使得在同时有多个任务等待发送或接收数据时,根据优先级决定哪个任务先进行操作。
-
队列长度:通过查询队列的长度,可以了解当前队列中待处理的数据项数量。这对于任务调度和资源管理非常有用。
使用FreeRTOS队列时,需要注意以下几点:
- 需要合理设置队列的长度,确保不会超过任务处理能力。
- 当队列满或空时,任务可能会被阻塞,因此要小心处理该种情况以避免死锁。
- 在多任务环境下,要注意同步和竞争条件,以确保数据的正确性和一致性。
总的来说,FreeRTOS队列提供了一种方便和高效的任务间通信机制,可以在嵌入式系统中实现数据传递和同步。它是FreeRTOS强大功能的一部分,帮助开发人员编写可靠的实时应用程序。
2、队列测试
2.1 任务创建

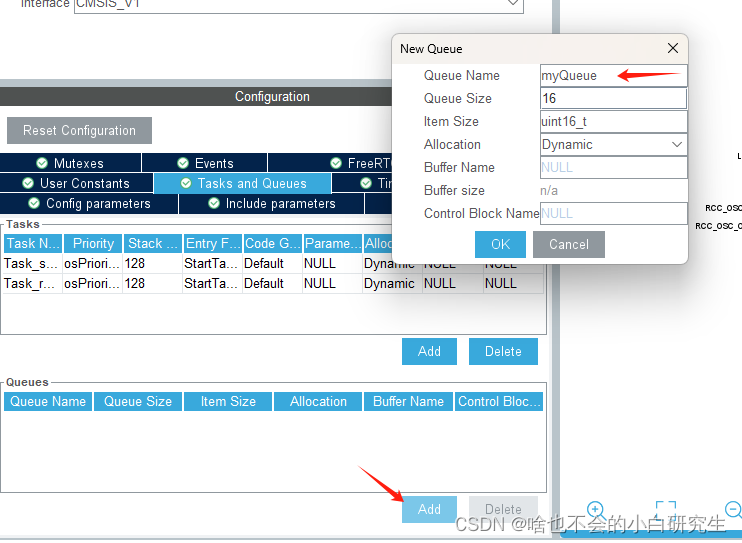
2.2 队列建立
3、队列API
3.1 创建队列
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize );
- 参数:
- uxQueueLength:队列可同时容纳的最大项目数 。
- uxItemSize:存储队列中的每个数据项所需的大小(以字节为单位)。
- 返回值:
- 如果队列创建成功,则返回所创建队列的句柄 。 如果创建队列所需的内存无法分配,则返回 NULL。
3.2 写队列
BaseType_t xQueueSend(
QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait
);
- 参数:
- xQueue:队列的句柄,数据项将发送到此队列。
- pvItemToQueue:待写入数据
- xTicksToWait:阻塞超时时间
- 返回值:
- 如果成功写入数据,返回 pdTRUE,否则返回 errQUEUE_FULL。
3.3读队列
BaseType_t xQueueReceive(
QueueHandle_t xQueue,
void *pvBuffer,
TickType_t xTicksToWait
);
- 参数:
- xQueue:待读取的队列
- pvItemToQueue:数据读取缓冲区
- xTicksToWait:阻塞超时时间
- 返回值:
- 成功返回 pdTRUE,否则返回 pdFALSE。
4、KEIL 5代码设计
4.1 写队列函数
void StartTask_send(void const * argument)
{
/* USER CODE BEGIN StartTask_send */
uint16_t buf = 100;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(key==0){
osDelay(20);
if(key==0){
printf("key按下\r\n");
status=xQueueSend(myQueueHandle,&buf,0);
if(status == pdTRUE){
printf("写入队列成功,写入值%d\r\n",buf);
}
else{
printf("写入失败\r\n");
}
}
while(key==0);
}
osDelay(10);
}
/* USER CODE END StartTask_send */
}4.2 读队列函数
void StartTask_receive(void const * argument)
{
/* USER CODE BEGIN StartTask_receive */
uint16_t buf;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(key2==0){
osDelay(20);
if(key2==0){
printf("key2按下\r\n");
status=xQueueReceive(myQueueHandle,&buf,0);
if(status == pdTRUE){
printf("读取队列成功,读出值%d\r\n",buf);
}
else{
printf("读取失败\r\n");
}
}
while(key2==0);
}
osDelay(10);
}
/* USER CODE END StartTask_receive */
}freertos.c代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId Task_sendHandle;
osThreadId Task_receiveHandle;
osMessageQId myQueueHandle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartTask_send(void const * argument);
void StartTask_receive(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the queue(s) */
/* definition and creation of myQueue */
osMessageQDef(myQueue, 16, uint16_t);
myQueueHandle = osMessageCreate(osMessageQ(myQueue), NULL);
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of Task_send */
osThreadDef(Task_send, StartTask_send, osPriorityNormal, 0, 128);
Task_sendHandle = osThreadCreate(osThread(Task_send), NULL);
/* definition and creation of Task_receive */
osThreadDef(Task_receive, StartTask_receive, osPriorityBelowNormal, 0, 128);
Task_receiveHandle = osThreadCreate(osThread(Task_receive), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTask_send */
/**
* @brief Function implementing the Task_send thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_send */
void StartTask_send(void const * argument)
{
/* USER CODE BEGIN StartTask_send */
uint16_t buf = 100;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(key==0){
osDelay(20);
if(key==0){
printf("key按下\r\n");
status=xQueueSend(myQueueHandle,&buf,0);
if(status == pdTRUE){
printf("写入队列成功,写入值%d\r\n",buf);
}
else{
printf("写入失败\r\n");
}
}
while(key==0);
}
osDelay(10);
}
/* USER CODE END StartTask_send */
}
/* USER CODE BEGIN Header_StartTask_receive */
/**
* @brief Function implementing the Task_receive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_receive */
void StartTask_receive(void const * argument)
{
/* USER CODE BEGIN StartTask_receive */
uint16_t buf;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(key2==0){
osDelay(20);
if(key2==0){
printf("key2按下\r\n");
status=xQueueReceive(myQueueHandle,&buf,0);
if(status == pdTRUE){
printf("读取队列成功,读出值%d\r\n",buf);
}
else{
printf("读取失败\r\n");
}
}
while(key2==0);
}
osDelay(10);
}
/* USER CODE END StartTask_receive */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
![[算法总结] 十大排序算法](https://img-blog.csdnimg.cn/img_convert/43e614b2f60c2b3e4904643ff4bb74f7.jpeg)

![[MySQL]数据库概述](https://img-blog.csdnimg.cn/direct/d532b71281fd452a902611020dcf7c14.png)