阻抗控制是一种模拟人类肌肉阻抗特性的控制方法,可以实现更快更精准的机器人运动控制,同时具有较小的接触力和稳定的跟踪精度。
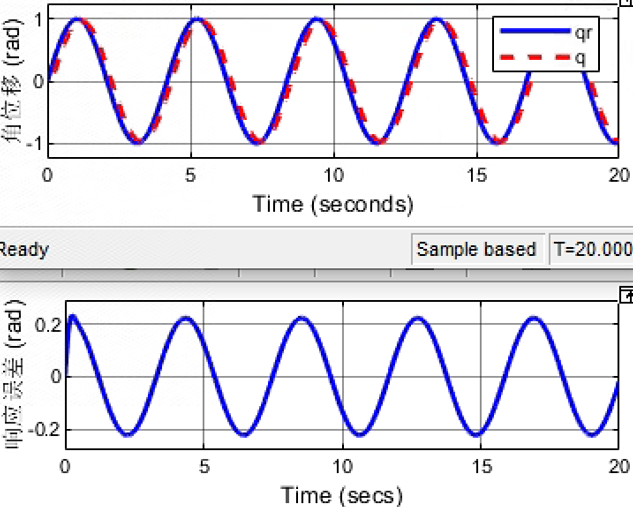
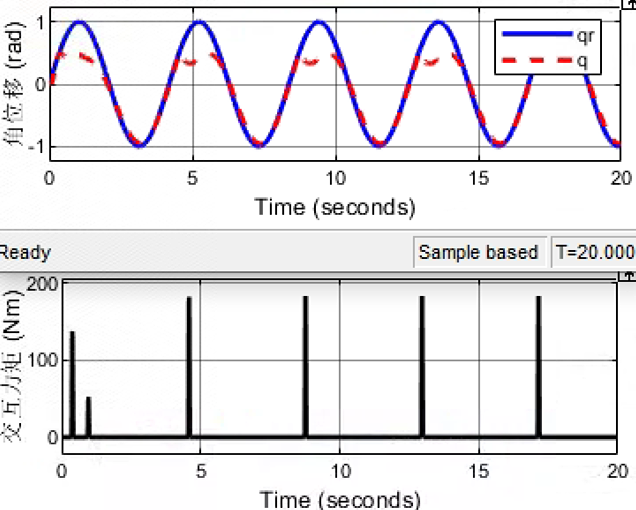
Kd = 10; Bd = 5 ; Md = 2;
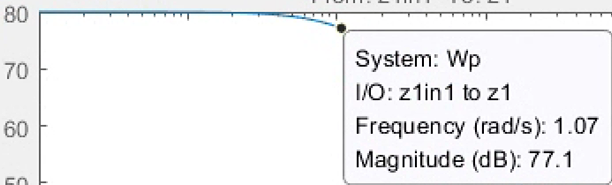
1e5/(0.0005*s^2+5*s+1)

5e4/(0.1*s^2+1*s+1)

1e4/(0.1*s^2+1*s+1)

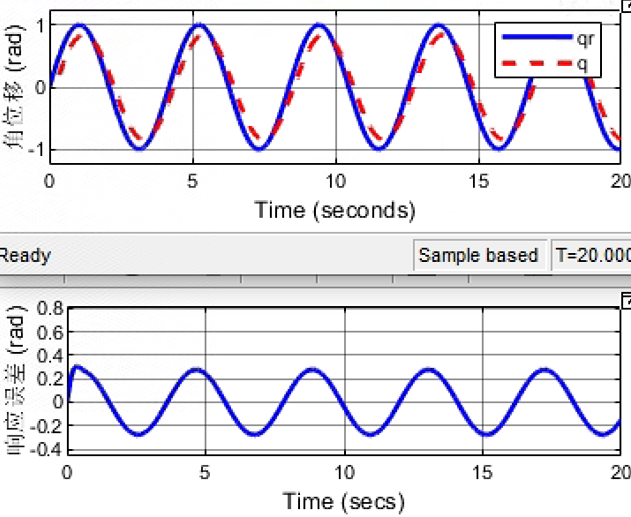
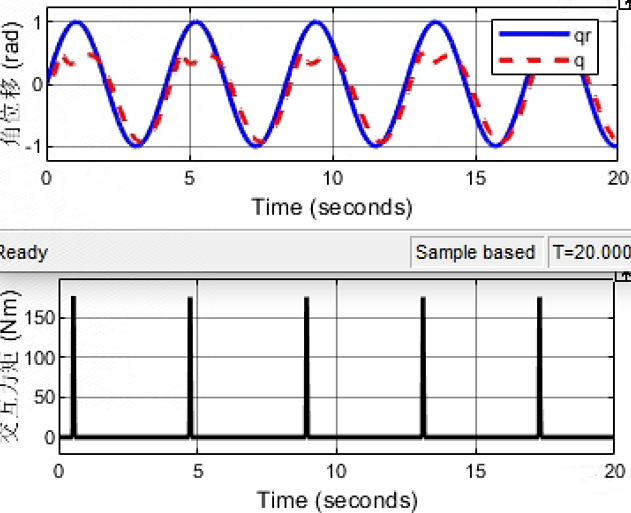
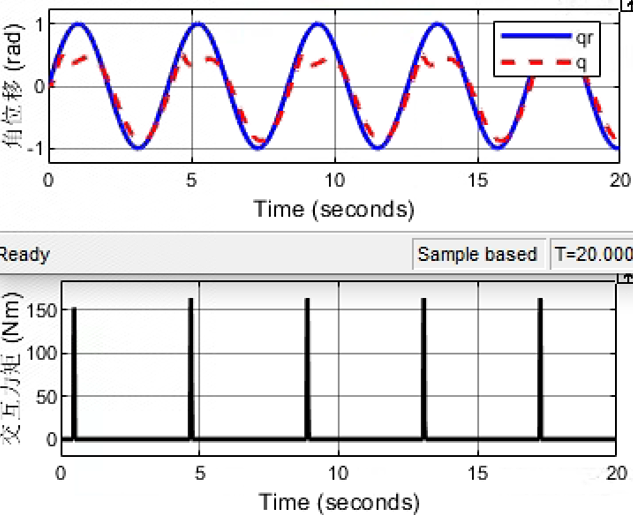
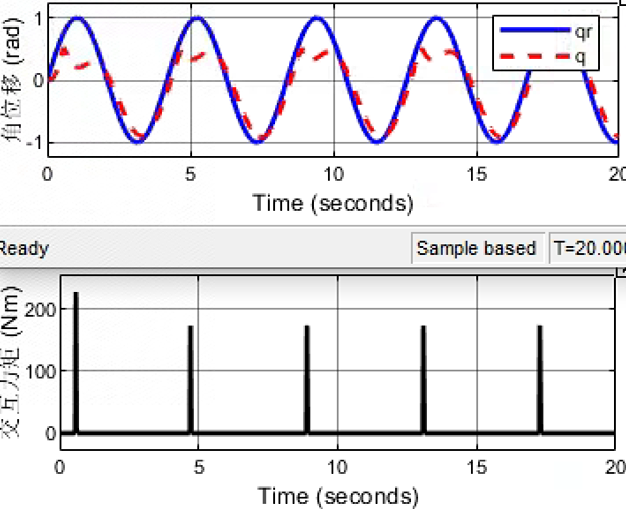
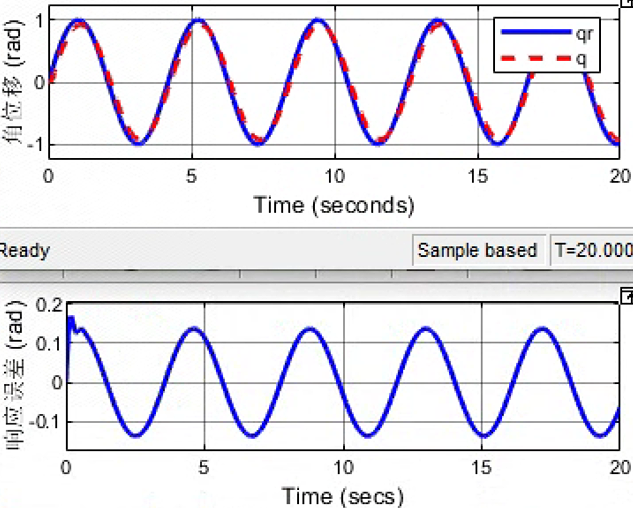
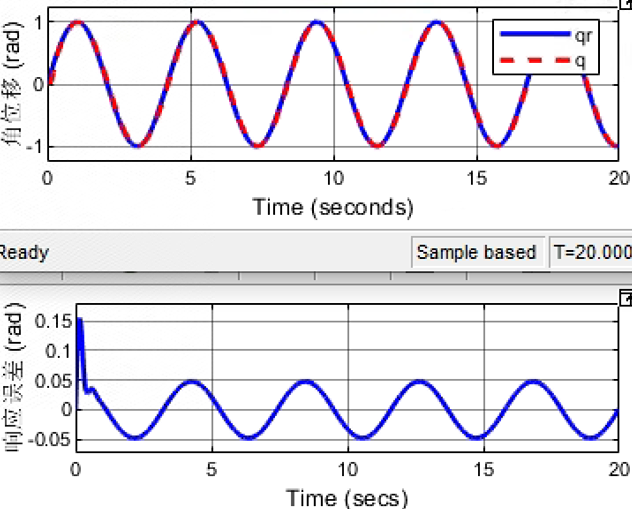
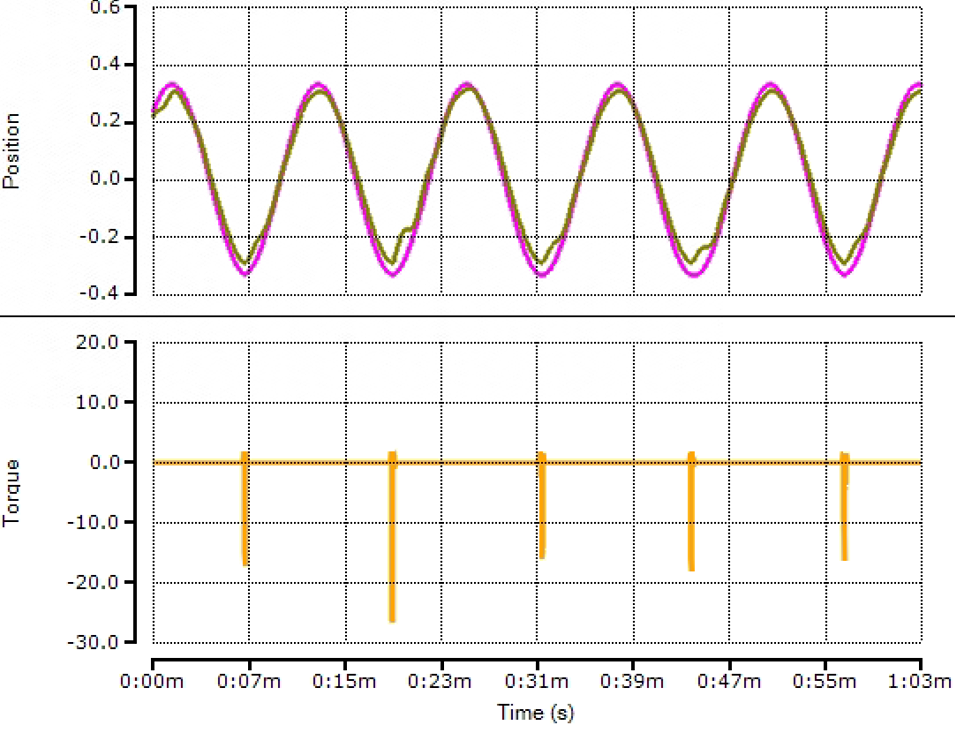
增益较小时容易跟踪性能不足!!!
1e4/(0.5*s^2+1*s+1)

6e4/(0.1*s^2+1*s+1)

6e4/(0.5*s^2+1*s+1)


![]()
6e4/(1*s^2+1*s+1)


1e5/(0.5*s^2+1*s+1)


![]()
Kp=6,Ki=0.01
4e5/(0.5*s^2+1*s+1)
1 state removed.
Kd = 10; Bd = 50 ; Md = 2;
1e4/(0.5*s^2+1*s+1)
![]()
19
Kd = 10; Bd = 50
1e4/(0.5*s^2+1*s+1)
![]()
19sin0.5t
1e4/(0.1*s^2+1*s+1)
![]()
Kd = 100; Bd = 50
2e4/(0.5*s^2+1*s+1)
![]()


19
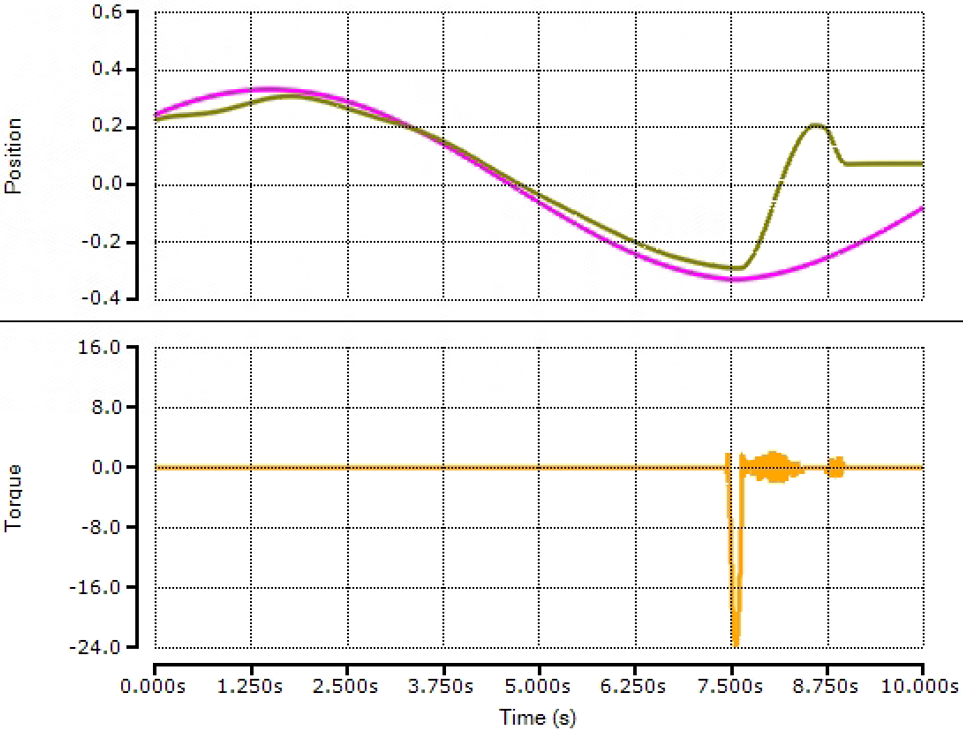
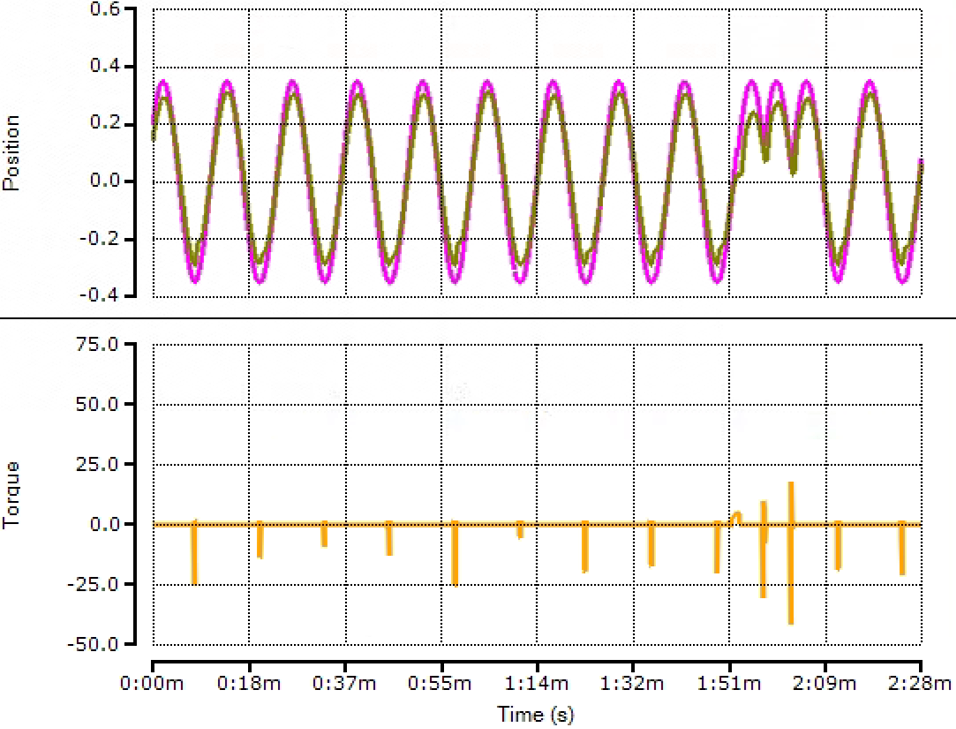
接下来分析阻尼的影响!!!