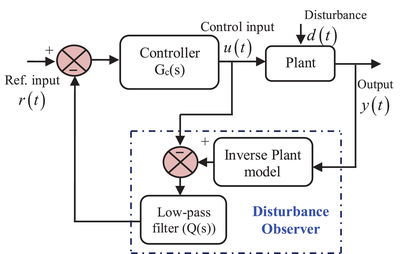
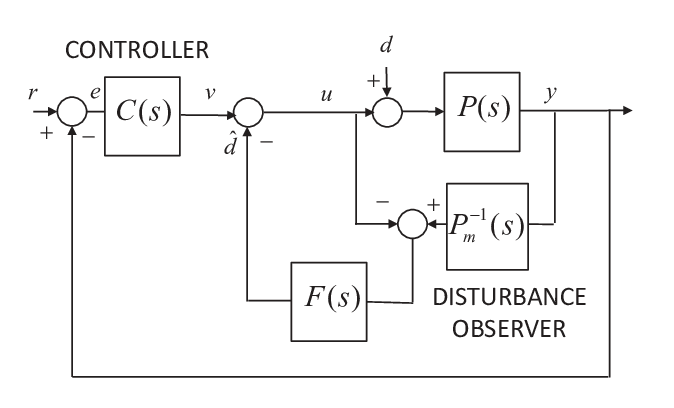
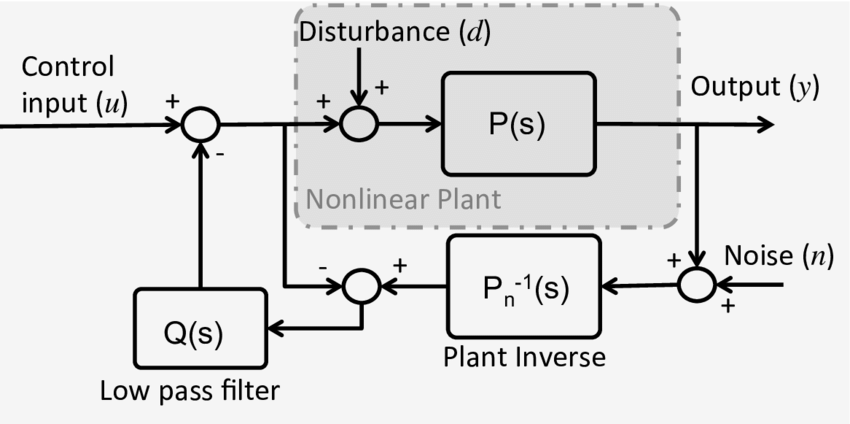
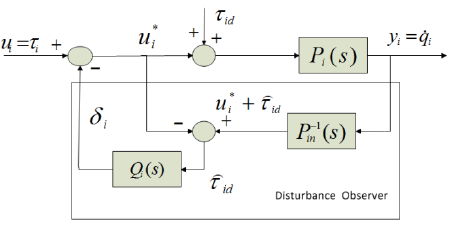
干扰观测器是将外部干扰以及模型参数变化造成的实际对象与名义模型之间的差异等效到控制输入端,即观测出等效干扰。并在控制中引入等效的补偿,实现对干扰的完全控制。

参考文献:
聊聊控制领域的干扰观测器(DOB) - 知乎1. 简介1987 年日本学者 K. Ohnishi 首次提出控制领域干扰观测器(Disturbance Observer,简称DOB)的概念(文献[1]),其核心思想是,将被控对象的实际输出与名义模型的输出间的差异作为等效干扰,并将其补偿到控…![]() https://zhuanlan.zhihu.com/p/504256899
https://zhuanlan.zhihu.com/p/504256899
![[Python从零到壹] 七十三.图像识别及经典案例篇之图像去雾ACE算法和暗通道先验去雾算法实现](https://img-blog.csdnimg.cn/139d1b6497224e069e1449a76536d36b.png#pic_center)