定理: 若系统能观测,且rankC=m,则系统的状态观测器的最小维数是(n-m)。
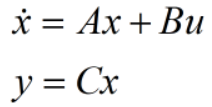
线性定常时不变系统方程如下(以三阶(n=3)单入单出系统为例,有m=rankC=1):
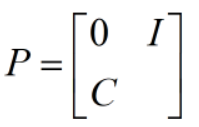
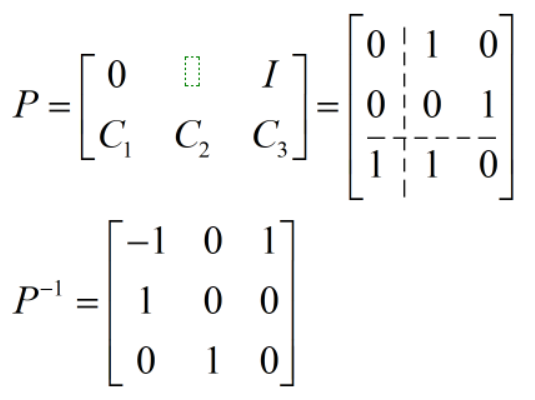
取变换阵P,有:
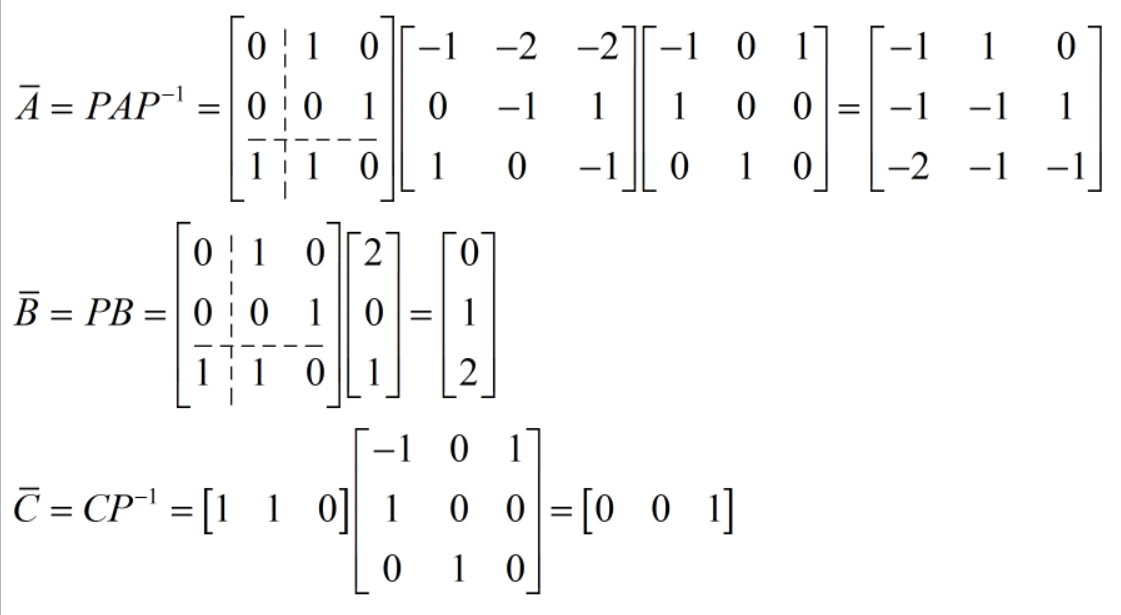
对上述系统方程进行线性变换,

得到如下形式:
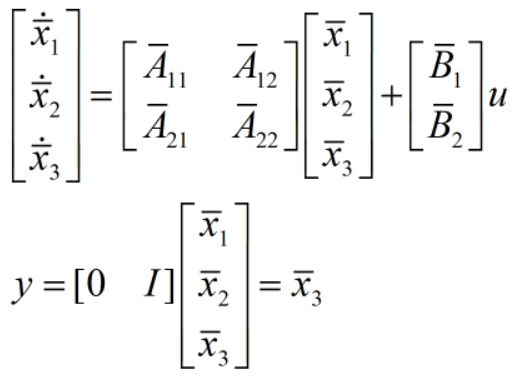
输出y直接给出![]() 。于是状态估计时,只需对 n-m=2 维的
。于是状态估计时,只需对 n-m=2 维的![]() 、
、 进行估计即可。这就是说,降阶观测器的维数为n-m=2。
进行估计即可。这就是说,降阶观测器的维数为n-m=2。
降阶观测器方程为:

只需要选择合适的G1阵,使得  所有的特征值具有期望的特征值即可。
所有的特征值具有期望的特征值即可。
举例如下:
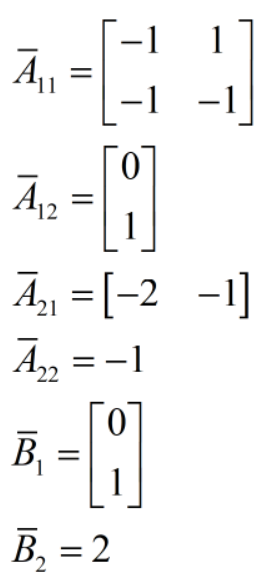
给定连续线性时不变系统:

试确定特征值为-3,-4的二维状态观测器。
解答:
先判断系统是否能观测:

故系统能观测。
选取变换阵P:
 可见状态变量
可见状态变量![]() 可由y直接提供。现只需要设计一个二阶状态观测器来估计
可由y直接提供。现只需要设计一个二阶状态观测器来估计![]() 即可。
即可。
设G1阵为:


则有:


期望的特征多项式为:

对照系数得:
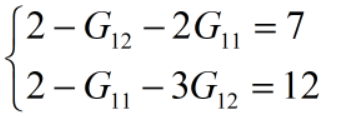
得到:

从而:

系统的二阶降维观测器为:
 其中:
其中: