文章目录
- 前言
- 一、雷达波形
- 二、Matlab 仿真
- 1、SFW 的距离分辨率和距离模糊
- ①、MATLAB 源码
- ②、仿真结果
- 三、资源自取
前言
本文对雷达波形的内容以思维导图的形式呈现,有关仿真部分进行了讲解实现。
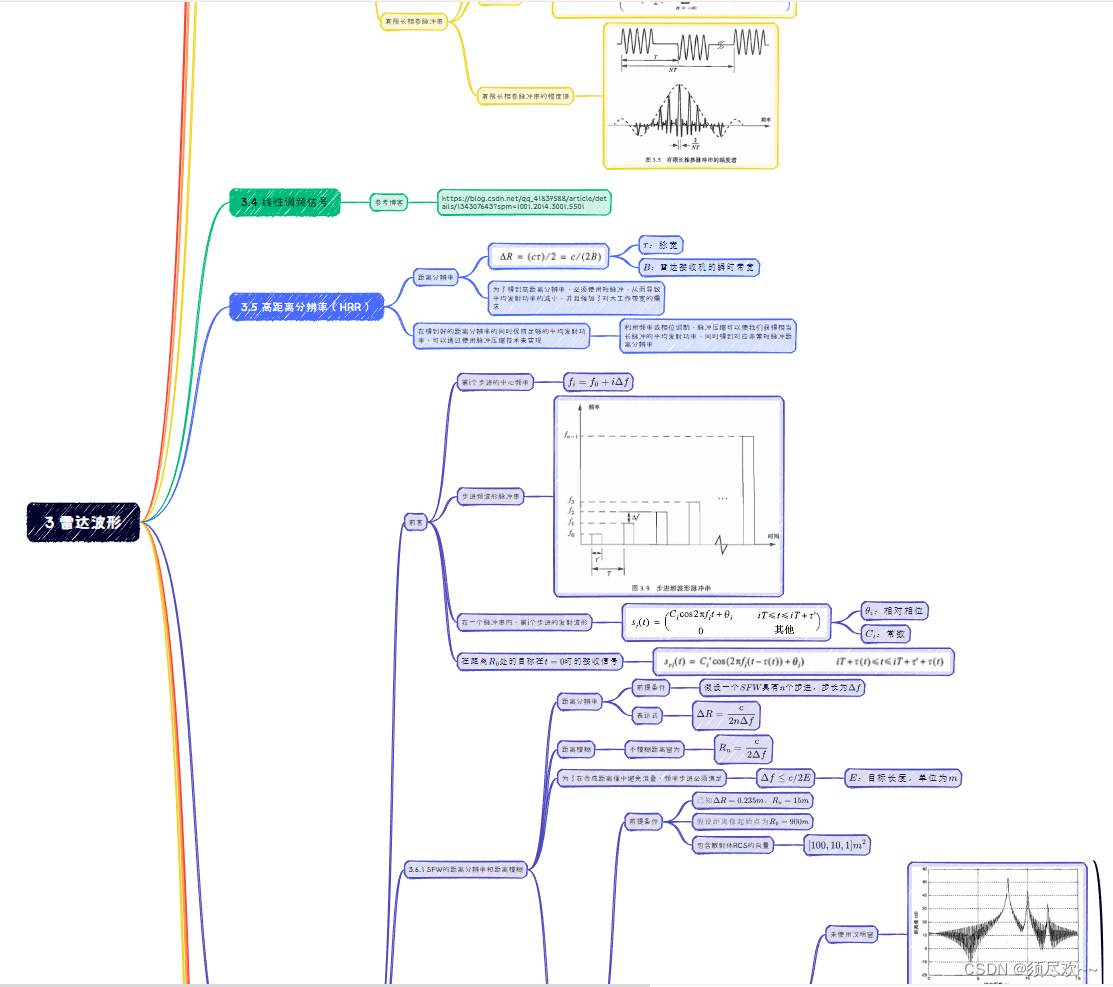
一、雷达波形
思维导图如下图所示,如有需求请到文章末尾端自取。
二、Matlab 仿真
1、SFW 的距离分辨率和距离模糊
距离分辨率 Δ R = c 2 n Δ f \Delta R=\large \frac{c}{2n\Delta f} ΔR=2nΔfc
不模糊距离窗为 R u = c 2 Δ f R_u=\large \frac{c}{2\Delta f} Ru=2Δfc
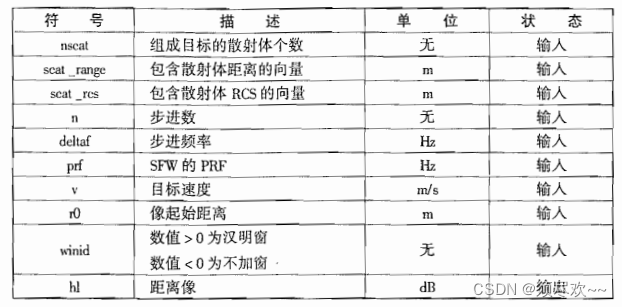
①、MATLAB 源码
hrr_profile.m
function [hl] = hrr_profile (nscat, scat_range, scat_rcs, n, deltaf, prf, v, rnote,winid)
% Range or Time domain Profile
% Range_Profile returns the Range or Time domain plot of a simulated
% HRR SFWF returning from a predetermined number of targets with a predetermined
% RCS for each target.
c=3.0e8; % speed of light (m/s)
num_pulses = n;
SNR_dB = 40;
nfft = 256;
%carrier_freq = 9.5e9; %Hz (10GHz)
freq_step = deltaf; %Hz (10MHz)
V = v; % radial velocity (m/s) -- (+)=towards radar (-)=away
PRI = 1. / prf; % (s)
if (nfft > 2*num_pulses)
num_pulses = nfft/2;
else
end
Inphase = zeros((2*num_pulses),1);
Quadrature = zeros((2*num_pulses),1);
Inphase_tgt = zeros(num_pulses,1);
Quadrature_tgt = zeros(num_pulses,1);
IQ_freq_domain = zeros((2*num_pulses),1);
Weighted_I_freq_domain = zeros((num_pulses),1);
Weighted_Q_freq_domain = zeros((num_pulses),1);
Weighted_IQ_time_domain = zeros((2*num_pulses),1);
Weighted_IQ_freq_domain = zeros((2*num_pulses),1);
abs_Weighted_IQ_time_domain = zeros((2*num_pulses),1);
dB_abs_Weighted_IQ_time_domain = zeros((2*num_pulses),1);
taur = 2. * rnote / c;
for jscat = 1:nscat
ii = 0;
for i = 1:num_pulses
ii = ii+1;
rec_freq = ((i-1)*freq_step);
Inphase_tgt(ii) = Inphase_tgt(ii) + sqrt(scat_rcs(jscat)) * cos(-2*pi*rec_freq*...
(2.*scat_range(jscat)/c - 2*(V/c)*((i-1)*PRI + taur/2 + 2*scat_range(jscat)/c)));
Quadrature_tgt(ii) = Quadrature_tgt(ii) + sqrt(scat_rcs(jscat))*sin(-2*pi*rec_freq*...
(2*scat_range(jscat)/c - 2*(V/c)*((i-1)*PRI + taur/2 + 2*scat_range(jscat)/c)));
end
end
if(winid >= 0)
window(1:num_pulses) = hamming(num_pulses);
else
window(1:num_pulses) = 1;
end
Inphase = Inphase_tgt;
Quadrature = Quadrature_tgt;
Weighted_I_freq_domain(1:num_pulses) = Inphase(1:num_pulses).* window';
Weighted_Q_freq_domain(1:num_pulses) = Quadrature(1:num_pulses).* window';
Weighted_IQ_freq_domain(1:num_pulses)= Weighted_I_freq_domain + ...
Weighted_Q_freq_domain*j;
Weighted_IQ_freq_domain(num_pulses:2*num_pulses)=0.+0.i;
Weighted_IQ_time_domain = (ifft(Weighted_IQ_freq_domain));
abs_Weighted_IQ_time_domain = (abs(Weighted_IQ_time_domain));
dB_abs_Weighted_IQ_time_domain = 20.0*log10(abs_Weighted_IQ_time_domain)+SNR_dB;
% calculate the unambiguous range window size
Ru = c /2/deltaf;
hl = dB_abs_Weighted_IQ_time_domain;
numb = 2*num_pulses;
delx_meter = Ru / numb;
xmeter = 0:delx_meter:Ru-delx_meter;
plot(xmeter, dB_abs_Weighted_IQ_time_domain,'k')
xlabel ('relative distance - meters')
ylabel ('Range profile - dB')
grid
例如,假设距离像起始点为
R
0
=
912
m
R_0=912m
R0=912m 处,RCS 为
σ
=
10
m
2
\sigma=10m^2
σ=10m2,
v
=
15
m
/
s
v=15m/s
v=15m/s 的运动目标的合成距离像
fig3_17.m
clear all
close all
nscat = 1;
scat_range = 912;
scat_rcs = 10;
n =64;
deltaf = 10e6;
prf = 10e3;
v = 15;
rnote = 900,
winid = 1;
count = 0;
for time = 0:.05:3
count = count +1;
hl = hrr_profile (nscat, scat_range, scat_rcs, n, deltaf, prf, v, rnote,winid);
array(count,:) = transpose(hl);
hl(1:end) = 0;
scat_range = scat_range - 2 * n * v / prf;
end
figure (1)
numb = 2*256;% this number matches that used in hrr_profile.
delx_meter = 15 / numb;
xmeter = 0:delx_meter:15-delx_meter;
imagesc(xmeter, 0:0.05:4,array)
colormap(gray)
ylabel ('Time in seconds')
②、仿真结果

三、资源自取
雷达波形相关知识点思维导图笔记
我的qq:2442391036,欢迎交流!







![[工业自动化-19]:西门子S7-15xxx编程 - 软件编程 - PLC程序块、组织块OB与PLC多线程原理、OB、FC、FB、DB](https://img-blog.csdnimg.cn/6af0e1ae7b2b4c1ba5e5b12d4d5e24bf.png)