1. 串口编程步骤
1.1 看原理图确定引脚
-
有很多串口,使用哪一个?看原理图确定
1.2 配置引脚为UART功能
-
至少用到发送、接收引脚:txd、rxd
-
需要把这些引脚配置为UART功能,并使能UART模块
1.3 设置串口参数
-
有哪些参数?
-
波特率
-
数据位
-
校验位
-
停止位
-
-
示例: 比如
15200,8n1表示波特率为115200,8个数据为,没有校验位,1个停止位
1.4 根据状态寄存器读写数据
-
肯定有一个数据寄存器,程序把数据写入,即刻通过串口向外发送数据
-
肯定有一个数据寄存器,程序读取这个寄存器,就可以获得先前接收到的数据
-
很多有状态寄存器
-
判断数据是否发送出去?是否发送成功?
-
判断是否接收到了数据?
-
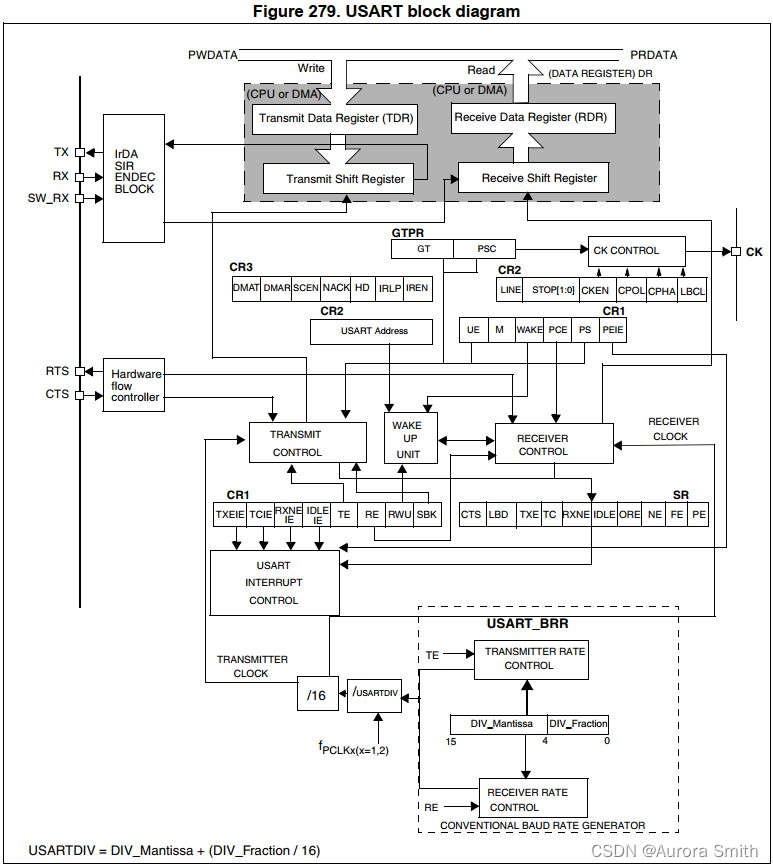
2. STM32F103串口框架
各类芯片的UART框图都是类似的,当设置好UART后,程序读写数据寄存器就可以接收、发送数据了。
3. STM32F103串口操作
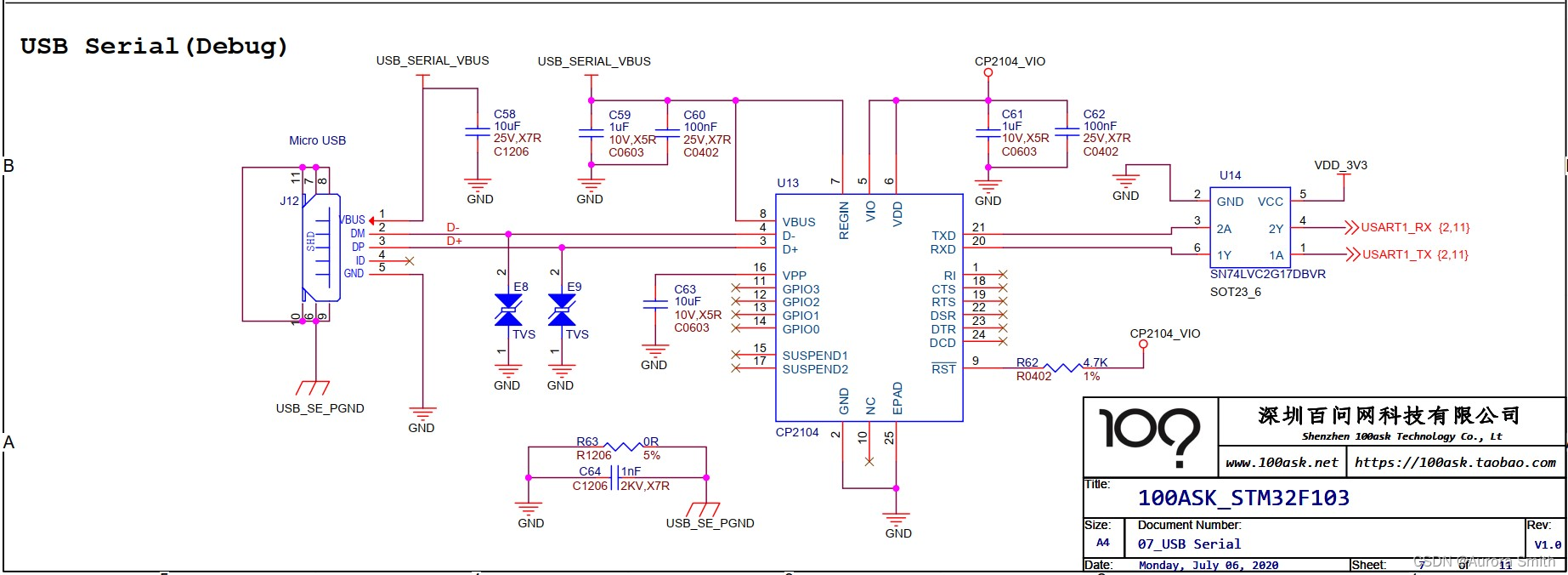
3.1 看原理图确定引脚
-
100ASM STM32F103的USART1接到一个USB串口芯片,然后就可以通过USB线连接电脑了
-
原理图如下
-
上图中的USART1_RX、USART1_TX,接到了PA9、PA10

3.2 配置引脚为UART功能
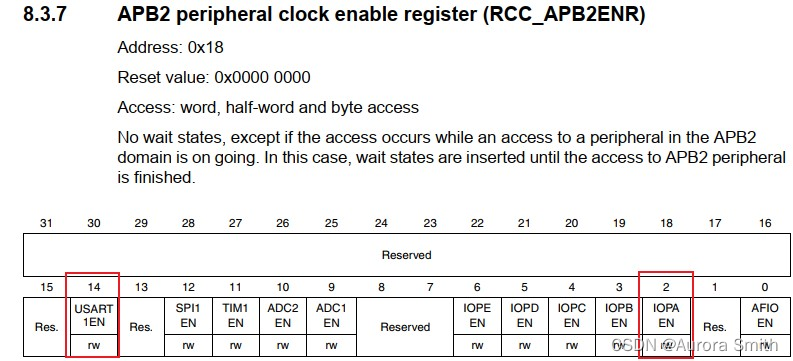
3.2.1 使能GPIOA/USART1模块
需要设置GPIOA的寄存器,选择引脚功能:所以要使能GPIOA模块。 GPIOA模块、USART1模块的使能都是在同一个寄存器里实现。
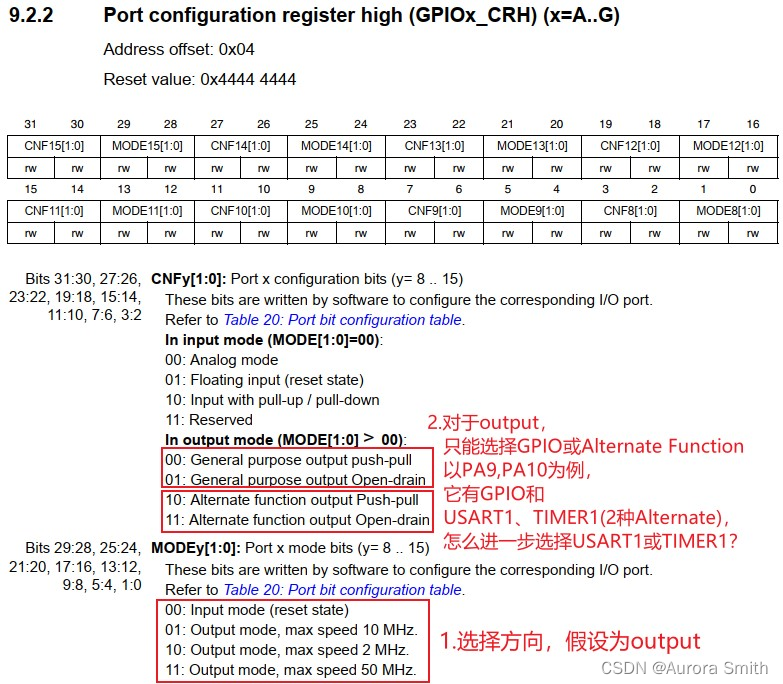
 3.2.2 配置引脚功能
3.2.2 配置引脚功能
从上图可以知道,PA9、PA10有三种功能:GPIO、USART1、TIMER1。
 3.3 设置串口参数
3.3 设置串口参数
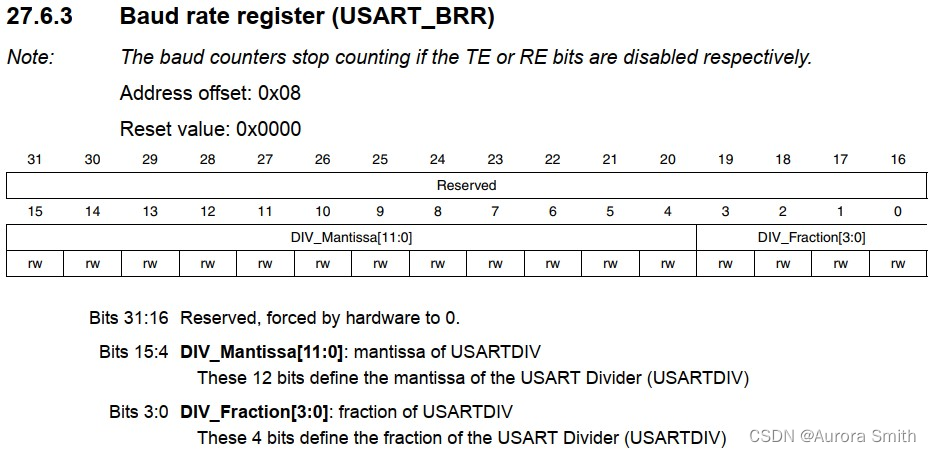
3.3.1 设置波特率
波特率算公式:
 USARTDIV由整数部分、小数部分组成,计算公式如下:
USARTDIV由整数部分、小数部分组成,计算公式如下: USARTDIV = DIV_Mantissa + (DIV_Fraction / 16) DIV_Mantissa和DIV_Fraction来自USART_BRR寄存器,如下图:
 3.3.2 设置数据格式
3.3.2 设置数据格式
比如数据位设置为8,无校验位,停止位设置为1。 需要设置2个寄存器。
-
USART1_CR1:用来设置数据位、校验位,使能USART
-
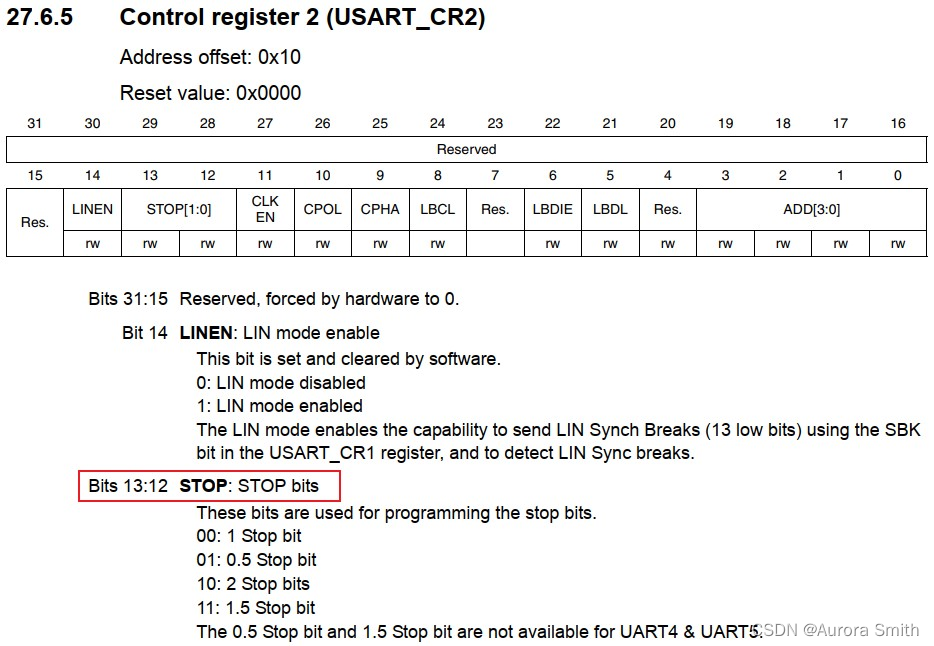
 USART_CR2:用来设置停止位
USART_CR2:用来设置停止位
3.4 根据状态寄存器读写数据
-
状态寄存器
-
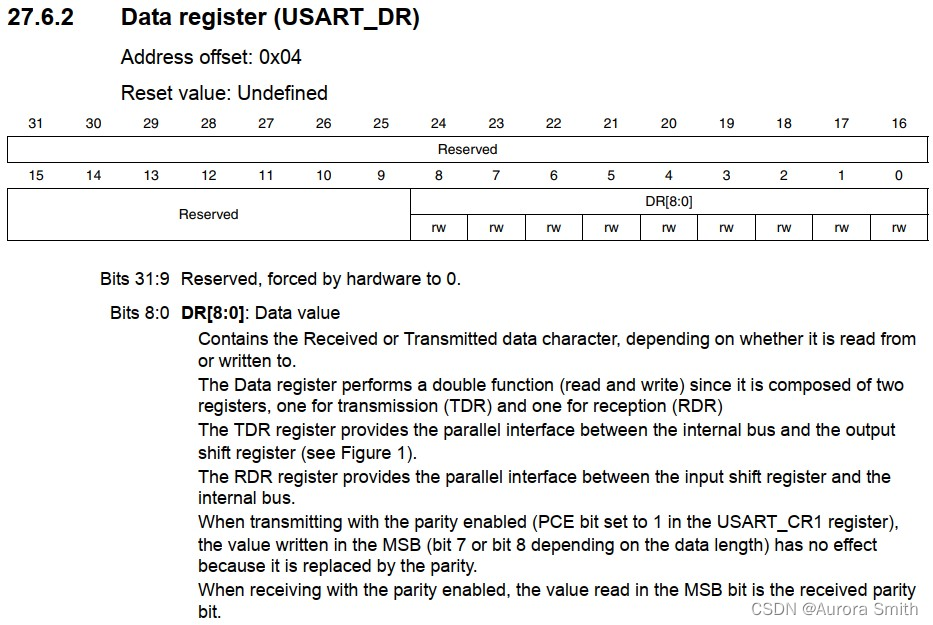
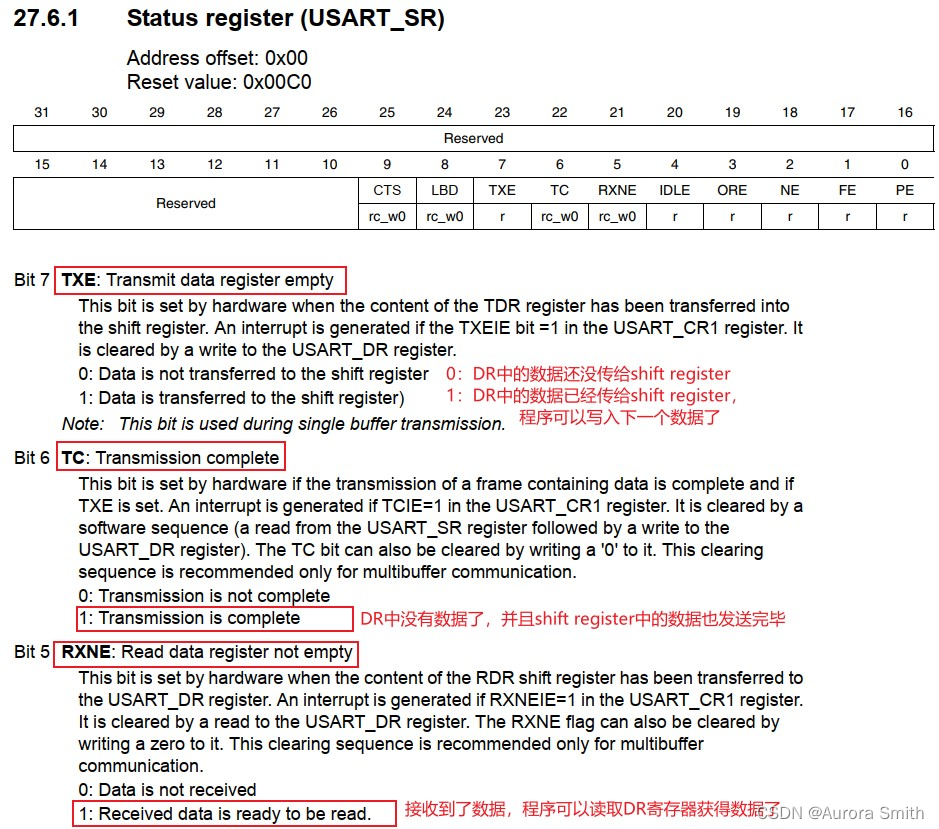 数据寄存器 写、读这个寄存器,就可:发送、读取串口数据,如下图:
数据寄存器 写、读这个寄存器,就可:发送、读取串口数据,如下图:
 3.5 USART1的寄存器地址
3.5 USART1的寄存器地址
-
基地址
-
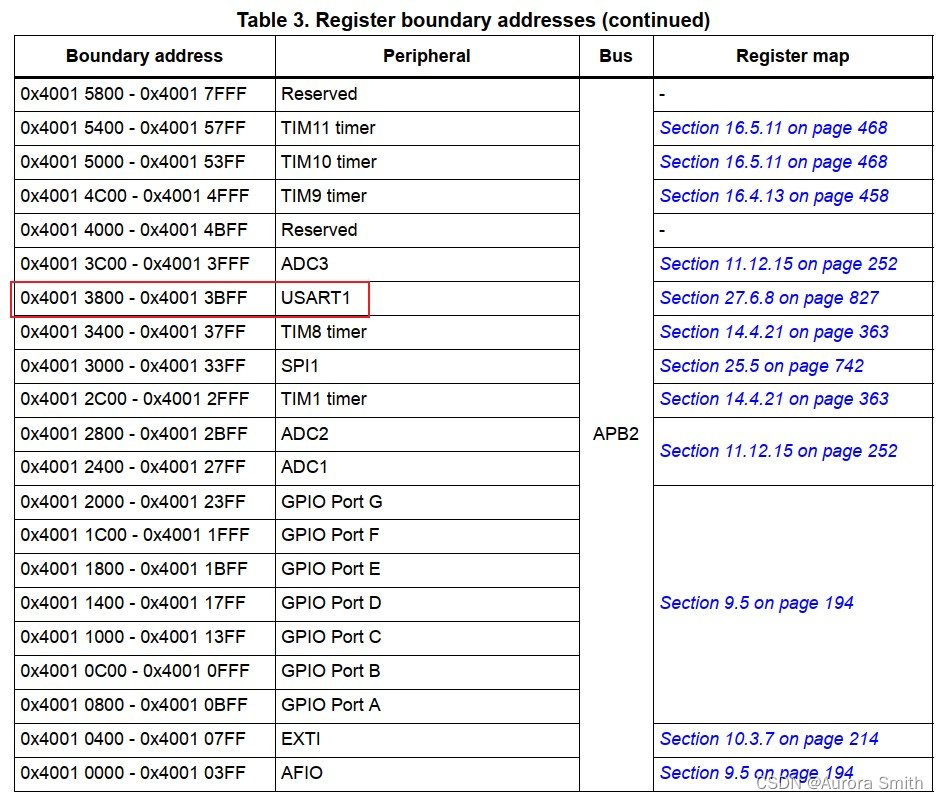 USART寄存器 用结构体来表示比较方便:
USART寄存器 用结构体来表示比较方便:typedef unsigned int uint32_t; typedef struct { volatile uint32_t SR; /*!< USART Status register, Address offset: 0x00 */ volatile uint32_t DR; /*!< USART Data register, Address offset: 0x04 */ volatile uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */ volatile uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */ volatile uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */ volatile uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */ volatile uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */ } USART_TypeDef; USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
4. 写程序
uart.h
#ifndef _UART_H_
#define _UART_H_
typedef unsigned int uint32_t;
typedef struct
{
volatile uint32_t SR; /*!< USART Status register, Address offset: 0x00 */
volatile uint32_t DR; /*!< USART Data register, Address offset: 0x04 */
volatile uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */
volatile uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */
volatile uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */
volatile uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */
volatile uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */
} USART_TypeDef;
void uart_init(void);
char getchar(void);
void putchar(char c);
#endif
uart.c
#include "uart.h"
void uart_init(void)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
//使能GPIOA/USART1模块
unsigned int *pRcc = (unsigned int *)(0x40021000 + 0x18);
*pRcc |= (1<<2);
pRcc = (unsigned int *)(0x40021000 + 0x18);
*pRcc |= (1<<14);
//配置引脚功能
unsigned int *pMode = (unsigned int *)(0x40010800 + 0x04);
*pMode &= ~((3<<4) | (3<<6));//PA9 -TX
*pMode |= (1<<4) | (2<<6);
*pMode &= ~((3<<8) | (3<<10));//PA10 -RX
*pMode |= (0<<8) | (1<<10);
/*设置波特率
* 115200 = 8000000/16/USARTDIV
* USARTDIV = 4.34
* DIV_Mantissa = 4
* DIV_Fraction / 16 = 0.34
* DIV_Fraction = 16 * 0.34 = 5
* 真实波特率:
* DIV_Fraction / 16 = 5 / 16 = 0.3125
* USARTDIV = DIV_Mantissa + DIV_Fraction / 16 = 4.3125
* baudrate = 8000000/16/4.3125 = 115942
*/
#define DIV_Mantissa 4
#define DIV_Fraction 5
usart1 -> BRR = (DIV_Mantissa << 4) | (5);
//设置数据格式
usart1 -> CR1 = (1 << 13) | (0 << 12) | (0 << 10) | (1 << 3) | (1 << 2);
usart1 -> CR2 &= ~(0x11 << 12); //1位停止位
//使能USART1
//在配置CR1时已经使能tx,rx
}
char getchar(void)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while((usart1 -> SR & (1 << 5)) == 0);//出来循环就是有数据
return usart1 -> DR;
}
void putchar(char c)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while((usart1 -> SR & (1 << 7)) == 0);//出来循环就是发送成功
usart1 -> DR = c;
}
main.c
#include "uart.h"
void delay(int time)
{
while(time --);
}
int main()
{
uart_init();
char c;
putchar('1');
putchar('0');
putchar('0');
putchar('a');
putchar('s');
putchar('k');
putchar('\n');
putchar('\r');
while(1)
{
c = getchar();
putchar(c);
putchar(c+1);
}
}
测试结果: