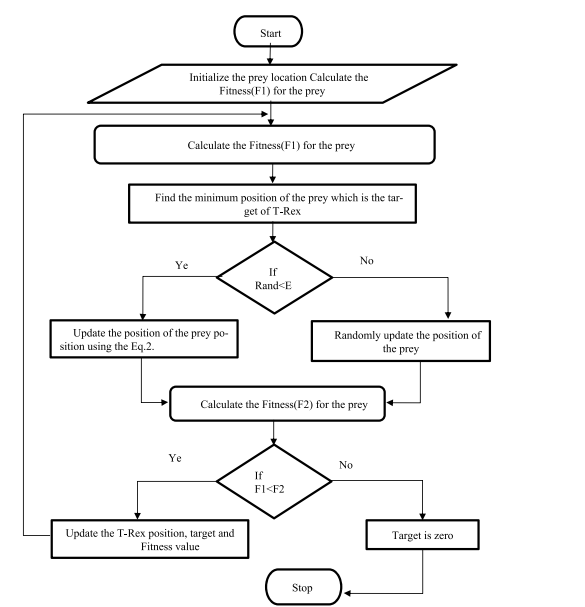
一、霸王龙优化算法
霸王龙优化算法(Tyrannosaurus optimization,TROA)由Venkata Satya Durga Manohar Sahu等人于2023年提出,该算法模拟霸王龙的狩猎行为,具有搜索速度快等优势。

参考文献:
[1]Venkata Satya Durga Manohar Sahu, Padarbinda Samal, Chinmoy Kumar Panigrahi,”Tyrannosaurus optimization algorithm: A new nature-inspired meta-heuristic algorithm for solving optimal control problems”,e-Prime - Advances in Electrical Engineering, Electronics and Energy,Volume 5,2023,100243,ISSN 2772-6711,https://doi.org/10.1016/j.prime.2023.100243.
二、多目标霸王龙优化算法MOTROA
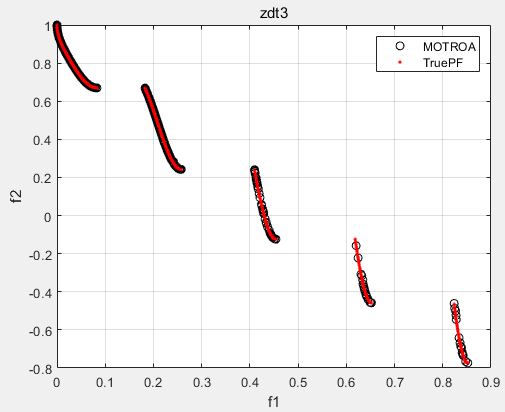
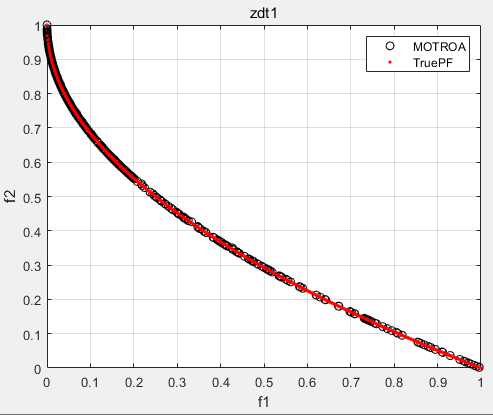
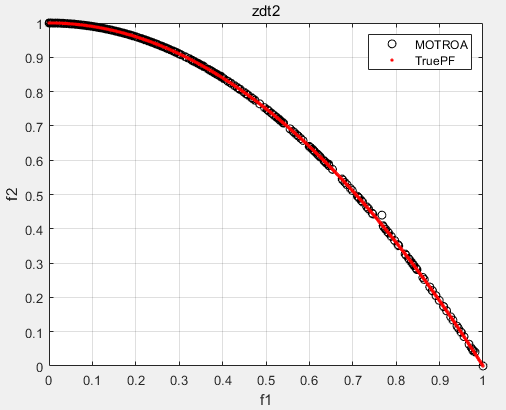
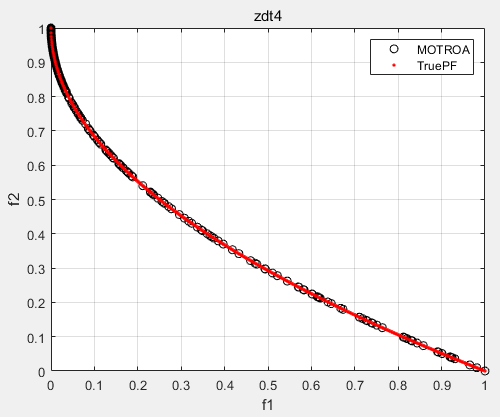
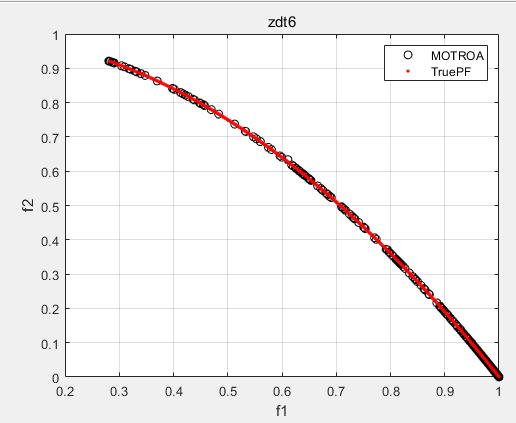
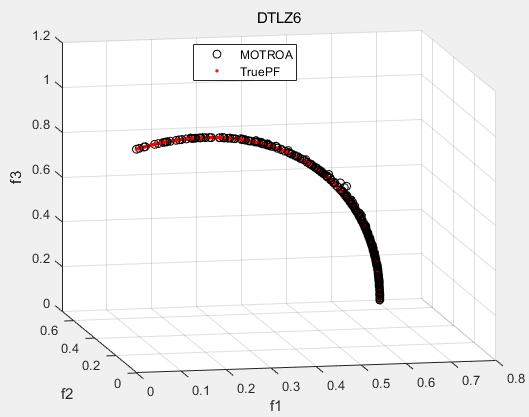
多目标霸王龙优化算法(Multi-Objective Tyrannosaurus optimization,MOTROA)由霸王龙优化算法融合多目标策略而成。将MOTROA用于求解46个多目标测试函数(ZDT1、ZDT2、ZDT3、ZDT4、ZDT6、DTLZ1-DTLZ7、WFG1-WFG10、UF1-UF10、CF1-CF10、Kursawe、Poloni、Viennet2、Viennet3)以及1个工程应用(盘式制动器设计),并采用IGD、GD、HV、SP进行评价。
(1)部分代码
close all;
clear ;
clc;
%%
% TestProblem测试问题说明:
%一共46个多目标测试函数(1-46)+1个工程应用(47),详情如下:
%1-5:ZDT1、ZDT2、ZDT3、ZDT4、ZDT6
%6-12:DTLZ1-DTLZ7
%13-22:wfg1-wfg10
%23-32:uf1-uf10
%33-42:cf1-cf10
%43-46:Kursawe、Poloni、Viennet2、Viennet3
%47 盘式制动器设计 https://blog.csdn.net/weixin_46204734/article/details/124051747
%%
TestProblem=3;%1-47
MultiObj = GetFunInfo(TestProblem);
MultiObjFnc=MultiObj.name;%问题名
% Parameters
params.Np = 100; % 种群大小
params.Nr = 300; % 外部存档中最大数目,可适当调整大小,越大,最终获得的解数目越多 (特别注意:params.Nr 不得小于params.Np)
params.maxgen =300; % 最大迭代次数
REP = MOTROA(params,MultiObj);
%% 画结果图
figure
if(size(REP.pos_fit,2)==2)
h_rep = plot(REP.pos_fit(:,1),REP.pos_fit(:,2),'ok'); hold on;
if(isfield(MultiObj,'truePF'))
h_pf = plot(MultiObj.truePF(:,1),MultiObj.truePF(:,2),'.r'); hold on;
legend('MOTROA','TruePF');
else
legend('MOTROA');
end
grid on; xlabel('f1'); ylabel('f2');
end
if(size(REP.pos_fit,2)==3)
h_rep = plot3(REP.pos_fit(:,1),REP.pos_fit(:,2),REP.pos_fit(:,3),'ok'); hold on;
if(isfield(MultiObj,'truePF'))
h_pf = plot3(MultiObj.truePF(:,1),MultiObj.truePF(:,2),MultiObj.truePF(:,3),'.r'); hold on;
legend('MOTROA','TruePF');
else
legend('MOTROA');
end
grid on; xlabel('f1'); ylabel('f2'); zlabel('f3');
end
title(MultiObjFnc)
%% 求解结果 bestX bestF
bestX=REP.pos;%POX
bestF=REP.pos_fit;%POF
save([MultiObjFnc '-bestX.txt'],'bestX','-ascii')
save([MultiObjFnc '-bestF.txt'],'bestF','-ascii')
%% 计算评价指标IGD、GD、HV、Spacing
Obtained_Pareto=REP.pos_fit;
if(isfield(MultiObj,'truePF'))%判断是否有参考的PF
True_Pareto=MultiObj.truePF;
%% Metric Value
% ResultData的值分别是IGD、GD、HV、Spacing (HV越大越好,其他指标越小越好)
ResultData=[IGD(Obtained_Pareto,True_Pareto),GD(Obtained_Pareto,True_Pareto),HV(Obtained_Pareto,True_Pareto),Spacing(Obtained_Pareto)];
else
%计算每个算法的Spacing,Spacing越小说明解集分布越均匀
ResultData=Spacing(Obtained_Pareto);%计算的Spacing
end
save([MultiObjFnc '-MetricValue.txt'],'ResultData','-ascii')%保存评价指标的值
%%
% Display info
disp('Repository fitness values are stored in bestF');
disp('Repository particles positions are store in bestX');
(2)部分结果

三、完整MATLAB代码

![[MICROSAR Adaptive] --- autosar官方文档阅读建议](https://img-blog.csdnimg.cn/8f9aabc4a95249f29316b1723535c395.png)



![[原创]Cadence17.4,win64系统,构建CIS库](https://img-blog.csdnimg.cn/3800958cf6174a19bdec33d4576ba5ae.png)