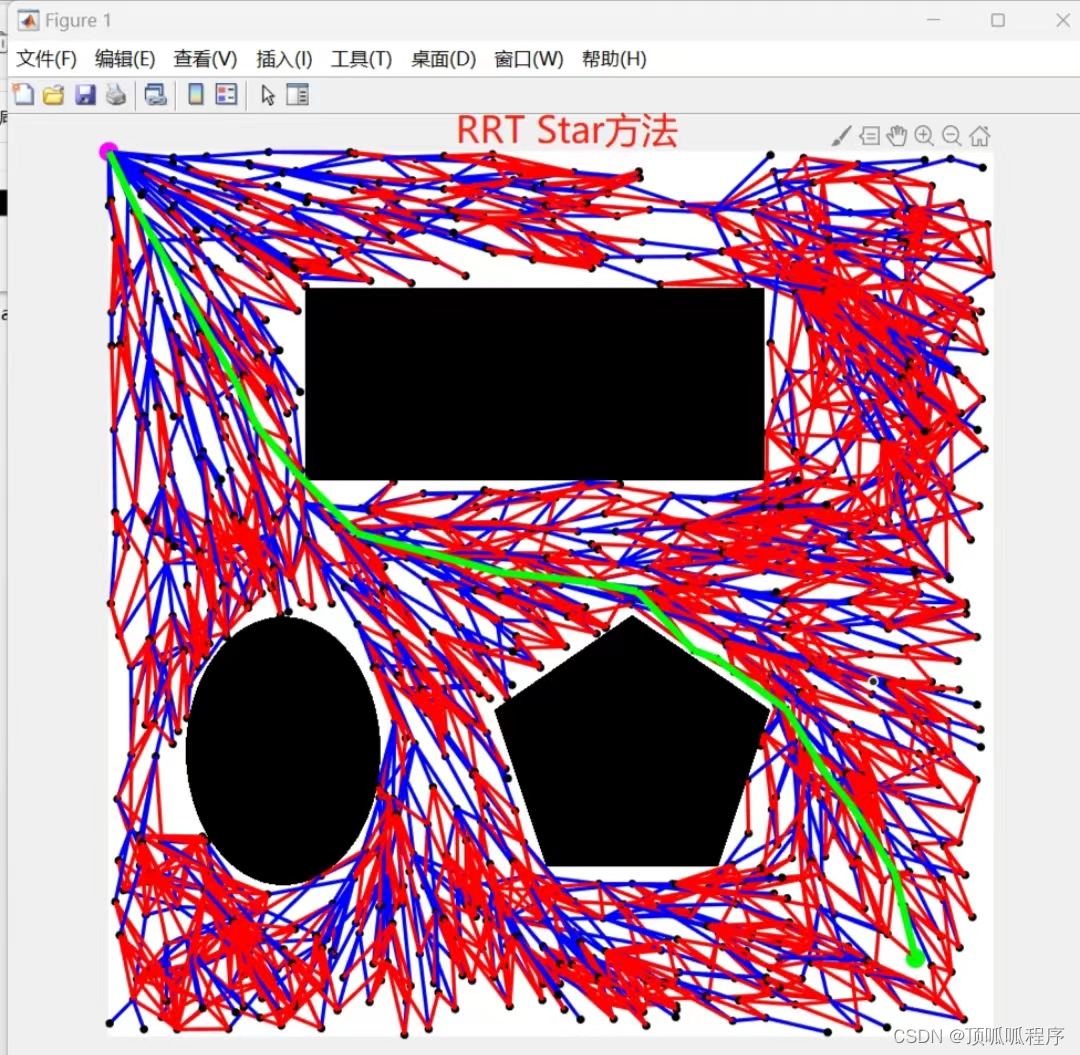
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法,RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通。
39matlab全局路径规划算法 (xiaohongshu.com)![]() https://www.xiaohongshu.com/explore/653e76a70000000025021b7a
https://www.xiaohongshu.com/explore/653e76a70000000025021b7a
![[ASP]青辰网络考试管理系统NES X3.5](https://img-blog.csdnimg.cn/96f81143a4454aea8a37adcedd40540a.png)







![2023年中国无人机环保监测产业链及市场规模分析[图]](https://img-blog.csdnimg.cn/img_convert/84a05af5f04d8a585eb10ae21bf7d0a7.png)