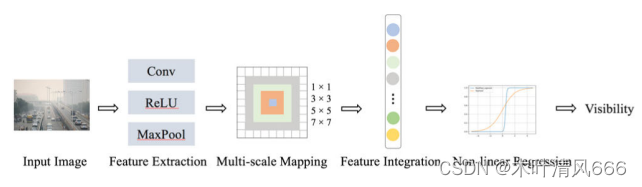
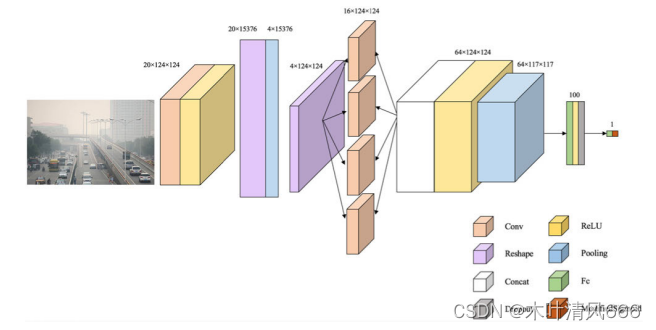
An End-to-End Traffic Visibility Regression Algorithm 文章通过训练搜集得到的真实道路图像数据集(Actual Road dense image Dataset, ARD),通过专业的能见度计和多人标注,获得可靠的能见度标签数据集。构建网络,进行训练,获得了较好的能见度识别网络。网络包括特征提取、多尺度映射、特征融合、非线性输出(回归范围为[0,1],需要经过(0,0),(1,1)改用修改的sigmoid函数,相较于ReLU更好)。结构如下
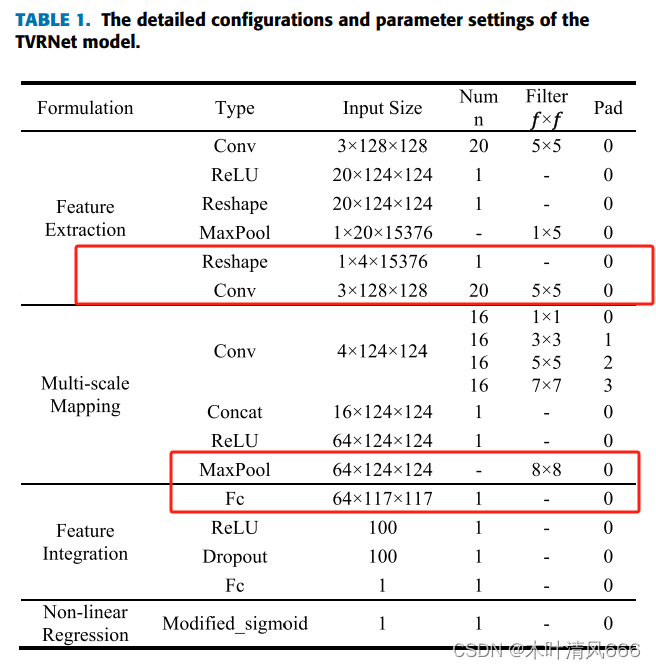
我认为红框位置与之相应的参数不匹配,在Feature Extraction部分Reshape之后得到的特征图大小为4124 124。紧接着接了一个卷积层Conv,显示输入是3128 128 第二处红框,MaxPool的kernel设置为88,特征图没有进行padding,到全连接层的输入变为64 117*117,参数不对应 """
Based on the ideas of the below paper, using PyTorch to build TVRNet.
Reference: Qin H, Qin H. An end-to-end traffic visibility regression algorithm[J]. IEEE Access, 2021, 10: 25448-25454.
@weishuo
"""
import torch
from torch import nn
import math
class Inception ( nn. Module) :
def __init__ ( self, in_planes, out_planes) :
super ( Inception, self) . __init__( )
self. conv1 = nn. Conv2d( in_planes, out_planes, kernel_size= 1 , padding= 0 )
self. conv3 = nn. Conv2d( in_planes, out_planes, kernel_size= 3 , padding= 1 )
self. conv5 = nn. Conv2d( in_planes, out_planes, kernel_size= 5 , padding= 2 )
self. conv7 = nn. Conv2d( in_planes, out_planes, kernel_size= 7 , padding= 3 )
def forward ( self, x) :
out_1 = self. conv1( x)
out_3 = self. conv3( x)
out_5 = self. conv5( x)
out_7 = self. conv7( x)
out = torch. cat( ( out_1, out_3, out_5, out_7) , dim= 1 )
return out
def modify_sigmoid ( x) :
return 1 / ( 1 + torch. exp( - 10 * ( x- 0.5 ) ) )
class TVRNet ( nn. Module) :
def __init__ ( self, in_planes, out_planes) :
super ( TVRNet, self) . __init__( )
self. FeatureExtraction_onestep = nn. Sequential( nn. Conv2d( in_planes, 20 , kernel_size= 5 , padding= 0 ) ,
nn. ReLU( inplace= True ) , )
self. FeatureExtraction_maxpool = nn. MaxPool2d( ( 5 , 1 ) )
self. MultiScaleMapping = nn. Sequential( Inception( 4 , 16 ) ,
nn. ReLU( inplace= True ) ,
nn. MaxPool2d( kernel_size= 8 ) )
self. FeatureIntegration = nn. Sequential( nn. Linear( 46656 , 100 ) ,
nn. ReLU( inplace= True ) ,
nn. Dropout( 0.4 ) ,
nn. Linear( 100 , out_planes) )
self. NonLinearRegression = modify_sigmoid
def forward ( self, x) :
x = self. FeatureExtraction_onestep( x)
x = x. view( ( x. shape[ 0 ] , 1 , x. shape[ 1 ] , - 1 ) )
x = self. FeatureExtraction_maxpool( x)
x = x. view( x. shape[ 0 ] , x. shape[ 2 ] , int ( math. sqrt( x. shape[ 3 ] ) ) , int ( math. sqrt( x. shape[ 3 ] ) ) )
x = self. MultiScaleMapping( x)
x = x. view( x. shape[ 0 ] , - 1 )
x = self. FeatureIntegration( x)
out = self. NonLinearRegression( x)
return out
if __name__ == '__main__' :
a = torch. randn( 1 , 3 , 224 , 224 )
net = TVRNet( 3 , 3 )
b = net( a)
print ( b. shape)