STM32 HAL高级定时器正交编码模式案例
- 🔖基于stm32F030RBT6单片机采用高级定时器1,编码器模式,测试EC11编码器。
-
🎬EC11测试效果:

-
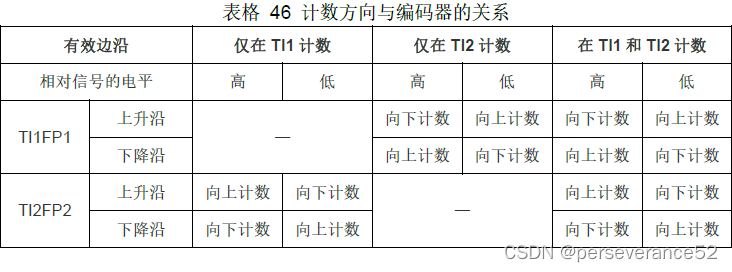
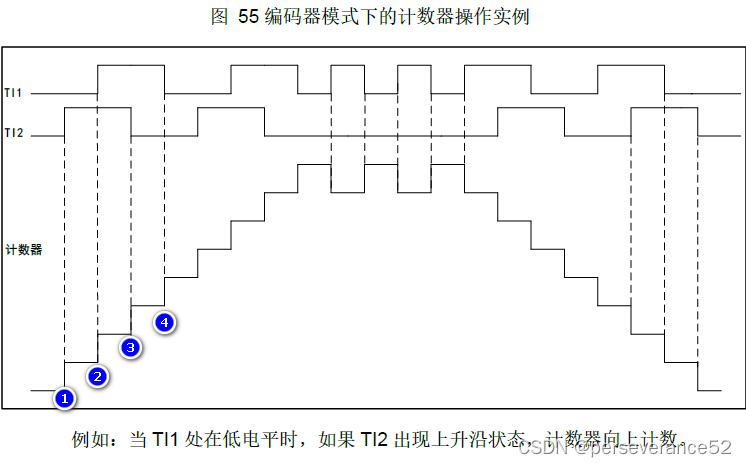
🌿STM32定时器编码器有3种映射模式:

- ✨本次采用的是上面的模式3,EC11编码器每转动一小格,TIM1定时器可以捕获到4个脉冲信号,也就是定时器捕获4个脉冲信号就代表编码器旋转了一小格。
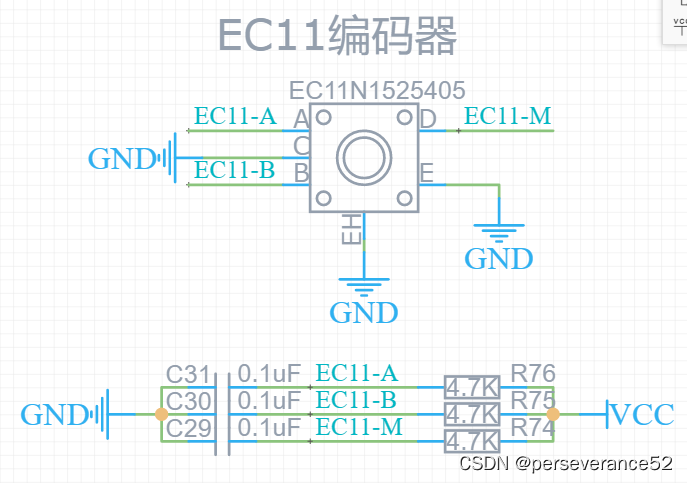
- 🌿EC11编码器原理图
🛠STM32CubeMX配置
-
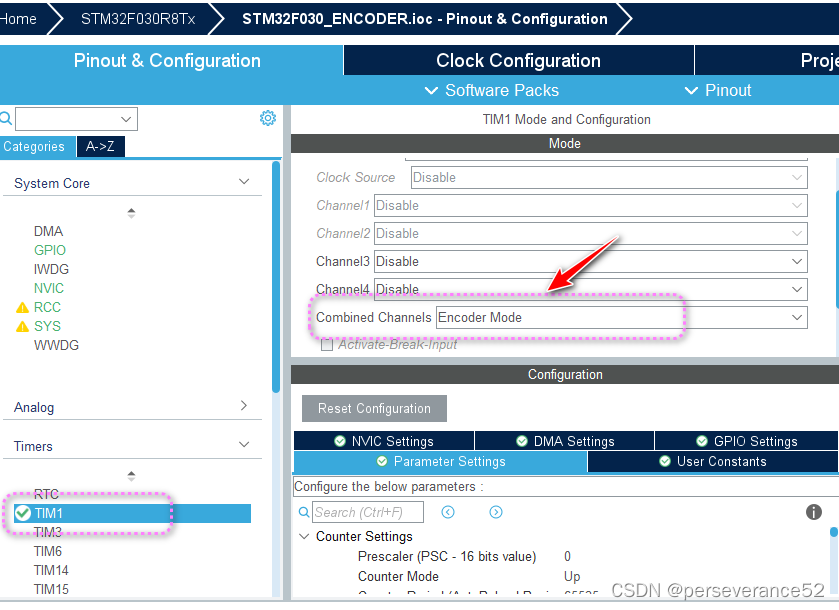
🌿使能高级定时器TIM1,配置编码器模式。
-
🔧参数配置
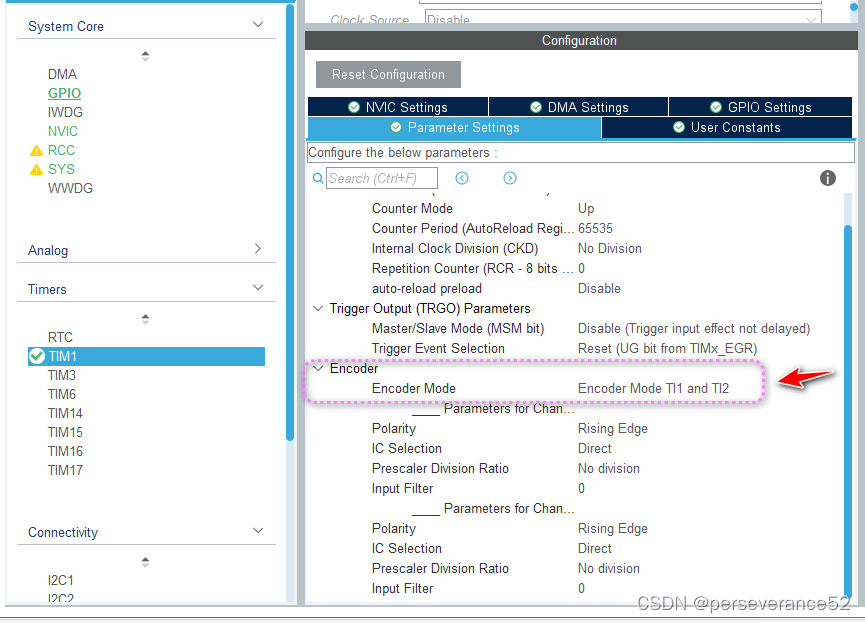
-
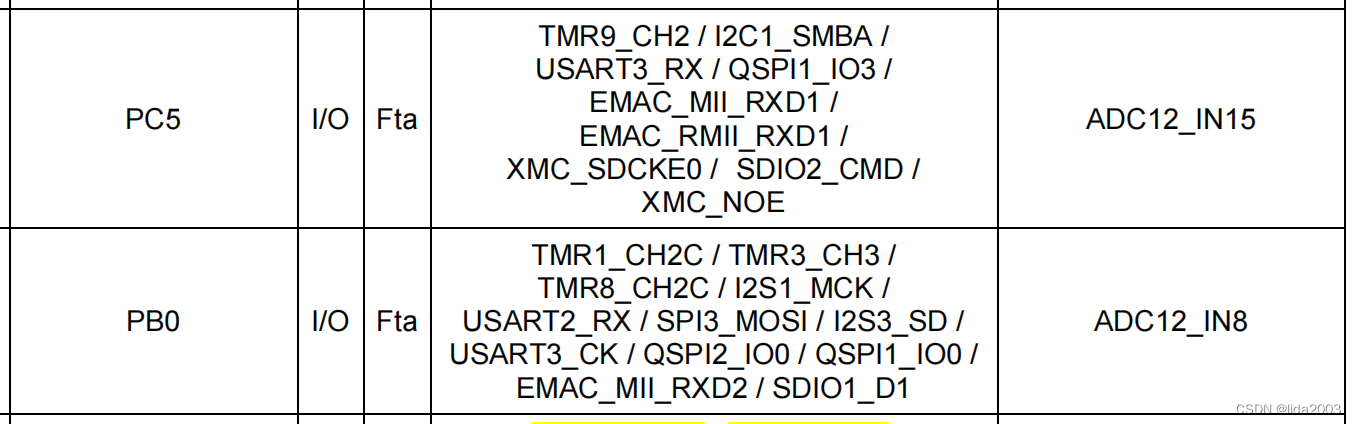
🌿编码器引脚配置:
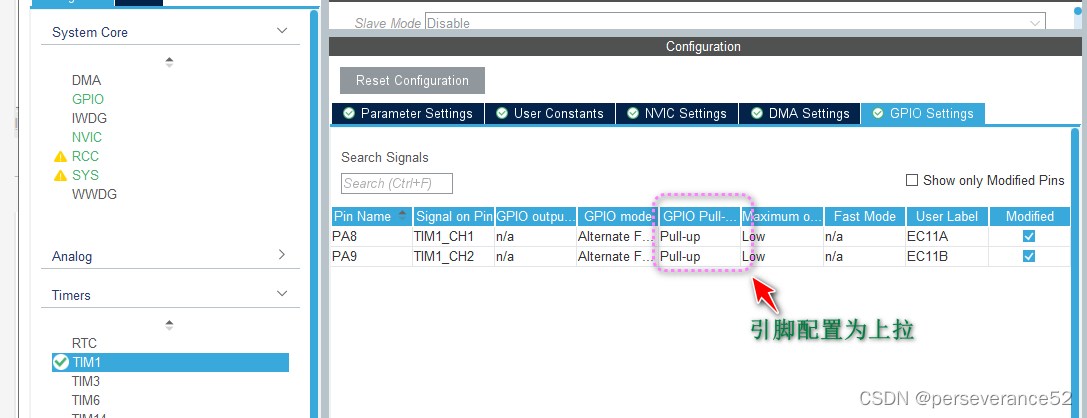
-
🌿EC11编码器按键引脚配置
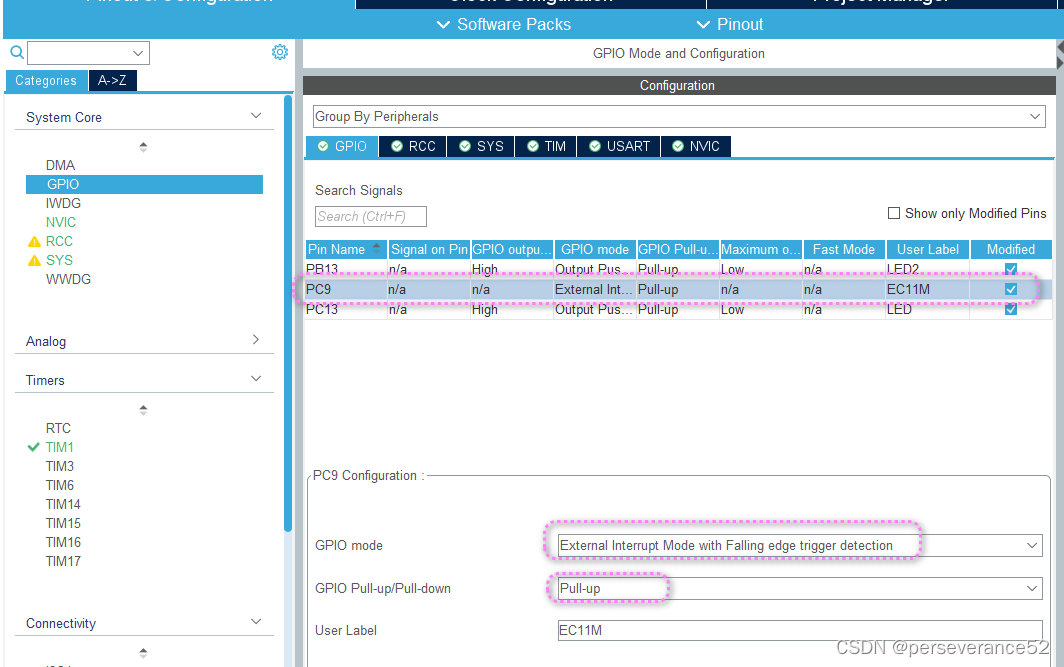
-
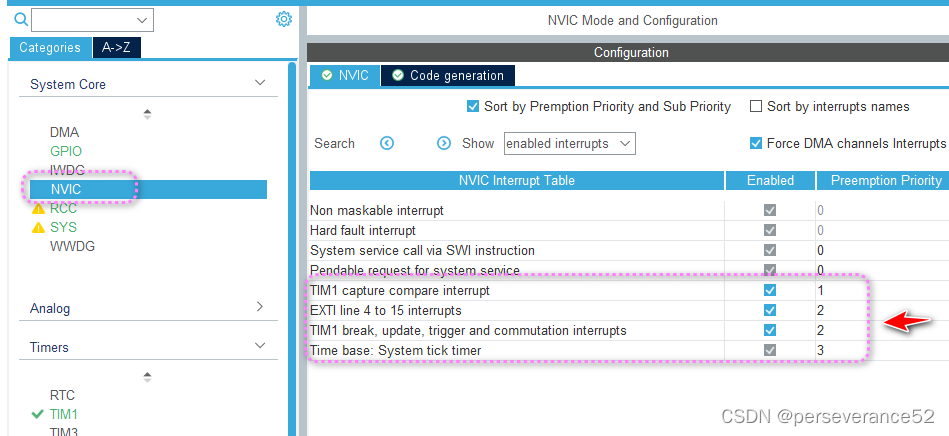
🌿中断配置
📓功能代码实现部分
- 📝中断回调部分
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef* htim)
{
if(htim == &htim1)
{
__HAL_TIM_CLEAR_IT(htim, TIM_FLAG_TRIGGER);//清除中断标志位
if(__HAL_TIM_GET_FLAG(htim, TIM_CHANNEL_1) != RESET)
{
Trg++;
}
if(__HAL_TIM_GET_FLAG(htim, TIM_CHANNEL_2) != RESET)
{
Trg++;
}
if((++Trg)==4)
{
Trg %=4;
CaptureNum = __HAL_TIM_GET_COUNTER(&htim1) / 4;
}
}
}
/**
* @brief 更新溢出回调函数
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
__HAL_TIM_CLEAR_IT(htim, TIM_FLAG_UPDATE);//清除更新中断标志位
}
void EXTI4_15_IRQHandler(void)
{
/* USER CODE BEGIN EXTI4_15_IRQn 0 */
/* USER CODE END EXTI4_15_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(EC11M_Pin);
/* USER CODE BEGIN EXTI4_15_IRQn 1 */
// 清除中断标志位
__HAL_GPIO_EXTI_CLEAR_IT(EC11M_Pin);
// 调用外部中断回调函数
HAL_GPIO_EXTI_Callback(EC11M_Pin);
/* USER CODE END EXTI4_15_IRQn 1 */
}
//重写外部中断回调函数EC11按键清零计数值
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/*判断是中断引脚*/
if(GPIO_Pin == EC11M_Pin)
{
__HAL_TIM_SET_COUNTER(&htim1, 0);
}
}
- 📑main函数代码
int main(void)
{
/* USER CODE BEGIN 1 */
uint32_t TimerUART;
uint32_t Temp;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
// HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL);//查询方式
__HAL_TIM_SET_COUNTER(&htim1, 0);
__HAL_TIM_ENABLE_IT(&htim1, TIM_IT_UPDATE);
/* 清零中断标志位 */
__HAL_TIM_CLEAR_IT(&htim1, TIM_IT_UPDATE);
HAL_TIM_Encoder_Start_IT(&htim1, TIM_CHANNEL_ALL);//中断方式
TimerUART = HAL_GetTick();
printf("STM32F030 SysClockFreq:%d \r\n", HAL_RCC_GetSysClockFreq());
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if((HAL_GetTick() - TimerUART) > 1000)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
TimerUART = HAL_GetTick();
}
if(CaptureNum != Temp)
{
Temp = CaptureNum;
HAL_GPIO_TogglePin(LED2_GPIO_Port, LED2_Pin);
__HAL_TIM_IS_TIM_COUNTING_DOWN(&htim1)==0?printf("正转\tCaptureNum:%d\r\n",CaptureNum):printf("反转\tCaptureNum:%d\r\n",CaptureNum);
}
}
/* USER CODE END 3 */
}
📚测试工程
链接:https://pan.baidu.com/s/1idS6b4bA5YZXg54joM1WsA
提取码:a0eg
- 🔖此文章仅作为个人学习探索知识的总结,不作为他人或引用者的理论依据,由于学识所限,难免会出现错误或纰漏,欢迎大家指正。