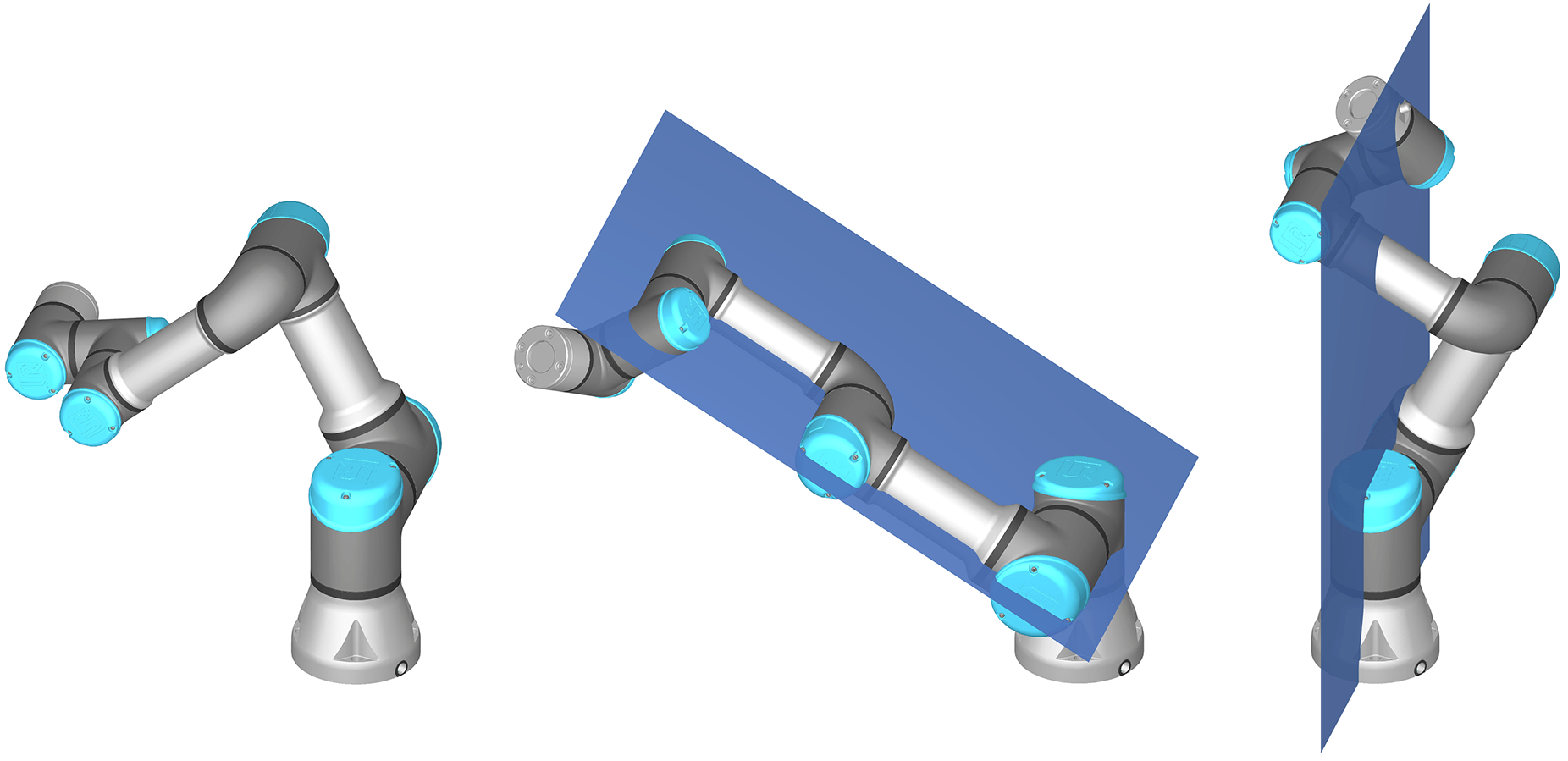
UR构型的奇异点
news2026/4/13 8:35:59
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1103618.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
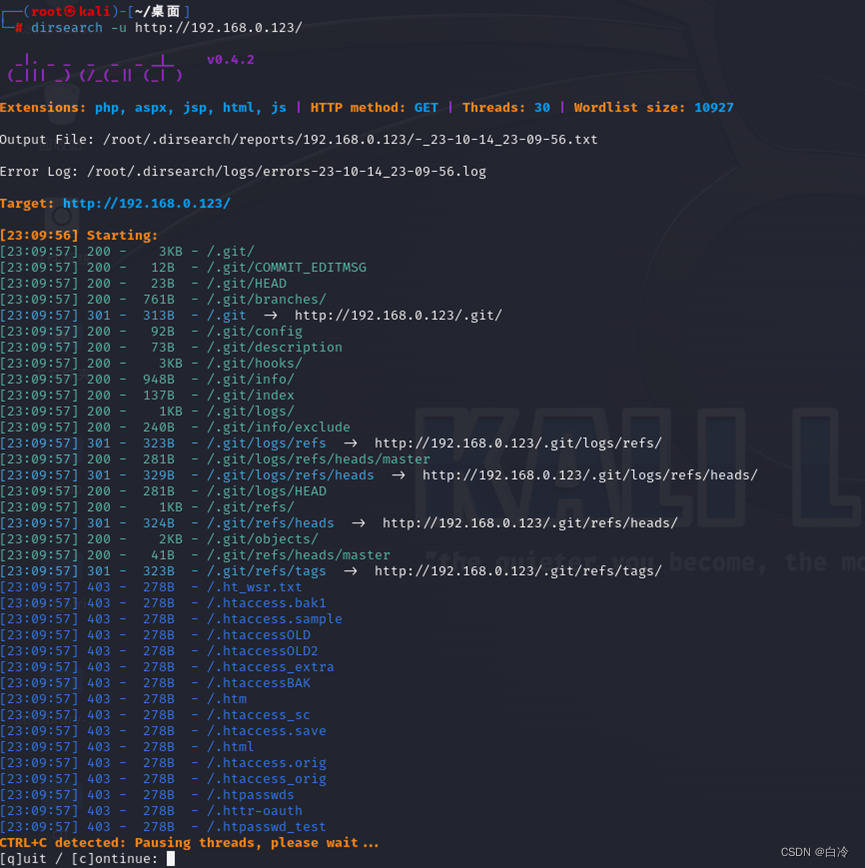
.Git 仓库敏感信息泄露
Git介绍 Git是由林纳斯托瓦兹(Linus Torvalds)命名的,它来自英国俚语,意思是“混账”,Git是一个分布式版本控制软件,最初由林纳斯托瓦兹(Linus Torvalds)创作,于2005年以…
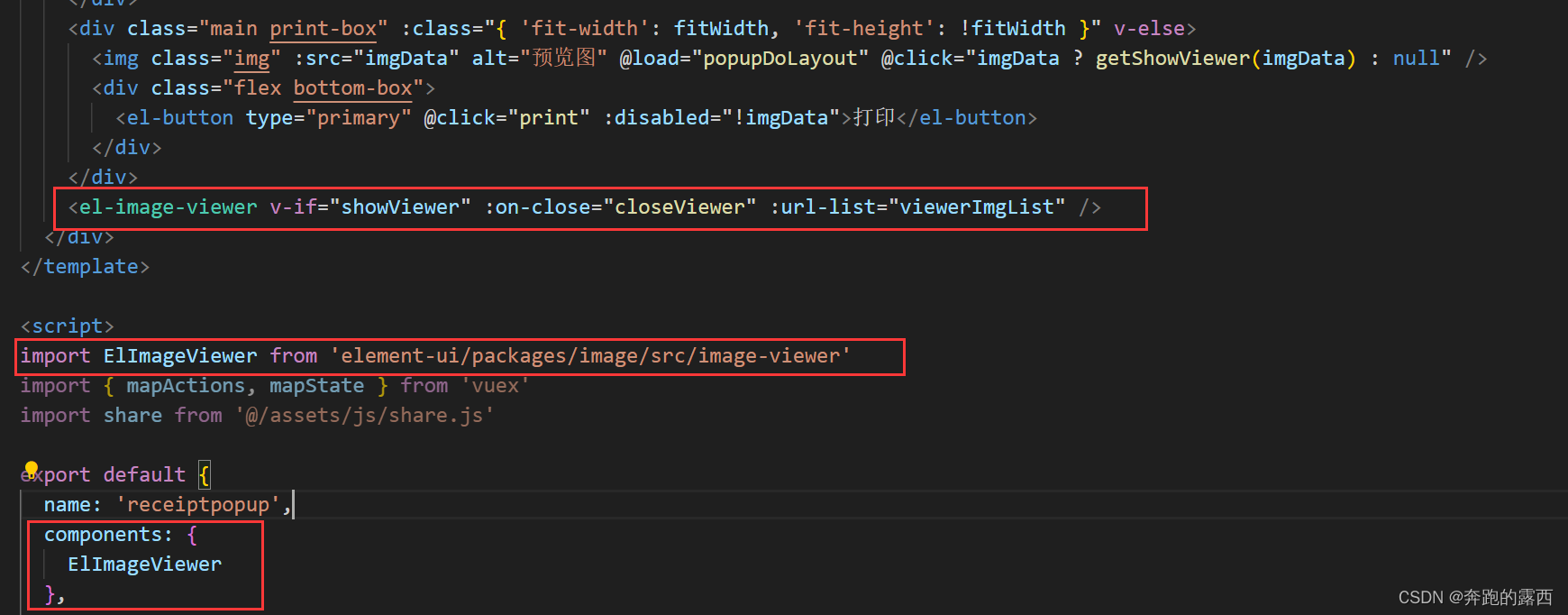
vue2 解密图片地址(url)-使用blob文件-打开png格式图片
一、背景
开发中需要对加密文件进行解码,如图片等静态资源。
根据后端给到的url地址,返回的是图片文件,但是乱码的,需要解码成png图片进行展示
二、请求接口
将后端返回的文件转为文件流,创建Blob对象来存储二进制…
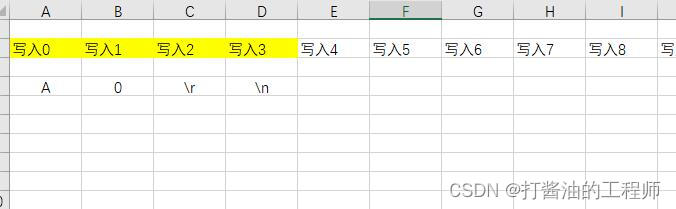
学习笔记|串口通信实战|简易串口控制器|sprintf函数|STC32G单片机视频开发教程(冲哥)|第二十一集(下):串口与PC通信
目录 3.串口通信实战实操简易的工作原理Tips:sprintf函数简介 总结课后练习 3.串口通信实战
做一个简易串口控制器。发送对应指令,让板子做相应的事情,或者传输数据(文本模式下发送,不要选择HEX)。 1.串口发送字符Ax\…
双目视觉实战--相机几何
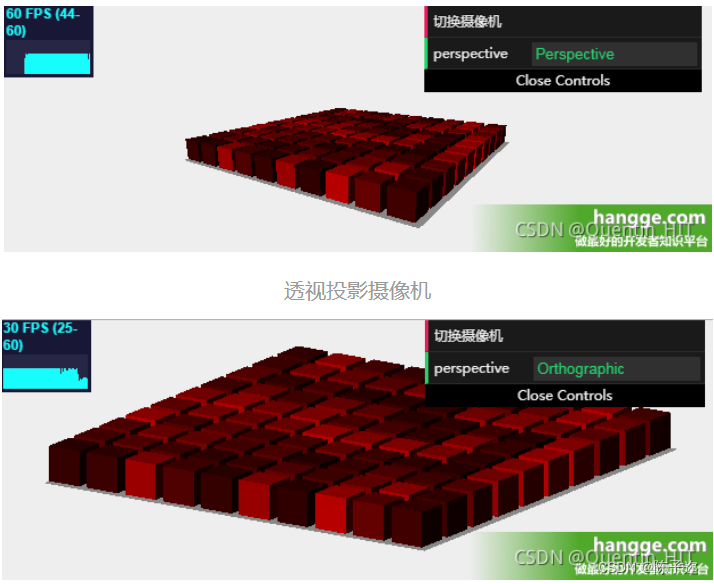
目录 一、针孔摄像机和透镜
1. 针孔摄像机的原理
2. 近轴折射模型
3. 镜头畸变问题
二、摄像机几何
1. 数学基础
2. 相机坐标系(空间点)→像素坐标系的映射关系:
3. 规范化投影变换
4. 投影变换的性质
三、其他摄像机模型
1. 弱透视…

使用vscode + vite + vue3+ element3 搭建vue3脚手架
技术栈
开发工具:VSCode 代码管理:Git 前端框架:Vue3 构建工具:Vite 路由:vue-router 状态管理:vuex AJAX:axios UI库:element-ui 3 数据模拟:mockjs css预处理…
ORACLE 特殊日期时间转换,计算
一:特殊日期处理
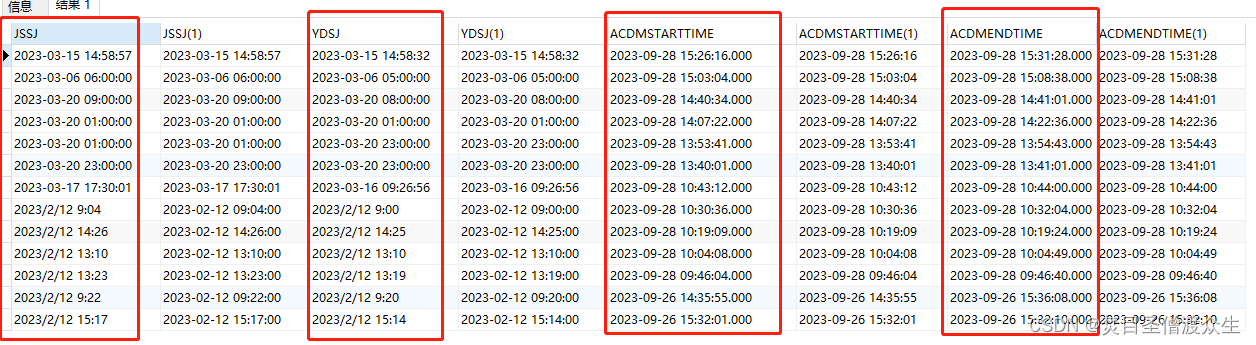
如该字段存储日期形式为:2023/4/23 9:00,2023-3-1 12:23。将这样的数据转换成正确的格式(yyyy-mm-dd HH24:mi:ss),即为:2023-04-23 09:00:00。这里举例的字段为:JS…

PCB电路板废水铜回收工艺有哪些?哪个处理效果好?
印制电路板(PrintedCircuitBoard,简称PCB)作为电子元器件电气相互连接的载体,是电子工业的重要部件之一,半导体、现代高新科技产品都离不开印制电路板。 近年来随着电子行业的快速发展,PCB生产制造量也逐年增加,然而PC…
GPT4 Advanced data analysis Code Interpreter 做行业数据分析、可视化处理图像、视频、音频等
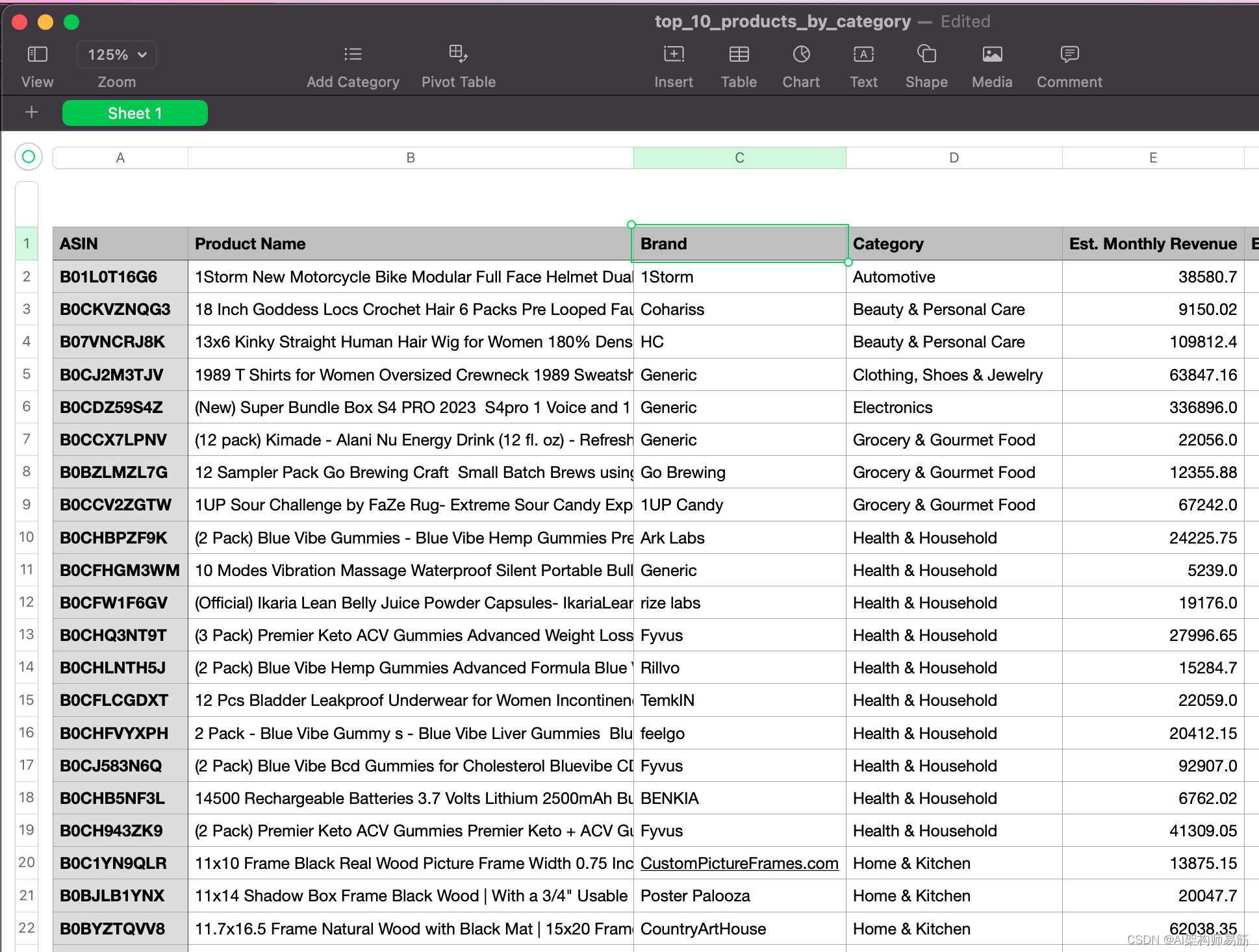
1. 跨境电商如何用ChatGPT选品
ChatGPT Jungle scout
案例:跨境电商如何用ChatGFT选品 ChatGPTJungle scout
素材和资料来自: Jungle ScoutEM, Michael Soltis 和 文韬武韬AIGC
1.1 从Jungle scout上下载数据 Date Range > Last 90 days Downlo…
vscode提示扩展主机在过去5分钟内意外终止了3次,解决方法
参考链接:
https://code.visualstudio.com/blogs/2021/02/16/extension-bisect
https://code.visualstudio.com/docs/setup/uninstall#_clean-uninstall
使用vscode打开jupyter notebook记事本时,窗口右下角提示扩展主机在过去5分钟内意外终止了3次 而…
力扣每日一题46:全排列
题目描述:
给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 示例 1:
输入:nums [1,2,3]
输出:[[1,2,3],[1,3,2],[2,1,3],[2,3,1],[3,1,2],[3,2,1]]示例 2:
…
![类加载的过程总结以及双亲委派模型[JVM]](https://img-blog.csdnimg.cn/4038c3472ac3420faa056a595ebd10a5.png)
类加载的过程总结以及双亲委派模型[JVM]
类加载过程
类一共有七个生命周期:加载->验证->准备->解析->初始化->使用->卸载
加载(加载字节码文件,生成.class对象) 加载是类加载的第一个阶段。 加载阶段的任务是在类文件从磁盘加载到内存中,通常是从cl…

【学习笔记】RabbitMQ04:延迟队列的原理以及实现代码
参考资料 RabbitMQ官方网站RabbitMQ官方文档噼咔噼咔-动力节点教程 文章目录 七、延迟队列7.1 什么是延迟队列7.2 延迟队列的解决方案7.2.1 定时任务7.2.2 **被动取消**7.2.3 JDK的延迟队列7.2.3 采用消息中间件(rabbitMQ7.2.3.1 适用专门优化后的死信队列实现延迟队…

防火墙规则顺序解决方案
防火墙是保护网络免受攻击的第一道防线,防火墙对互联网和公司IT网络之间的流量拥有绝对控制权,防火墙规则的配置处理调节流量的关键任务。
这些规则会仔细检查传入和传出流量,并根据规则中提到的条件允许或阻止它,防火墙规则越严…
leetCode 5. 最长回文子串 动态规划 + 优化空间 / 中心扩展法 + 双指针
5. 最长回文子串 - 力扣(LeetC5. 最长回文子串 - 力扣(LeetCode)5. 最长回文子串 - 力扣(LeetC
给你一个字符串 s,找到 s 中最长的回文子串。如果字符串的反序与原始字符串相同,则该字符串称为回文字符串。…

制造企业如何做好MES管理系统需求分析
随着制造业的不断发展,制造企业对于生产过程的管理需求日益增长。为了提高生产效率和质量,越来越多的制造企业开始关注MES生产管理系统的需求分析。本文将从以下几个方面探讨制造企业如何做好MES管理系统需求分析。 一、明确需求
在进行MES管理系统需求…
利用PHP快速抓取音频数据的方法与技巧
目录
使用cURL库抓取音频数据
优点
潜在问题及解决方案
使用file_get_contents函数抓取音频数据
优点
潜在问题及解决方案
总结 随着互联网的发展,音频内容在网络上的应用越来越广泛,如音乐播放、语音通信等。有时,我们需要从特定的音…
电脑缺失dll文件有什么办法快速解决,dll文件是什么
玩游戏时经常会出现dll文件缺失,那么dll文件是什么?都有哪些办法可以解决dll文件缺失?今天就带大家了解dll文件以及解决dll文件缺失的办法,看完这篇文章相信你会有很大收获,接下来往下看。
一.Dll文件
Dll文件是VC运…

互联网Java工程师面试题·Java 总结篇·第二弹
目录
12、用最有效率的方法计算 2 乘以 8?
13、数组有没有 length()方法?String 有没有 length()方法?
14、在 Java 中,如何跳出当前的多重嵌套循环?
15、构造器(constructor)是否可被重写&…

汽车安全的未来:毫米波雷达在碰撞避免系统中的角色
随着科技的飞速发展,汽车安全系统变得愈加智能化,而毫米波雷达技术正是这一领域的亮点之一。本文将深入探讨毫米波雷达在汽车碰撞避免系统中的关键角色,以及其对未来汽车安全的影响。 随着城市交通的拥堵和驾驶环境的变化,汽车安全…

腾讯云入选挑战者象限,2023 Gartner容器管理魔力象限发布
10月17日,记者获悉,腾讯云入围在Gartner刚刚发布的2023《容器管理魔力象限》报告(Magic Quadrant™ for Container Management)中,并位列挑战者象限,执行力维度排名国内第二。
Gartner的魔力象限报告是业界…