基于正交对立学习的改进麻雀搜索算法
文章目录
- 基于正交对立学习的改进麻雀搜索算法
- 1.麻雀优化算法
- 2. 改进麻雀算法
- 2.1 正态变异扰动
- 2.2 对立学习
- 2.3 正交对立学习
- 3.实验结果
- 4.参考文献
- 5.Matlab代码
- 6.Python代码
摘要:针对麻雀搜索算法种群多样性少,局部搜索能力弱的问题,本文提出了基于正交对立学习的改进型麻雀搜索算法(OOLSSA)。首先,在算法中引入正态变异算子,丰富算法种群多样性;其次,利用对立学习策略,增强算法跳出局部最优的能力;然后,在加入者更新之后引入正交对立学习机制,加快算法的收敛速度;
1.麻雀优化算法
基础麻雀算法的具体原理参考,我的博客:https://blog.csdn.net/u011835903/article/details/108830958
2. 改进麻雀算法
2.1 正态变异扰动
在其原始加人者的位置更新公式中, 直接让非饥饿的 个体一开始从发现者最优位置附近进行更新, 这样会导致 种群的多样性单一, 增加种群陷人局部最优的可能性。因 此, 这里引人正态变异算子对式 (2) 中的最优位置进行扰 动, 让非饥俄的加人者向发现者最优位置的变异解学习, 这 样能够增大种群多样性与跳出局部最优的能力。其中, 正 态变异公式为: X t = X t + α ⋅ X t \boldsymbol{X}^t=\boldsymbol{X}^t+\alpha \cdot \boldsymbol{X}^t Xt=Xt+α⋅Xt 。为了避免仅加值的方法
影响算法性能, 在扰动公式中引入方向因子
F
F
F, 改进公式如 式 (4) (5) 所示。
F
=
{
−
1
,
r
<
0.5
1
,
其他
(
4
)
X
R
b
estj
t
=
X
bestj
t
+
F
⋅
α
⋅
X
bextj
t
(
5
)
\begin{aligned} &F=\left\{\begin{array}{c} -1, \quad r<0.5 \\ 1, \text { 其他 } \end{array}\right. (4)\\ &\boldsymbol{X}_{R b \text { estj }}^t=\boldsymbol{X}_{\text {bestj }}^t+F \cdot \alpha \cdot \boldsymbol{X}_{\text {bextj }}^t (5) \end{aligned}
F={−1,r<0.51, 其他 (4)XRb estj t=Xbestj t+F⋅α⋅Xbextj t(5)
式 (4) (5) 中:
r
r
r 是取值范围在
[
0
,
1
]
[0,1]
[0,1] 的随机数,
α
\alpha
α 是服从
N
(
0
,
1
)
N(0,1)
N(0,1) 的随机数。加人者更新公式改进如式 (6) 所示。
X
i
,
j
t
+
1
=
{
Q
⋅
exp
(
X
uosstj
t
−
X
i
,
j
t
i
2
)
,
i
>
n
2
X
Rbeetj
t
+
1
+
∣
X
i
,
j
t
−
X
R
b
e
e
x
j
t
+
1
∣
⋅
A
+
⋅
L
,
其他
(6)
\boldsymbol{X}_{i, j}^{t+1}= \begin{cases}Q \cdot \exp \left(\frac{\boldsymbol{X}_{\text {uosstj }}^t-\boldsymbol{X}_{i, j}^t}{i^2}\right), & i>\frac{n}{2} \\ \boldsymbol{X}_{\text {Rbeetj }}^{t+1}+\left|\boldsymbol{X}_{i, j}^t-\boldsymbol{X}_{R b e e x j}^{t+1}\right| \cdot \boldsymbol{A}^{+} \cdot \boldsymbol{L}, & \text { 其他 }\end{cases} \tag{6}
Xi,jt+1={Q⋅exp(i2Xuosstj t−Xi,jt),XRbeetj t+1+∣
∣Xi,jt−XRbeexjt+1∣
∣⋅A+⋅L,i>2n 其他 (6)
式 (6)中:
X
R
Recesj
t
\boldsymbol{X}_{R \text { Recesj }}^t
XR Recesj t 是当前最优发现者的正态变异扰动解。
2.2 对立学习
对立学习是一种常用的跳出局部最优解位置的策略。 在原始麻雀搜索算法的侦查时, 最优位置的麻雀往最差解 靠拢,其他位置麻﨎往最优值靠拢。虽然往最差解位置搜 索, 一定程度上能够避免陷人局部最优, 但这样并不利于种 群的收敛。而对立学习不仅能帮助个体快速逃离当前位 置, 而且对立位置相比于当前最差位置, 其适应度值更有可 能比于当前位置更优, 因此,在侦查部分的位置更新公式引 人对立学习策略, 其改进公式如式 (7):
X
i
,
j
t
+
1
=
{
X
b
e
s
t
j
t
+
β
⋅
∣
X
i
,
j
t
−
X
b
e
s
t
j
t
∣
,
f
i
>
f
g
l
b
+
u
b
−
β
⋅
X
i
,
j
t
,
其他
(7)
\boldsymbol{X}_{i, j}^{t+1}=\left\{\begin{array}{l} \boldsymbol{X}_{b e s t j}^t+\beta \cdot\left|\boldsymbol{X}_{i, j}^t-\boldsymbol{X}_{b e s t j}^t\right|, \quad \boldsymbol{f}_i>\boldsymbol{f}_{\mathrm{g}} \\ l b+u b-\beta \cdot \boldsymbol{X}_{i, j}^t, \text { 其他 } \end{array}\right. \tag{7}
Xi,jt+1={Xbestjt+β⋅∣
∣Xi,jt−Xbestjt∣
∣,fi>fglb+ub−β⋅Xi,jt, 其他 (7)
式 (7) 中:
β
\beta
β 是服从
N
(
0
,
1
)
N(0,1)
N(0,1) 的随机数,
l
b
l b
lb 与
u
b
u b
ub 分别为搜索 空间的下界和上界。
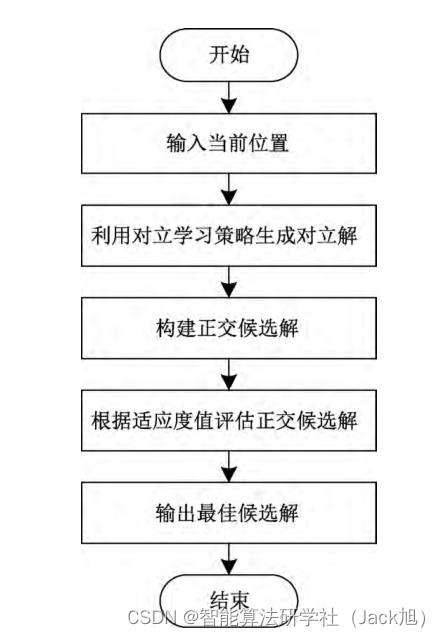
2.3 正交对立学习
正交对立学习策略是利用当前解与对立解, 通过正交 实验设计, 以较少的实验次数找到不同因素的水平最佳组 合的一种方法。目前相关研究方面, 閤大海等
[
14
]
{ }^{[14]}
[14] 提出了基 于正交设计的反向学习策略, 并应用在差分进化算法上, 提 高了算法的鲁棒性; 周凌云等
[
15
]
{ }^{[15]}
[15] 基于萤火虫算法, 引人了 正交重心反向学习策略, 增强了算法求解复杂问题的能力; 基于此, 本文融合对立学习与正交学习, 提出正交对立学习 策略, 对麻雀搜索算法进行改进。该策略的基本思想是: 利 用当前位置与其对立位置, 根据正交表构建正交候选解, 接 着对各候选解进行评估, 最终取出其中最佳的正交组合。 通过这种方式, 充分利用个体和对立个体中各维度的信息 并找到最佳组合, 其流程如图 1
L
4
(
2
3
)
=
[
1
1
1
1
2
2
2
1
2
2
2
1
]
(8)
\boldsymbol{L}_4\left(2^3\right)=\left[\begin{array}{lll} 1 & 1 & 1 \\ 1 & 2 & 2 \\ 2 & 1 & 2 \\ 2 & 2 & 1 \end{array}\right] \tag{8}
L4(23)=⎣
⎡112212121221⎦
⎤(8)
在正交表中,同一列的 1 和 2 分别代表第一个水平和第 二个水平的在该列的维度信息。矩阵中的第一行是当前个体 本身, 其他行是两个水平不同维度之间的正交组合, 式 (8)中只 需要进行 4 次评估, 即可找到当前解与对立解的最佳正交组 合。而针对本文的正交对立学习策略, 则需要构建
D
D
D 因素二 水平的正交表, 其中
D
D
D 为种群维度。随着维数的增多, 试验评 估的次数也会增加,但算法的收敛性能也会更好。
由于正交表包括个体本身位置, 每一个候选解均有相 同的概率成为最佳正交解, 存在经过
M
M
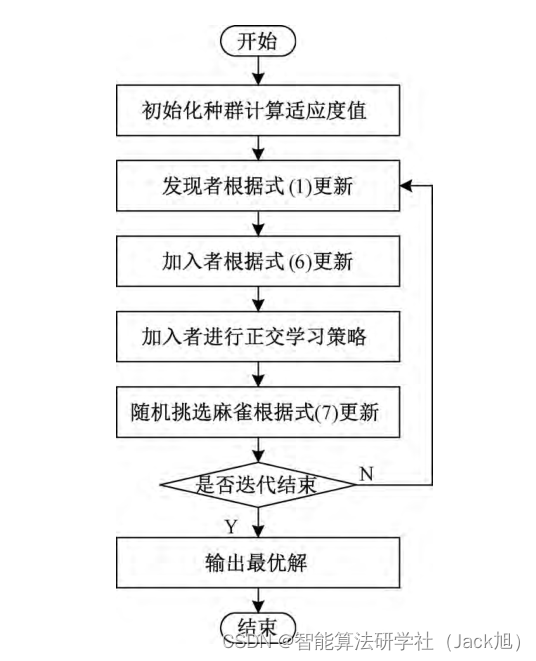
M 次的评估后, 仍然 存在输出最优解为个体本身的可能性。假设种群中每一个 个体都进行正交学习, 这样固然能够更好的加快算法收敛 速度, 但这样同时也会大大增加实验评估的次数, 并不适用 于解决实际问题。因此, 本文正交对立学习策略仅应用在 加人者位置更新部分。在加人者按照式 (6) 更新后, 再利用 式 (7) 中的对立公式得到其对立解, 将以上两个位置按照
D
D
D 因素二水平的正交表构建正交候选解, 经过计算适应度值 评估后, 将最佳正交解候选解作为当前加人者的最终更新 位置。通过这种方法, 能够提高算法收敛速度与精度的同 时避免算法陷人局部最优的问题。
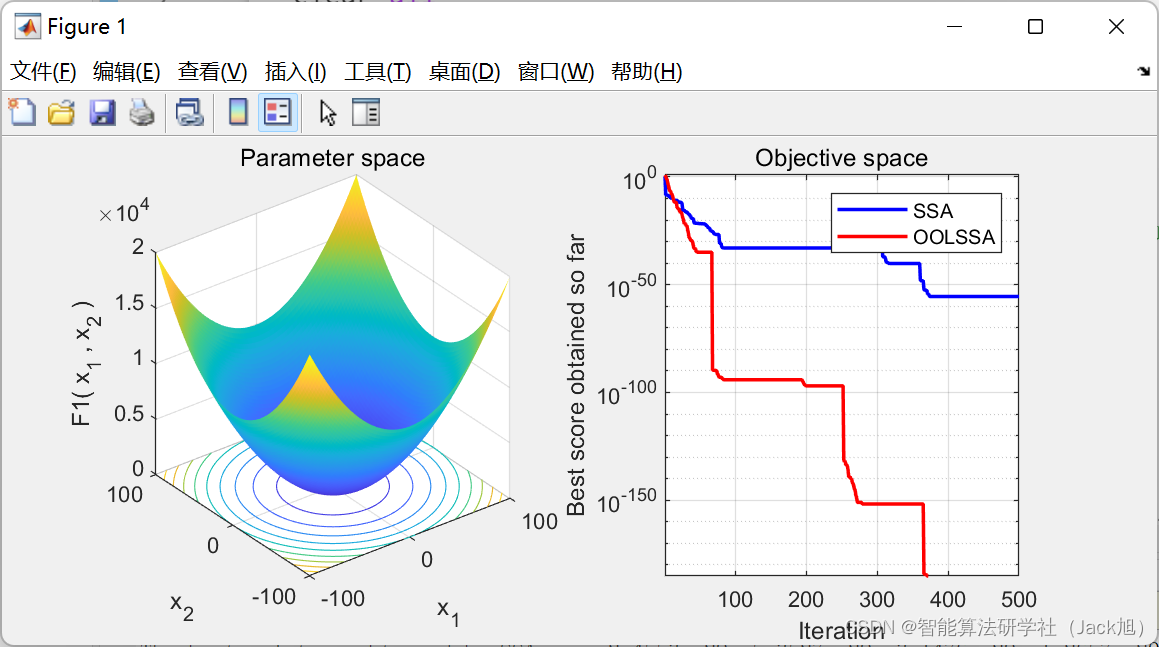
3.实验结果
4.参考文献
[1]王天雷,张绮媚,李俊辉,周京,刘人菊,谭南林.基于正交对立学习的改进麻雀搜索算法[J].电子测量技术,2022,45(10):57-66.DOI:10.19651/j.cnki.emt.2209151.