了解一下ad7606模块,并学习制作一个。
认识AD7606
先了解一下关元AD7606的信息。(芯片手册的内容)
AD7606 采用 5V 单电源供电,不再需要正负 双电源,并支持真正±10V 或±5V 的双极性信号输。所有的通道均能以高达 200 kSPS 的速率进行采样(在数值上采样率与频率应该是相等的,不同的话就是频率Hz可以是小数而采样率S/s一定是整数
), 同时输入端箝位保护电路可以承受最高达±16.5V 的电压。
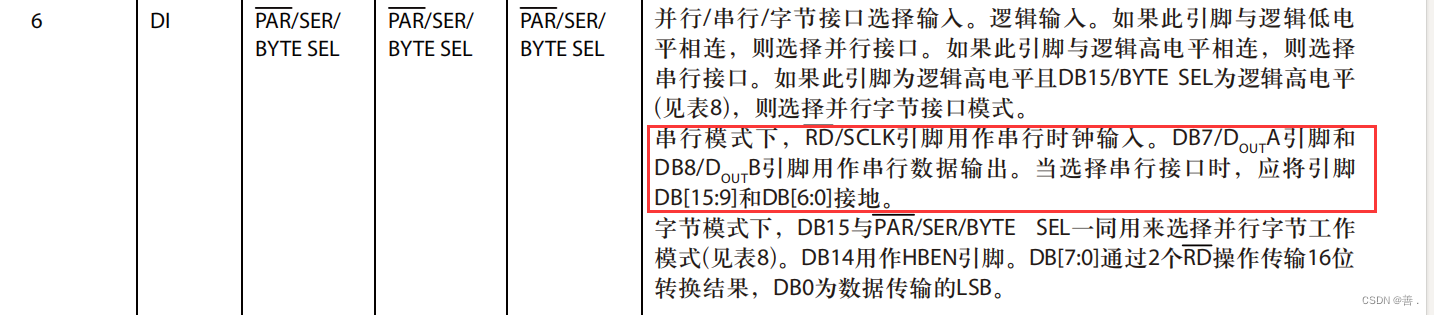
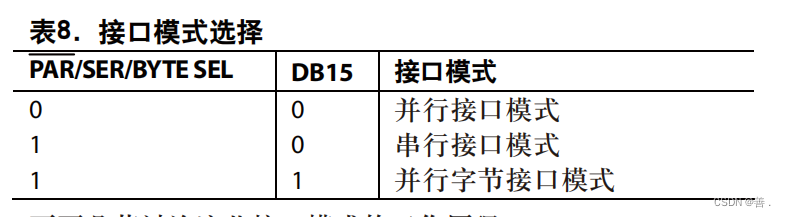
AD7606 的数字接口可以配置在并行或串行模式。数字接口的电平 Vdrive 为 2.3V~5.25V,可以跟当 前任何主流的 CPU/DSP 连接。需要注意的是,当配置 AD7606 工作在串行接口模式时,数据总线的 DB[15:9] 和 DB[6:0]管脚需要做接地处理。
我将采用串行的连接方法。串行可以节约io口。
AD7606 提供了过采样和数字滤波功能。通过管脚 OS[2:0]可以设置过采样倍数(OSR)为 x2, x4, x8, x16, x32, x64。过采样打开后,内部的过采样控制电路和 1 阶 Sinc 数字滤波器会自动被使能,同时-3dB 带宽 也会相应的改变。
ADC 一般需要模拟电源和数字电源。大多数的系统都会有 5V 数字电源,却不一定具有 5V 模拟电源。 此时如果模拟电路和数字电路共用同一个 5V 电源,有害的数字噪声可能会耦合到模拟电路并降低 ADC 的 性能,通常应该避免这样的设计。如果不可避免,需要将 5V 的数字电源进行很好的滤波后再供给模拟电 路用。AD7606 的去耦设计十分简洁,仅需要 9 个电容,其中包括 2 个 10uF,2 个 1uF,5 个 0.1uF。参考 下图 所示。
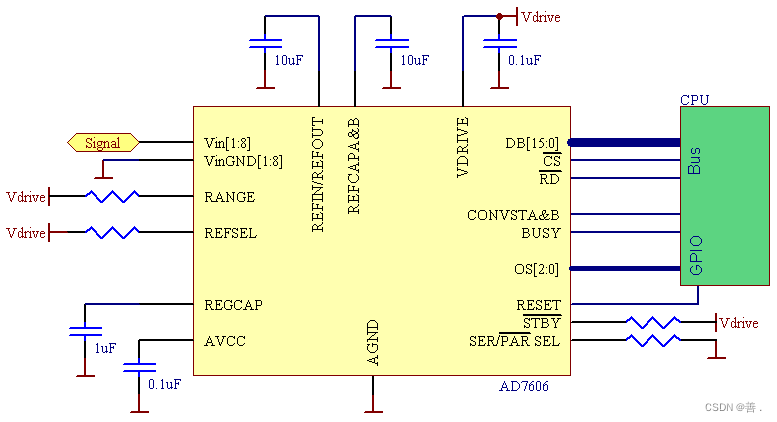
AD7606 的管脚定义已经考虑了 PCB 设计中的布局布线。从管脚定义图中可以看出,LQFP 封装的 4 个 侧边,模拟输入端 Ain 在一侧,数据总线接口在另一侧,其余两侧分别为控制和配置管脚。设计中只需要 4 层 PCB 板,就可以发挥 AD7606 的性能。叠层建议如下图 。表层和底层为走线层,中间两个内层分别为 地平面、电源平面。除了叠层设计,AD7606 的手册中也给出了说明和示例


AD7606需要用到SPI通信协议,之前没有学习过,也需要学习一下。
SPI有四根线:
SPI总线包括4条逻辑线,定义如下:
- MISO:
Master input slave output主机输入,从机输出(数据来自从机); - MOSI:
Master output slave input主机输出,从机输入(数据来自主机); - SCK :
Serial Clock串行时钟信号,由主机产生发送给从机; - NSS:
Slave Select片选信号,由主机发送,以控制与哪个从机通信,通常是低电平有效信号。
其他制造商可能会遵循其他命名规则,但是最终他们指的相同的含义。以下是一些常用术语;
- MISO也可以是
SIMO,DOUT,DO,SDO或SO(在主机端); - MOSI也可以是
SOMI,DIN,DI,SDI或SI(在主机端); - NSS也可以是
CE,CS或SSEL; - SCK也可以是SCLK;
本文将按照以下命名进行讲解[MISO, MOSI, SCK,NSS]
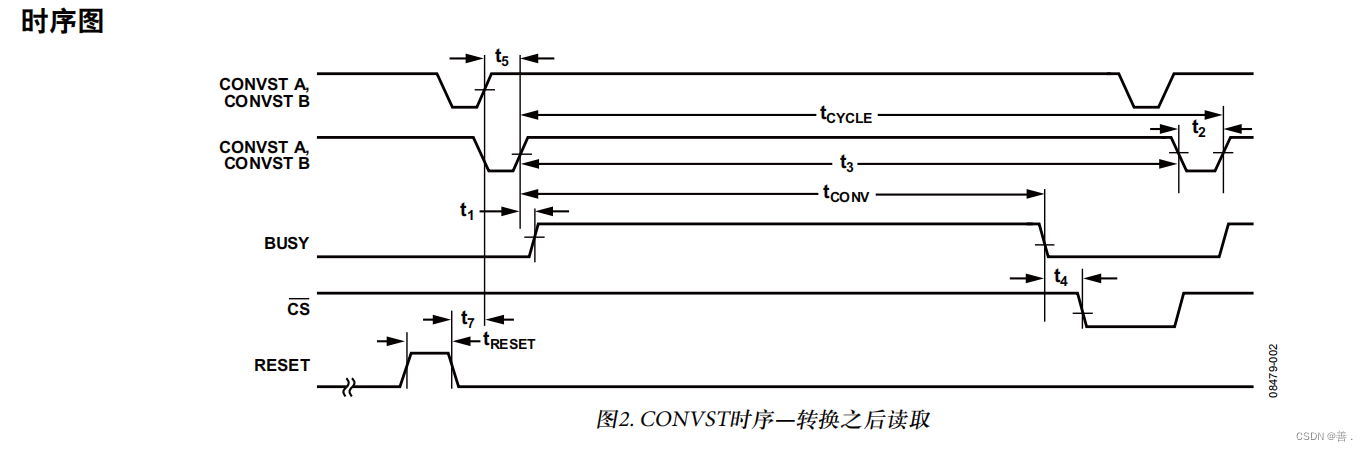
在软件配置上将根据时序图进行配置。
软件配置
我是在网上找了相关的例程,后进行一点修改。
我采用的是STM32F103VCT6,全部引脚引出,用ZET6也可以。AD7606是用的;凌智电子的模块。
AD7606模块采用5v供电,J11跳线帽接3.3v,J2跳线帽接±5v。
采用串行连接。AD7606与单片机连接示意图:
| AD7606 | 全称 | 单片机 | 功能介绍 |
| +5 | +5 | ||
| GND | GND | ||
| REST | RESET | C8 | GPIO复位AD7606 |
| SER | PAR/SER/ BYTE SEL | +3.3V | 并行/串行/字节接口选择输入,接3.3V |
| STBY | STBY | B11 | 待机模式输入 |
| OS2 | OS2 | B13 | 过采样模式引脚。 |
| OS1 | OS1 | B14 | |
| OS0 | OS0 | B15 | |
| CO_A | CONVST A | B10 | 启动模拟输入通道转换信号 |
| CO_B | CONVST B | C9 | |
| CS_N | CS | A6 | 片选,置低后标志可以开始输出模拟量 |
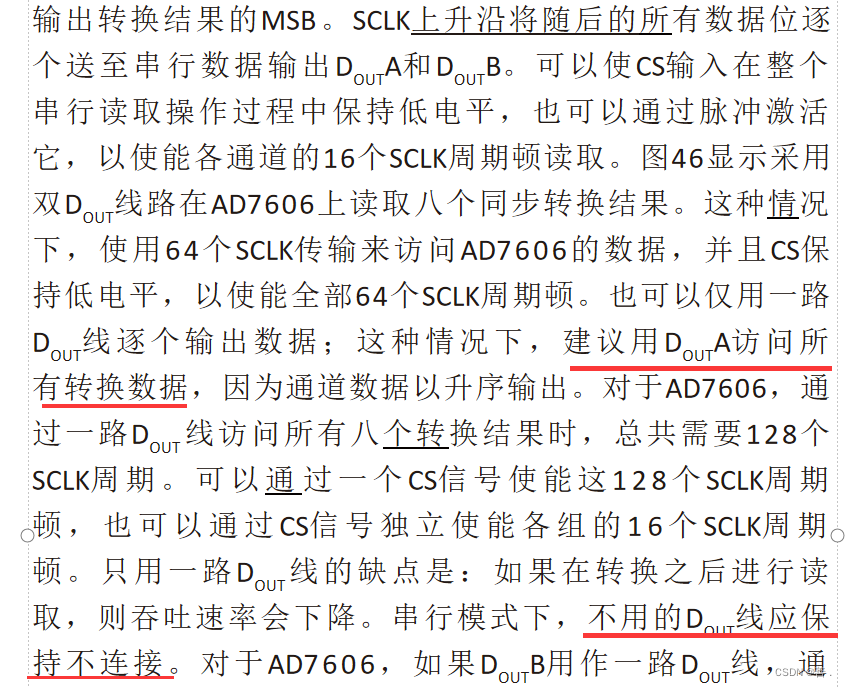
| RD/SC | RD/SCLK | A7 | 串行时钟输入(SCLK)。SCLK上升沿将随后的所有数据位逐个送至串行数据输出DOUTA和DOUTB |
| DB7 | DB7/DOUTA | C6 | 串行接口数据输出引脚(DOUTA)。 |
| BUSY | BUSY | A5 | 输出繁忙 |
| DB15 | DB15/BYTE SEL | GND | 并行/串行/字节接口选择输入,接地 |
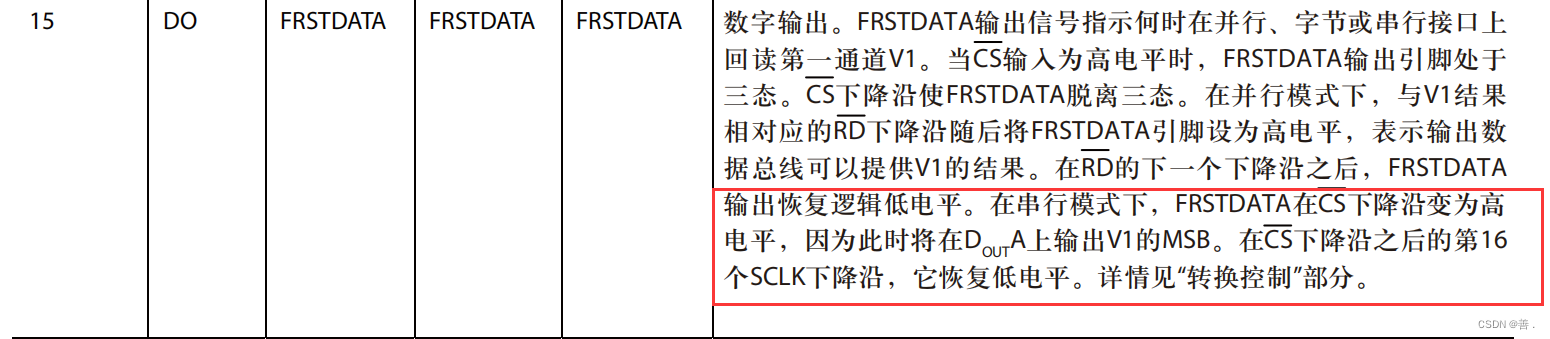
| FR_D | FRSTDATA | A4 | 数字输出(可不接) |

当选择串行接口时,应将引脚 DB[15:9]和DB[6:0]接地。
在实际使用时空接也是可以的。但画电路的时候建议接地。
只用一路DOUT 线的缺点是:如果在转换之后进行读 取,则吞吐速率会下降。串行模式下,不用的DOUT线应保 持不连接。
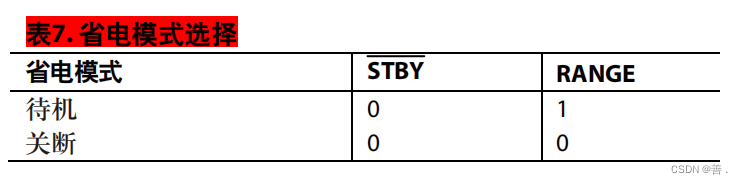
省电模式
过采样位解码

该引脚可以不接
源码分享
AD7606.C
#include <stm32f10x.h>
#include "Delay.h"
#include "AD7606.h"
//#include "lze_lcd.h"
extern u8 IO_TAG;
//-----------------------------------------------------------------
// 初始化程序区
//-----------------------------------------------------------------
//-----------------------------------------------------------------
// void GPIO_AD7606_Configuration(void)
//-----------------------------------------------------------------
//
// 函数功能: AD7606引脚配置函数
// 入口参数: 无
// 返回参数: 无
// 全局变量: 无
// 调用模块: RCC_APB2PeriphClockCmd(); GPIO_Init();
// 注意事项: 用GPIO驱动方式和FSMC驱动方式下的引脚配置不一样
//
//-----------------------------------------------------------------
void GPIO_AD7606_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能IO口时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |
RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD |
RCC_APB2Periph_GPIOE,
ENABLE);
GPIO_DeInit(GPIOA);//将GPIOx外设寄存器初始化为默认复位值
GPIO_DeInit(GPIOB);//除了B4和A15是高电平。B3没信号外,其他io口被拉低。(默认值)
GPIO_DeInit(GPIOC);
GPIO_DeInit(GPIOD);
GPIO_DeInit(GPIOE);
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// AD7606
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// 控制线配置
// CS_N RD/SCLK
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// FRSTDATA BUSY
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IN_FLOATING ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// rst convstB convstA STby OS12 OS11 OS10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11 |
GPIO_Pin_13 | GPIO_Pin_14 |
GPIO_Pin_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//数据线配置(1)
// DoutA
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
//-----------------------------------------------------------------
// void AD7606_Init(void)
//-----------------------------------------------------------------
//
// 函数功能: AD7606初始化函数
// 入口参数: 无
// 返回参数: 无
// 全局变量: 无
// 调用模块:
// 注意事项: 无
//-----------------------------------------------------------------
void AD7606_Init(void)
{
convstA_Set; //B10
convstB_Set; //C9
delay_ms(1);
STby_Set; //B11
clk_Set; //A7
cs_Set; //A6
OS10_Reset; //B15
OS11_Reset; //B14
OS12_Reset; //B13
AD7606_reset(); //复位
delay_ms(1); //
AD7606_startconvst(); // 启动转换
}
/* * 名称:AD7606_startconvst() * 功能:启动转换 */
void AD7606_startconvst(void)
{
convstA_Reset; //B10
convstB_Reset; //C9
delay_us (1);
convstA_Set; //B10
convstB_Set; //C9
}
/* * 名称:AD7606_reset() * 功能:复位模块 */
void AD7606_reset(void)
{
rst_Reset; //C8
delay_us (1);
rst_Set; //C8
delay_us(1);
rst_Reset; //C8
}
/*
* 名称:AD7606_read_data()
* 功能:读取数据
* 返回值:返回一个结构体指针,该指针为指向结构体数组的首地址
*/
void AD7606_read_data(s16 * DB_data)
{
u8 i,j;
for(i=0;i<8;i++)
{
u16 DB_data1 = 0;
cs_Reset; //A6
delay_us(1);
for(j=0;j<16;j++)
{
clk_Reset; //A7
delay_us(1);
// DB_data1 = ((u16)(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_0))<< (15-j)) + DB_data1 ;
DB_data1 = ((u16)(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_6))<< (15-j)) + DB_data1 ;
clk_Set; //A7
delay_us(1);
}
cs_Set; //A6
DB_data[i] = (u16)DB_data1;
}
}
AD7606.H
#ifndef _AD7606_H
#define _AD7606_H
#define sampling_0times 0
#define sampling_2times 1
#define sampling_4times 2
#define sampling_8times 3
#define sampling_16times 4
#define sampling_32times 5
#define sampling_64times 6
#define STby_Set GPIO_SetBits(GPIOB,GPIO_Pin_11)
#define OS10_Set GPIO_SetBits(GPIOB,GPIO_Pin_15)
#define OS10_Reset GPIO_ResetBits(GPIOB,GPIO_Pin_15)
#define OS11_Set GPIO_SetBits(GPIOB,GPIO_Pin_14)
#define OS11_Reset GPIO_ResetBits(GPIOB,GPIO_Pin_14)
#define OS12_Set GPIO_SetBits(GPIOB,GPIO_Pin_13)
#define OS12_Reset GPIO_ResetBits(GPIOB,GPIO_Pin_13)
#define convstA_Set GPIO_SetBits(GPIOB,GPIO_Pin_10)
#define convstA_Reset GPIO_ResetBits(GPIOB,GPIO_Pin_10)
#define convstB_Set GPIO_SetBits(GPIOC,GPIO_Pin_9)
#define convstB_Reset GPIO_ResetBits(GPIOC,GPIO_Pin_9)
#define rst_Set GPIO_SetBits(GPIOC,GPIO_Pin_8)
#define rst_Reset GPIO_ResetBits(GPIOC,GPIO_Pin_8)
#define clk_Set GPIO_SetBits(GPIOA,GPIO_Pin_7)
#define clk_Reset GPIO_ResetBits(GPIOA,GPIO_Pin_7)
#define cs_Set GPIO_SetBits(GPIOA,GPIO_Pin_6)
#define cs_Reset GPIO_ResetBits(GPIOA,GPIO_Pin_6)
#define frstdata_Set GPIO_SetBits(GPIOA,GPIO_Pin_4)
#define frstdata_Reset GPIO_ResetBits(GPIOA,GPIO_Pin_4)
#define busy_Set GPIO_SetBits(GPIOA,GPIO_Pin_5)
#define busy_Reset GPIO_ResetBits(GPIOA,GPIO_Pin_5)
#include "stm32f10x.h" // Device header
extern void GPIO_AD7606_Configuration(void);
extern void AD7606_Init(void);
extern void AD7606_startconvst(void);
extern void AD7606_reset(void);
extern void AD7606_read_data(s16 * DB_data) ;
#endif
//-----------------------------------------------------------------
// End Of File
//-----------------------------------------------------------------
//数字:0
//CH1: 1789.4 mv 0xadcf 44495
//CH2: 4547.4 mv 0xf46a 62570
//CH3: 1540.5 mv 0xa770 42864
//CH4: 4823.5 mv 0xfb7b 64379
//CH5: 1000.4 mv 0x999c 39324
//CH6: 2565.0 mv 0xc1aa 49578
//CH7: 1362.2 mv 0xa2df 41695
//CH8: 2978.1 mv 0xcc3d 52285
main.c
#include "stm32f10x.h" // Device header
#include "AD7606.h"
#include "PeripheralInit.h"
//注意:
// (1) 串行:SER = 1;D15 = 0;
// (2) 通过J3跳帽选择输入电压的范围,修改程序第92行中sprintf里面的(float)(DB_data[i]*5000.0/32768)的5000.0,在5000.0和10000.0根据跳帽改变。
// (3) J2跳帽这里连接3.3V,具体选择看引脚功能。
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
u8 dis_buf[40];
u8 i;
uint8_t temp;
s16 DB_data[8] = {0};
delay_init(); //延时初始化
PeripheralInit(); // 外设初始化
while(1)
{
printf("数字:%d\r\n",Num++);
delay_ms (1000);
AD7606_startconvst(); //AD7606开始转换
temp = GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5); // 读取 BUSY的状态
while(temp == 0) //当busy为低电平时,数据转换完毕,此时可以读取数据
{
delay_us(1);
temp = GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5); // 读取 BUSY的状态
}
AD7606_read_data(DB_data); //读取数据放至数组DB_data[]
for(i=0;i<8;i++)
{
sprintf((char*)dis_buf,"CH%1d:%8.1f mv 0x%04x %6d\r\n", i+1, (float)(DB_data[i]*5000.0/32768), (u16)(DB_data[i]^0x8000), (u16)(DB_data[i]^0x8000));
printf("CH%1d:%8.1f mv 0x%04x %6d\r\n", i+1, (float)(DB_data[i]*5000.0/32768), (u16)(DB_data[i]^0x8000), (u16)(DB_data[i]^0x8000)); //在串口显示结果
delay_ms(20);
}
delay_ms(100);
}
}
之前有一个疑问,为什么不用单片机自带的ad而用模块?
整理一下网上的答案
| 1、AD7606是8路同步采样,内部ADC不是,最高只能三路同步。 2、内置的精度有效位没有7606高 3、7606是真双极性,支持正负10V,而内置的只能0-3.3V,不支持负压采集。 4、7606最高是200Ksps。内置是3.6Msps |
AD7606优势在于高精度,支持宽电压,可达±10V。抗干扰能力强。
单片机的优势在于价格便宜。










![[ValueError: not enough values to unpack (expected 3, got 2)]](https://img-blog.csdnimg.cn/edd0002b40e2424b920816c0fbce5dd0.png)