S型速度曲线规划的基础知识可以查看下面这篇博客:
带平滑功能的斜坡函数(多段曲线控温纯S型曲线SCL源代码+完整算法分析)_RXXW_Dor的博客-CSDN博客PLC运动控制基础系列之梯形速度曲线,可以参看下面这篇博客:PLC运动控制基础系列之梯形速度曲线_RXXW_Dor的博客-CSDN博客运动控制的梯形加减速大家应该很熟悉了,这篇博文属于基础概念性文章,陆续会更新和运动控制相关的内容,PLC运动控制算法讲解,分析。博途PLC1200/1500PLC S型速度曲线变频器控制应用(SCL完整源代码)_RXXW_Dor的博客-CSDN博客。_斜坡函数https://rxxw-control.blog.csdn.net/article/details/128893104通常的S型速度曲线轨迹规划都是给出目标速度和加减速时间,但是这里我们讨论的是给出物体运动速度rVx(mm/s)和减速距离S3,规划生成连续的S型减速曲线,具体算法描述如下:
1、已知当前速度和减速距离
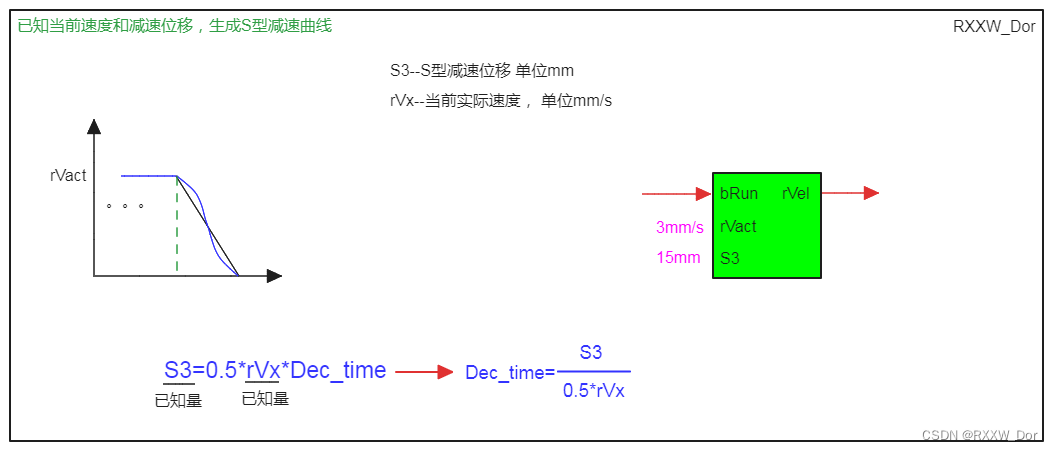
通过移动距离S3 和当前最高速度rVx可以计算出纯S型速度曲线减速时间Dec_time(s),这样就可以利用S型速度公式完成速度曲线的轨迹规划了。下面我们看下博途PLC的SCL代码部分。
待续....