机器人中的数值优化|【七】线性搜索牛顿共轭梯度法、可信域牛顿共轭梯度法 Line Search Newton-CG, Trust Region Newton-CG
往期回顾
机器人中的数值优化|【一】数值优化基础
机器人中的数值优化|【二】最速下降法,可行牛顿法的python实现,以Rosenbrock function为例
机器人中的数值优化|【三】无约束优化,拟牛顿法理论与推导
机器人中的数值优化|【四】L-BFGS理论推导与延伸
机器人中的数值优化|【五】BFGS算法非凸/非光滑处理
机器人中的数值优化|【六】线性共轭梯度法,牛顿共轭梯度法
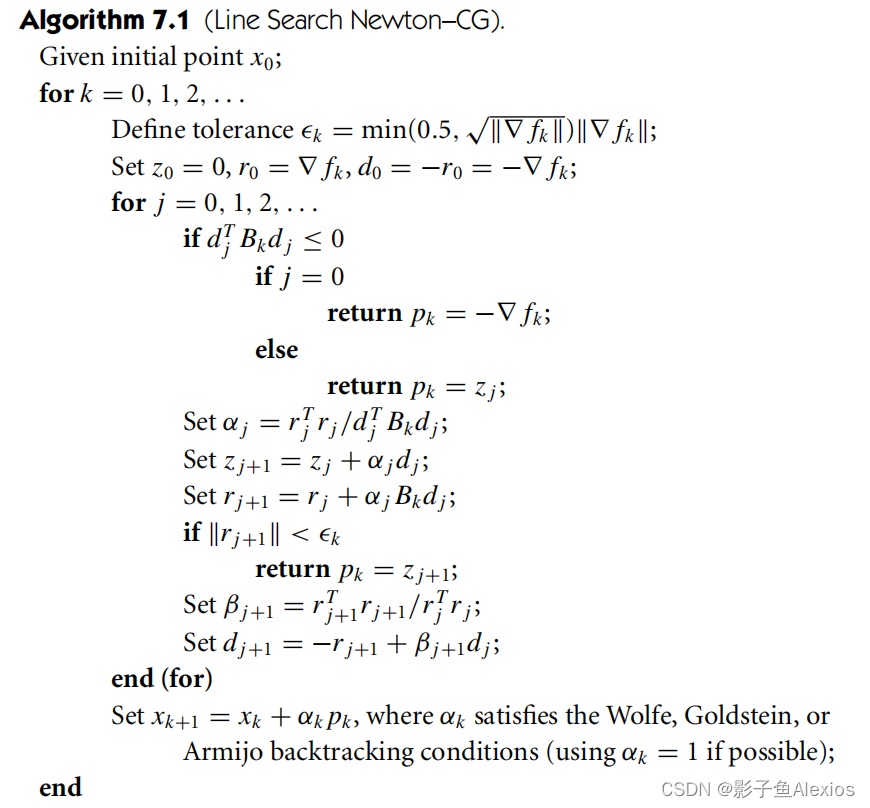
线性搜索牛顿共轭梯度法 Line Search Newton-CG
线性搜索牛顿-CG方法,也称为截断牛顿方法。最基础的Newton step是通过求解线性系统的方程
∇
2
f
k
d
k
N
=
−
∇
f
k
\nabla^2 f_k d_k^N = -\nabla f_k
∇2fkdkN=−∇fk来实现的。然而,CG方法是用来求解正定系统的,当
x
k
x_k
xk不接近解时,hessian阵
∇
2
f
k
\nabla^2 f_k
∇2fk可能具有负特征值。因此,一旦产生了一个负曲率的方向,我们就终止了CG迭代。
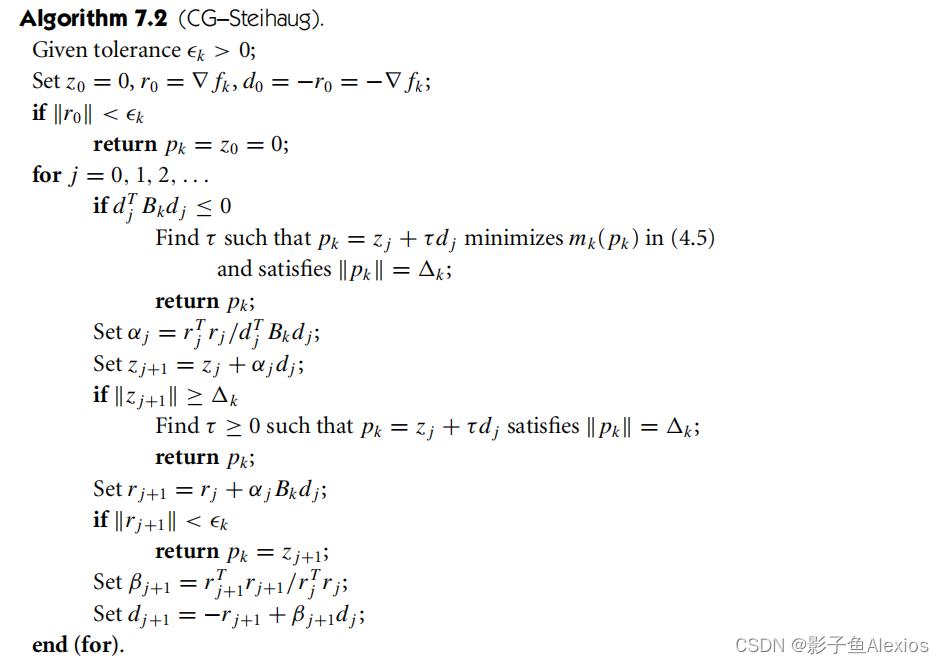
可信域牛顿共轭梯度法 Trust Region Newton Conjugate Gradient Method