文章目录
- 1. Pix4Dmapper
- 2. PhotoScan
- 3. ContextCapture
- 4. 天工GodWork
- 5. Trimble Inpho
- 6. IMAGINE Photogrammetry
- 7. 大疆智图
推荐阅读:《无人机航空摄影测量精品教程》
包括:无人机航测外业作业流程(像控点布设、航线规划、仿地飞行、航拍)和内业数据处理软件(Pix4d、CC、EPS、PhotoScan、Globalmapper)像控点权重调配、空三加密、DOM、DSM、DEM,DLG生成、等高线生成、高程点提取,点云分类过滤分割、点云生成DEM、三维模型生成等。
1. Pix4Dmapper
Pix4Dmapper是一款目前比较流行的无人机摄影测量后处理软件,是实现无人机自动航测功能的三维建模软件,软件集全自动、快速、专业精度为一体的无人机数据和航空影像处理于一体,帮助用户实现云计算功能,快速的生成最精准的报告等。主要的功能包括自动快速匹配、DSM生成、DOM生成、点云(分类着色)生成等等。
主要特点:
- 自动化处理:Pix4Dmapper的整个过程完全自动化,不需要专业知识,它可以从数千张影像快速制作成专业的的二维地图和三维建模,大大提高了处理效率。
- 完善的工作流:Pix4Dmapper可以把原始航空影像变为用户所需的DOM、DSM和三维模型数据,而且成果输出多种格式,适用于各种应用行业的软件。
- 自动获取相机参数:Pix4Dmapper可以自动从影像EXIF中读取相机的基本参数,例如:相机型号、焦距、像主点等,智能识别自定义参数,使得数据处理更为便捷。
总的来说,Pix4Dmapper是一款功能强大的无人机数据和航空影像数据处理软件,其特点主要体现在它的自动化处理、完善的工作流以及自动获取相机参数等方面。

2. PhotoScan
PhotoScan在无人机航空摄影测量空三运算中,具有运行速度快、精度高等特点。PhotoScan空三运算的结果可以导入CC等进行模型构建。【PhotoScan精品教程】讲解利用PhotoScan软件进行航测内业空三运算、4D产品生成等项目化作业流程及注意事项。

3. ContextCapture
ContextCapture是一款功能强大的三维建模软件,用户只需使用自己拍摄的普通照片,就能快速创建细节丰富的三维实景模型,并在项目的整个生命周期内为设计、施工和运营决策提供精确的现实环境背景。
特点:
- 高兼容性:ContextCapture可以处理各种对象和数据源,进行精确无缝重建。
- 数据处理能力:除了基本的建模功能,ContextCapture还可以加入其它可选的辅助数据,如传感器属性(焦距、传感器尺寸、主点、镜头失真)、照片的位置参数(如 GPS)、照片姿态参数(如 INS)以及控制点等,以提供更高精度的建模。
- 自动化处理:ContextCapture的建模过程无需人工干预,可以在一定的计算时间内,输出带有真实纹理的高分辨率三角网格模型,准确重建建模对象几何外观及纹理特征。建模时间根据输入数据量的大小而定,输出模型的精度与输入照片的分辨率和精度高度相关,输入照片的分辨率和精度越高,生成的三维模型的细节越精细。
- 强大的系统架构:ContextCapture系统架构包含两大模块,主控台(Master)和引擎端(Engine),遵循主从模式(Master-Worker)。主控台是ContextCapture的主要模块,用户通过图形用户接口向软件定义输入数据,设置处理过程、提交过程任务、监控任务的处理过程与处理结果可视化等。引擎端是ContextCapture的工作模块,它在计算机后台运行,无需与用户交互。当引擎端空闲时,一个等待队列中的作业的执行,主要取决于它的优先级与提交的数据。由于采用了这种主从模式,ContextCapture支持网格并行计算。只需在多台计算机上运行多个ContextCapture引擎端 ,并将它们关联到同一个作业队列上,就会大幅降低处理时间。

4. 天工GodWork
天工GodWork是一款针对航空遥感影像数据研发的高自动化数据处理软件,它以当前国内外主流摄影测量流程为依据,结合计算机视觉的最新理论,提出了一套完整的摄影测量数据处理解决方案。
天工GodWork具有以下特点:
- 多种航空数据支持:支持通用航空平台航空遥感数据以及多种低空高分航空遥感数据输入。
- 智能化可视化界面:人机交互中内置智能预测,使得作业人员在快速交互的同时更直观清晰地理解产品生成流程,减轻产品学习和理解负担。

5. Trimble Inpho
Trimble Inpho摄影测量软件是欧洲最著名的航空摄影测量与遥感处理软件之一,可以全面系统地处理航测遥感、激光、雷达等数据。
Trimble Geospatial 设计的 Trimble Inpho 可将航拍图像精确地转换为准确的点云、表面模型或正射影像马赛克。 该软件旨在用于广泛的用途,包括国家制图、林业、农业、采矿、公用事业和能源、城市发展、国防和灾难响应。 使用 Inpho,您还可以为第 3 方软件(例如自动化城市建模软件)处理机载 LiDAR 扫描。
Trimble Geospatial 拥有超过 30 年的经验,拥有尖端技术和强大的技术支持。
以下是Trimble Inpho的一些特点:
- 高效的空三匹配策略:Inpho v1的空三处理模块MATCH-AT中除了先前版本中已有的可靠而强大的空三匹配算法外,又新增高效匹配策略,可显著提高三角测量的性能,并提高大型摄影测量项目的生产效率。
- 模块化结构:Trimble Inpho软件采用模块化结构,可以整合成完整完美的工作流程,也可以将其中一些独立的组件整合到空间地理信息的生产工作流中,从而为国家测绘、林业、农业、采矿业、公用事业和能源、城市开发、国防和灾害应急的地理信息处理工作提供有效的帮助。
- 全球化的实施案例:Trimble Inpho经过三十多年的研发,已经具有遍布全球的数千个实施案例,被视为行业标准。
- 高精度的数据处理:Trimble Inpho的工程设计符合数字摄影测量和激光扫描数据生产的严格标准,它提升了地理信息处理的科学和技艺,使地理信息处理在最新一代Inpho软件中焕发了生机。

6. IMAGINE Photogrammetry
IMAGINE Photogrammetry 是摄影测量软件解决方案的主要参与者,被国家测绘机构、地区测绘机构、交通部和商业测绘公司使用。
该软件的算法可以自动生成高质量的点云。 在该程序中,您可以将点云视为 3D 图像、透视图或倾斜视图。
Hexagon 是 IMAGINE Photogrammetry 的开发商,提供该软件作为 Producer Suite 的一部分,Producer Suite 是一组旨在进行实时地理空间数据分析的工具。 因此,它可以很好地集成到 Stereo Analyst 或 Erdas Engine 等程序的 Hexagon 管道中。 使用特征提取和基于对象的分类等工具有助于以有意义的方式解释摄影测量镜头。 结合这些程序是一个强大的工具,可用于收集有关自然资源、基础设施、自然灾害等的重要信息。

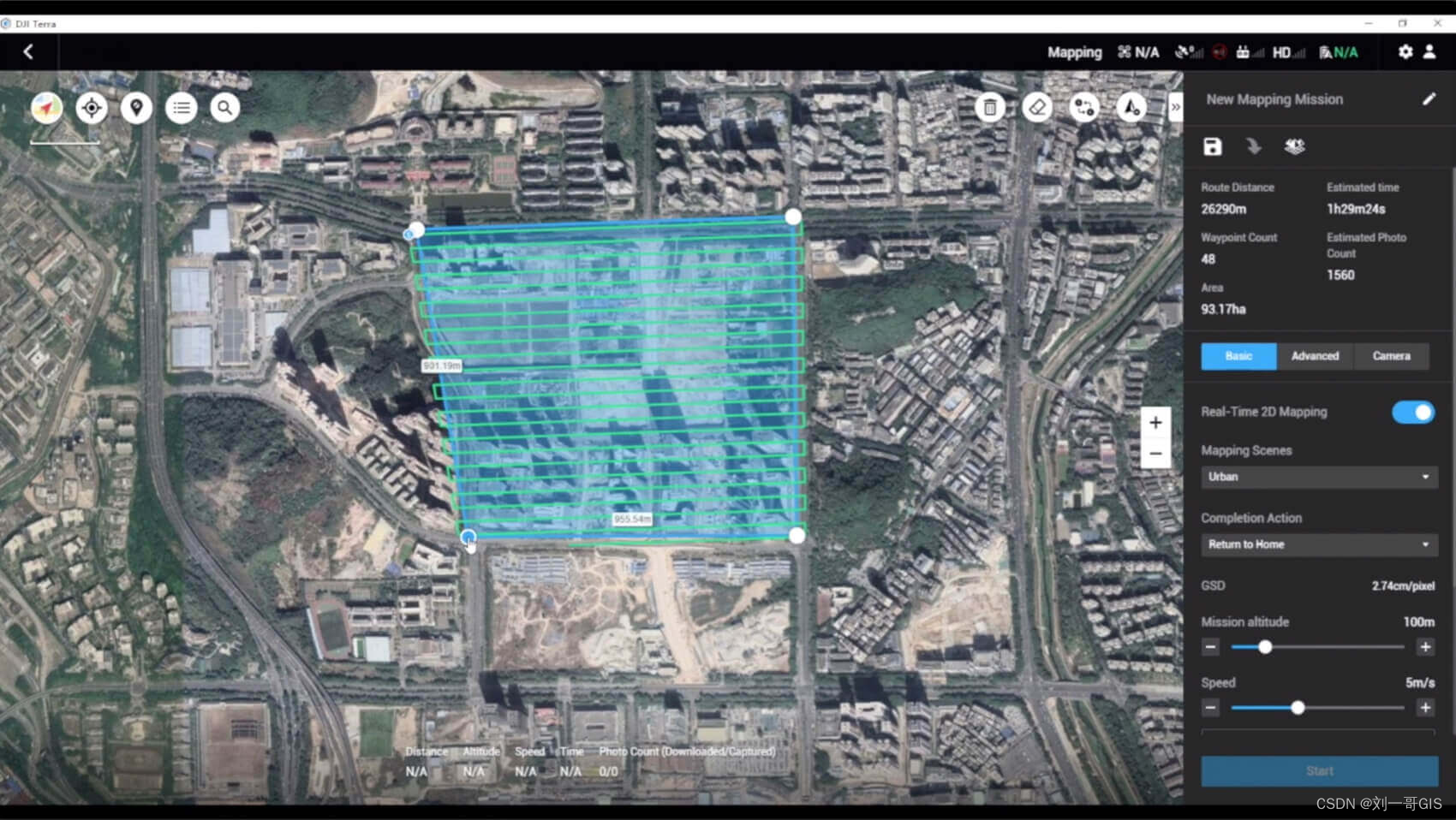
7. 大疆智图
大疆智图是一款以二维正射影像与三维模型重建为主,同时提供二维多光谱重建、激光雷达点云处理、精细化巡检等功能的PC应用软件。它针对测绘、电力、应急、建筑、交通、农业等垂直领域提供完整的模型重建解决方案,帮助行业用户全面提升内外业效率。此外,它还支持自主航线规划、飞行航拍等功能。
以下是这款软件的一些主要特点:
- 三维重建:大疆智图可以生成高、中、低三种分辨率的实景三维模型,并使用AI技术自动对模型水面进行优化,满足测绘建模、事故现场建模、电网设备重建、建筑项目进度跟踪等多种场景的需求。
- 二维重建:大疆智图根据不同场景分别优化算法,大幅提升处理效率,有效避免图像扭曲变形,准确细致地呈现目标对象和测区。
- 激光雷达处理:大疆智图支持禅思激光雷达点云一键式数据处理,包含轨迹解算、点云与可见光数据精准融合、点云精度优化、地面点提取、作业报告输出等,满足高精度点云数据处理需求。
- 多光谱支持:对于Mavic 3多光谱版和精灵4多光谱版,大疆智图还支持辐射校正,并可输出反射率地图用于遥感科学研究,或直接生成NDVI、NDRE等植被指数图。
- 实时三维重建:大疆智图还基于DJI先进的实时重建算法,能将无人机采集的数据可视化,实时生成高精度、高质量三维模型。
此外,大疆智图还支持导入POS数据、GCP数据,以提升重建精度,满足多种场景的重建需求。同时,它还支持基于同步定位、地图构建和影像正射纠正算法,在飞行过程中实时生成二维正射影像。